







一.V4L2简介
V4L2 (Video4Linux2)是Linux内核中的一个框架,提供了一套用于视频设备驱动程序开发的API。它是一个开放的、通用的、模块化的视频设备驱动程序框架,允许Linux操作系统和应用程序与各种视频设备(如摄像头、视频采集卡等)进行交互。
V4L2提供了一个通用的API,使应用程序能够访问和控制视频设备,包括获取设备信息、设置设备参数、采集视频数据、控制设备状态等。V4L2还提供了一个统一的视频数据格式,允许应用程序在处理视频数据时无需考虑设备的具体格式。
二.V4L2采集原理
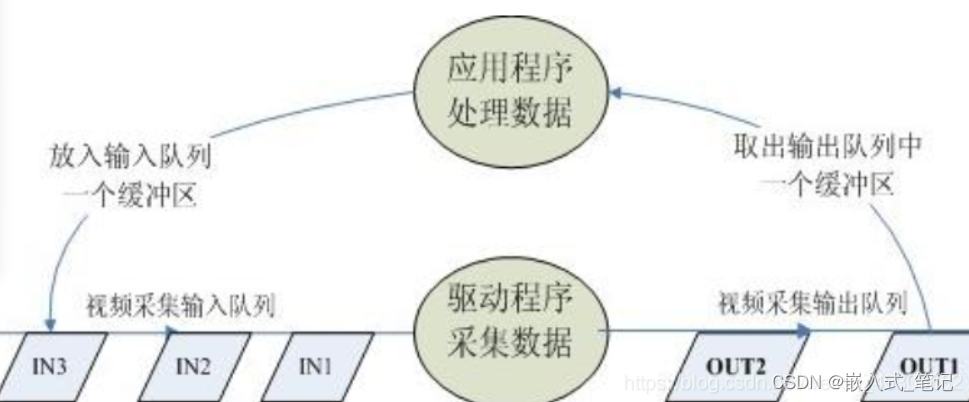
当启动视频采集后,驱动程序开始采集一帧图像数据,会把采集的图像数据放入视频采集输入队
列的第一个帧缓冲区,一阵图像数据就算采集完成了。第一个帧缓冲区存满一帧图像数据后,驱
动程序将该帧缓冲区移至视频采集输出队列,等待应用程序从输出队列取出,应用程序取出图像
数据可以对图像数据进行处理或存储操作,然后将帧该缓冲区放入视频采集输入队列的尾部。驱
动程序接下来采集下一帧数据,放入第二个缓冲区,同样的帧缓冲区存满一帧数据后,驱动程序
将该缓冲区移至视频采集输出队列,应用程序将该帧缓冲区的图像数据取出后又将该帧缓冲区放
入视频输入队列尾部,这样循环往复就实现了循环采集。
三.V4L2采集流程
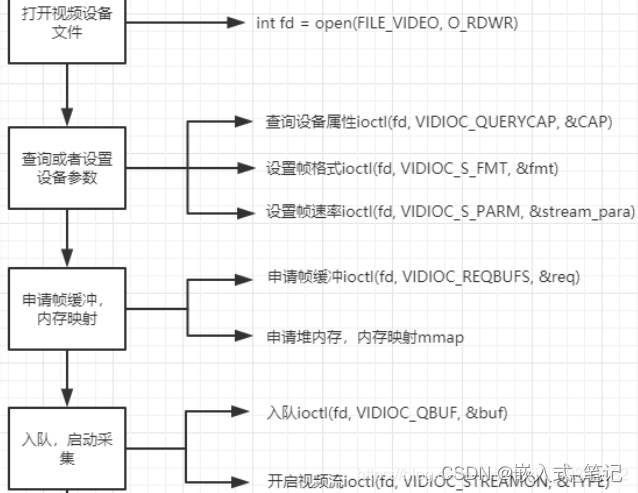
使用 V4L2 进行视频采集,一般分为 5 个步骤:
(1) 打开设备,进行初始化参数设置,通过 V4L2 接口设置视频图像的采集
窗口、采集的点阵大小和格式;
(2) 申请图像帧缓冲,并进行内存映射,将这些帧缓冲区从内核空间映射
到用户空间,便于应用程序读取、处理图像数据;
(3) 将帧缓冲进行入队操作,启动视频采集;
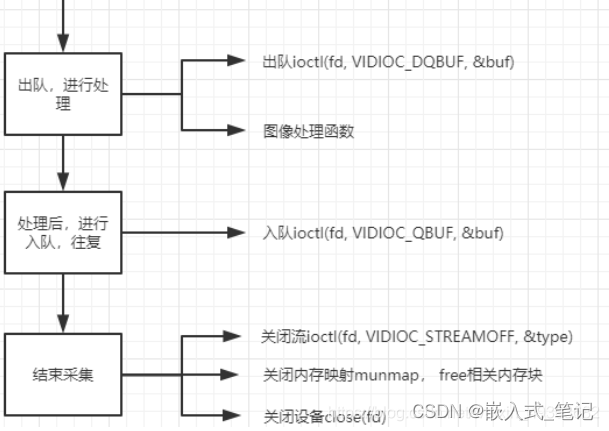
(4) 驱动开始视频数据的采集,应用程序从视频采集输出队列取出帧缓冲
区,处理完后,将帧缓冲区重新放入视频采集输入队列,循环往复采集连续的视
频数据;
(5) 释放资源,停止采集工作。
四.V4L2应用编程
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <linux/videodev2.h>
#include <linux/fb.h>
typedef struct camera_format {
unsigned char description[32]; //字符串描述信息
unsigned int pixelformat; //像素格式
} cam_fmt;
static cam_fmt cam_fmts[2];
int lcdfd = 0; //LCD设备文件描述符
int *lcdptr = NULL; //LCD映射到内存的指针
int lcd_w=800, lcd_h=1280 ; //LCD屏幕的分辨率
int video_width = 640, video_height= 360; //摄像头采集数据的分辨率
static int fb_dev_init(void)
{
//打开LCD设备文件
lcdfd = open("/dev/fb0", O_RDWR);
if (lcdfd < 0)
{
perror("LCD open failed:");
}
/*获取LCD信息*/
struct fb_var_screeninfo info;
int lret = ioctl(lcdfd, FBIOGET_VSCREENINFO, &info);
if (lret < 0)
{
perror("get info failed:");
}
//获取LCD的分辨率
lcd_w = info.xres;
lcd_h = info.yres;
//映射LCD到内存
lcdptr = (int *)mmap(NULL, lcd_w*lcd_h*4,PROT_READ | PROT_WRITE, MAP_SHARED, lcdfd, 0);
if (lcdptr == NULL)
{
perror("lcd mmap failed:");
}
//清空LCD屏幕并填充白色背景
memset(lcdptr, 0xFF, lcd_w*lcd_h*4);
return 0;
}
//将YUYV格式的数据转换为RGB格式
void yuyv_to_rgb(unsigned char *yuyvdata, unsigned char * rgbdata, int w, int h)
{
int r1, g1, b1;
int r2, g2, b2;
for (int i = 0; i < w*h/2; i++)
{
char data[4];
memcpy(data, yuyvdata + i*4, 4);
unsigned char Y0 = data[0];
unsigned char U0 = data[1];
unsigned char Y1 = data[2];
unsigned char V1 = data[3];
r1 = Y0 + 1.4075*(V1 - 128);
if (r1 > 255)
r1 = 255;
if (r1 < 0)
r1 = 0;
g1 = Y0 - 0.3455*(U0 - 128) - 0.7169*(V1 - 128);
if (g1 > 255)
