









V4L2是linux上用于采集图片、视频、音频数据的一套框架,对上向应用程序提供统一的接口,对下支持各类复杂硬件的灵活扩展,在远程会议、视频监控系统、嵌入式多媒体终端中都有广泛的应用。 V4L2通过打开驱动中创建的/dev/videoX设备,就可以进行一系列的操作,比如申请内存、设置格式、设置属性、开启采集等等。
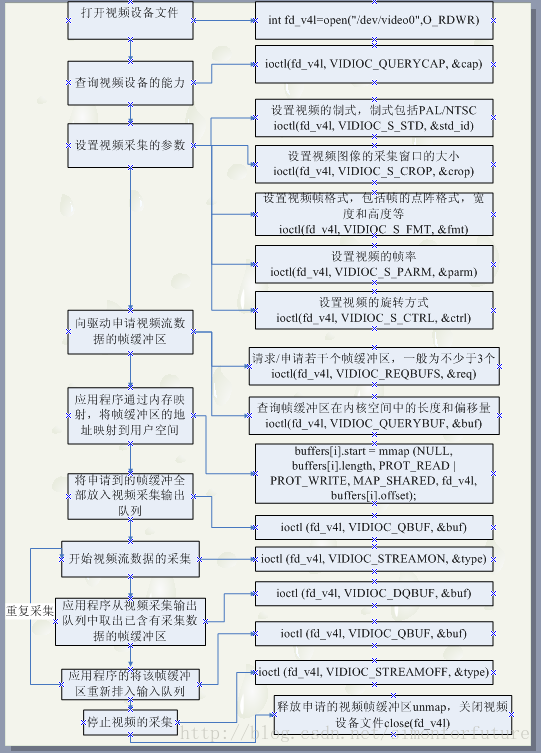
通过v4l2采集步骤
示例代码:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/videodev2.h>
#include <string.h>
#include <sys/mman.h>
//用户层缓冲区保存结构体
typedef struct BUFTYPE
{
void *start;
int length;
}*usr_buf;
unsigned int buf_num = 4;//指定缓冲区个数
int fd;//打开的设备fd
/**
* @brief init_camera 初始化相机设备属性
* @param dev 设备名称
* @return 成功返回0,失败返回-1
*/
int init_camera(const char* dev)
{
fd = open(dev, O_RDWR);
if(fd < 0){
printf("open \"%s\" error\n", dev);
return -1;
}
/**
* 查询设备属性
*/
struct v4l2_capability cap;
int ret = ioctl(fd, VIDIOC_QUERYCAP, &cap);
if (ret < 0) {
printf("VIDIOC_QUERYCAP error\n");
return -1;
}
printf("driver : %s\n",cap.driver);
printf("device : %s\n",cap.card);
printf("bus : %s\n",cap.bus_info);
printf("version : %d\n",cap.version);
if(cap.capabilities & V4L2_BUF_TYPE_VIDEO_CAPTURE){ /*判断是否为视频捕获设备*/
if(cap.capabilities & V4L2_CAP_STREAMING){/*判断是否支持视频流捕获*/
printf("support capture\n");
}else{
printf("unsupport capture\n");
}
}else {
printf("error\n");
return -1;
}
struct v4l2_fmtdesc fmtdesc;
fmtdesc.index=0;
fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
while(ioctl(fd, VIDIOC_ENUM_FMT, &fmtdesc) != -1)
{
printf("\t%d.%s\n",fmtdesc.index+1,fmtdesc.description);
fmtdesc.index++;
}
/*设置格式*/
struct v4l2_format fmt;
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//摄像头缓冲
fmt.fmt.pix.width = 640;
fmt.fmt.pix.height = 480;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_MJPEG;
if (ioctl(fd, VIDIOC_S_FMT, &fmt) < 0)
{
printf("set foramt:V4L2_PIX_FMT_MJPEG failed\n");
return -1;
}
return 0;
}
/**
* @brief mmap_buffer 分配用户缓冲区内存,并建立内存映射
* @return 成功返回0,失败返回-1
*/
int mmap_buffer()
{
usr_buf = (BUFTYPE*)calloc(buf_num, sizeof(BUFTYPE));
if (!usr_buf) {
printf("calloc \"frame buffer\" error : Out of memory\n");
return -1;
}
struct v4l2_requestbuffers req;
req.count = buf_num; //帧缓冲数量
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //视频捕获缓冲区类型
req.memory = V4L2_MEMORY_MMAP; //内存映射方式
if (ioctl(fd, VIDIOC_REQBUFS, &req) < 0) {
printf("VIDIOC_REQBUFS fail\n");
return -1;
}
/*映射内核缓存区到用户空间缓冲区*/
for(unsigned int i = 0; i < buf_num; ++i)
{
/*查询内核缓冲区信息*/
struct v4l2_buffer v4l2_buf;
memset(&v4l2_buf, 0, sizeof(v4l2_buf));
v4l2_buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buf.memory = V4L2_MEMORY_MMAP;
v4l2_buf.index = i;
if(ioctl(fd , VIDIOC_QUERYBUF, &v4l2_buf) < 0){
printf("VIDIOC_QUERYBUF failed\n");
return -1;
}
/* 建立映射关系
* 注意这里的索引号,v4l2_buf.index 与 usr_buf 的索引是一一对应的,
* 当我们将内核缓冲区出队时,可以通过查询内核缓冲区的索引来获取用户缓冲区的索引号,
