







一、研究背景
本篇论文探讨了机器人如何根据自然语言指令理解和执行复杂多阶段任务的问题。在现实世界中,机器人面临的挑战不仅包括理解指令的语义复杂性,还需要能够在不断变化的环境中制定和调整行动计划。尽管现有的模仿学习方法在简单任务中表现良好,但它们通常缺乏处理复杂环境动态和多义性自然语言的能力。此外,传统的符号规划方法虽然可以精确执行任务规划,但不擅长直接处理自然语言输入。
针对这些挑战,论文提出了一种神经符号交织方法——GOALNET,该方法结合了神经网络的强大学习能力和经典规划的精确决策能力。GOALNET通过迭代过程,不断从自然语言指令中推断出目标谓词,并生成相应的行动计划,直至完成整个任务。该方法旨在提高机器人在处理含多个子目标的复杂任务中的泛化能力和执行效率,尤其强调了在未知环境和新指令中的应用潜力。这些特性使GOALNET在自动化和机器人技术的实际应用中具有重要的实际意义和广泛的应用前景。
二、当前难点
-
自然语言的模糊性与复杂性:自然语言指令的不确定性和模糊性为机器人的理解和执行带来了挑战。指令中的语境依赖、多义性及隐含信息需通过高级的语义解析才能正确理解。此外,指令可能涉及多个动作和对象,增加了解析的复杂度。
-
多阶段任务的动态规划:机器人需要在不断变化的环境中完成多阶段任务,这要求机器人能够实时更新其行动计划以应对新情况。例如,任务环境中的对象位置和状态可能因外部因素而变化,机器人必须能够识别这些变化并据此调整其策略。
-
目标谓词的精确推断与执行:从复杂的指令中准确推断出目标谓词,并根据这些谓词制定行动策略,是实现有效任务执行的关键。这一过程需要机器人不仅理解指令中直接表达的内容,还要能推理出指令中隐含的目标和步骤。
三、技术方案

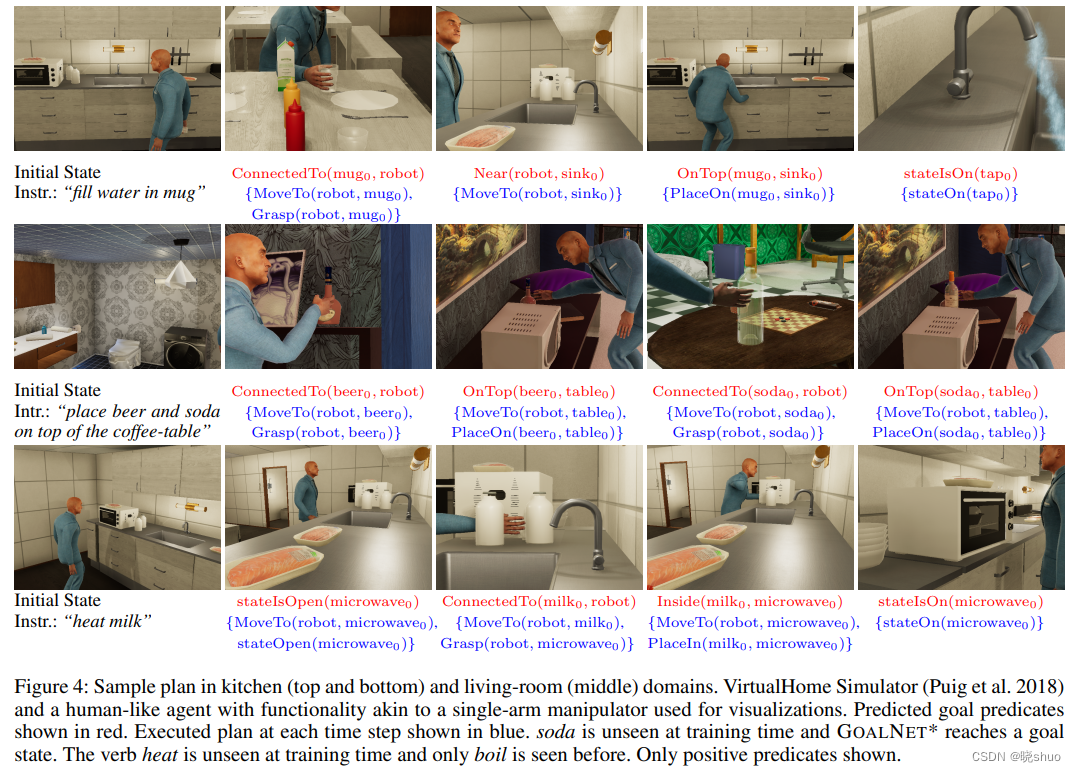
GOALNET 方法详细地将机器人自然语言理解与动作执行的复杂问题解构为两个交织的部分:目标谓词的推断和行动计划的生成,结合迭代执行的策略优化任务完成效率。
-
目标谓词推断:GOALNET 首先通过一个神经网络模型来解析和理解给定的自然语言指令,该模型能够识别并推断出与当前世界状态相关的下一步子目标谓词。这个过程中,模型使用密集向量表示来捕捉自然语言和环境状态之间的复杂关联。通过这种方式,GOALNET 不仅能处理训练时见过的场景,还能泛化到新的、未知的环境设置中,从而处理之前未遇到的指令和对象。
-
计划生成:根据推断出的目标谓词,GOALNET 利用一个经典的规划器来制定一系列动作序列,以实现这些谓词定义的子目标。这里的规划器设计得能够有效地排除与当前任务无关的谓词,优化行动计划,并适应复杂或大规模的任务环境。这个过程的核心在于将抽象的目标谓词转化为具体的、可执行的动作序列,使机器人能够实际操作并逐步完成任务。
-
迭代执行:在执行阶段,GOALNET 设计了一个迭代的反馈循环,机器人在每个动作执行后都会更新其对世界状态的认知,并根据新的状态和剩余的指令内容重新评估和推断下一步的目标谓词。这种迭代过程允许机器人在执行中发现并修正之前步骤中可能出现的错误,增加了任务完成的灵活性和准确性。通过不断的反馈和调整,GOALNET 能够有效应对环境中的变化和任务执行中可能出现的障碍,提高整体的任务完成率。
GOALNET 方法的这种设计结合了深度学习的强大语言处理能力和符号规划的逻辑严密性,通过神经网络和规划算法的交叉迭代,极大地提升了机器人理解和执行复杂自然语言指令的能力,尤其适用于动态和多变的实际环境。
四、实验结果

参考文献
[1] Gupta J, Sharma S, Tuli S, et al. GOALNET: Interleaving Neural Goal Predicate Inference with Classical Planning for Generalization in Robot Instruction Following[C]//Proceedings of the AAAI Conference on Artificial Intelligence. 2024, 38(18): 20113-20122.
















 2057
2057

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