* 进而能够知道应该在第几个用户缓冲区中取数据
*/
usr_buf[i].length = v4l2_buf.length;
usr_buf[i].start = (char *)mmap(0, v4l2_buf.length, PROT_READ | PROT_WRITE, MAP_SHARED, fd, v4l2_buf.m.offset);
if (MAP_FAILED == usr_buf[i].start){//若映射失败,打印错误
printf("mmap failed: %d\n",i);
return -1;
}else{
if (ioctl(fd, VIDIOC_QBUF, &v4l2_buf) < 0){ // 若映射成功则将内核缓冲区入队
printf("VIDIOC_QBUF failed\n");
return -1;
}
}
}
return 0;
}
/**
* @brief stream_on 开启视频流
* @return 成功返回0,失败返回-1
*/
int stream_on()
{
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (ioctl(fd, VIDIOC_STREAMON, &type) < 0)
{
printf("VIDIOC_STREAMON failed\n");
return -1;
}
return 0;
}
/**
* @brief write_frame 读取一帧图像
* @return 返回图像帧的索引index,读取失败返回-1
*/
int write_frame()
{
struct v4l2_buffer v4l2_buf;
v4l2_buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buf.memory = V4L2_MEMORY_MMAP;
if(ioctl(fd, VIDIOC_DQBUF, &v4l2_buf) < 0) // 内核缓冲区出队列
{
printf("VIDIOC_DQBUF failed, dropped frame\n");
return -1;
}
/*
* 因为内核缓冲区与用户缓冲区建立的映射,所以可以通过用户空间缓冲区直接访问这个缓冲区的数据
*/
char buffer[256];
sprintf(buffer,"/home/fox/qt_project/build-qt_cpp-Debug/%d.mjpg",v4l2_buf.index);
int file_fd = open(buffer,O_RDWR | O_CREAT); // 若打开失败则不存储该帧图像
if(file_fd > 0){
printf("saving %d images\n",v4l2_buf.index);
write(file_fd,usr_buf[v4l2_buf.index].start,v4l2_buf.bytesused);
close(file_fd);
}
if (ioctl(fd, VIDIOC_QBUF, &v4l2_buf) < 0) //缓冲区重新入队
{
printf("VIDIOC_QBUF failed, dropped frame\n");
return -1;
}
return v4l2_buf.index;
}
/**
* @brief stream_off 关闭视频流
* @return 成功返回0,失败返回-1
*/
int stream_off()
{
/*关闭视频流*/
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if(ioctl(fd,VIDIOC_STREAMOFF,&type) == -1)
{
printf("Fail to ioctl 'VIDIOC_STREAMOFF'");
return -1;
}
return 0;
}
/**
* @brief unmap_buffer 解除缓冲区映射
* @return 成功返回0,失败返回-1
*/
int unmap_buffer()
{
/*解除内核缓冲区到用户缓冲区的映射*/
for(unsigned int i = 0; i < buf_num; i++)
{
int ret = munmap(usr_buf[i].start, usr_buf[i].length);
if (ret < 0)
{
printf("munmap failed\n");
return -1;
}
}
free(usr_buf); // 释放用户缓冲区内存
return 0;
}
/**
* @brief release_camera 关闭设备
*/
void release_camera()
{
close(fd);
}
int main(void)
{
int ret = init_camera("/dev/video1");
if(ret < 0){
printf("init_camera error\n");
return -1;
}
ret = mmap_buffer();
if(ret < 0){
printf("mmap_buffer error\n");
return -1;
}
ret = stream_on();
if(ret < 0){
printf("stream_on error\n");
return -1;
}
for(int i=0;i<5;i++)
{
write_frame();
}
ret = stream_off();
if(ret < 0){
printf("stream_off error\n");
return -1;
}
ret = unmap_buffer();
if(ret < 0){
printf("unmap_buffer error\n");
return -1;
}
release_camera();
return 0;
}














 1983
1983











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