g1 = 255;
if (g1 < 0)
g1 = 0;
b1 = Y0 + 1.779*(U0 - 128);
if (b1 > 255)
b1 = 255;
if (b1 < 0)
b1 = 0;
r2 = Y1 + 1.4075*(V1 - 128);
if (r2 > 255)
r2 = 255;
if (r2 < 0)
r2 = 0;
g2 = Y1 - 0.3455*(U0 - 128) - 0.7169*(V1 - 128);
if (g2 > 255)
g2 = 255;
if (g2 < 0)
g2 = 0;
b2 = Y1 + 1.779*(U0 - 128);
if (b2 > 255)
b2 = 255;
if (b2 < 0)
b2 = 0;
rgbdata[i*6 + 0] = r1;
rgbdata[i*6 + 1] = g1;
rgbdata[i*6 + 2] = b1;
rgbdata[i*6 + 3] = r2;
rgbdata[i*6 + 4] = g2;
rgbdata[i*6 + 5] = b2;
}
}
void lcd_show_rgb(unsigned char *rgbdata, int w, int h)
{
unsigned int *ptr = lcdptr;
for (int i = 0; i < h; i++)
{
for (int j = 0; j < w; j++)
{
memcpy(ptr + j, rgbdata + j*3, 3);
}
ptr += lcd_w;//偏移一行
rgbdata += w*3;//偏移一行
}
}
int main(int argc,char *argv[])
{
int ret,i;
int fd;
unsigned short *base;
unsigned short *start;
int min_w, min_h;
int j;
fb_dev_init();
/* 步骤一,打开视频设备 */
fd = open(argv[1], O_RDWR);
if (fd < 0)
{
printf("file open error\n");
return -1;
}
/* 步骤二,查询设备能力 */
//查询设备的基本信息
struct v4l2_capability cap; // 定义一个v4l2_capability结构体的变量cap
// 使用ioctl函数发送VIDIOC_QUERYCAP命令来获取视频设备的基本信息,并将结果保存到cap变量中
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) < 0)
{
perror("VIDIOC_QUERYCAP");
return -1;
}
//查看支持的图像格式、分辨率、帧率
struct v4l2_fmtdesc fmtdesc = {0};//定义支持的像素格式结构体
struct v4l2_frmsizeenum frmsize = {0};//定义支持的分辨率结构体
struct v4l2_frmivalenum frmival = {0};//定义支持的帧率结构体
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//设置视频采集类型为 V4L2_BUF_TYPE_VIDEO_CAPTURE
fmtdesc.index = 0;
while (!ioctl(fd, VIDIOC_ENUM_FMT, &fmtdesc))//获取支持的像素格式
{
strcpy(cam_fmts[fmtdesc.index].description, fmtdesc.description);
cam_fmts[fmtdesc.index].pixelformat = fmtdesc.pixelformat;
fmtdesc.index++;
}
frmsize.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
frmival.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
for(i=0;i<fmtdesc.index;i++)//枚举每一种像素格式
{
printf("description:%s\npixelformat:0x%x\n", cam_fmts[i].description,cam_fmts[i].pixelformat );
frmsize.index = 0;
frmsize.pixel_format = cam_fmts[i].pixelformat;
frmival.pixel_format = cam_fmts[i].pixelformat;
// 2.枚举出摄像头所支持的所有视频采集分辨率
while (0 == ioctl(fd, VIDIOC_ENUM_FRAMESIZES, &frmsize))
{
printf("size<%d*%d> ",frmsize.discrete.width,frmsize.discrete.height);
frmsize.index++;
frmival.index = 0;
frmival.width = frmsize.discrete.width;
frmival.height = frmsize.discrete.height;
// 3. 获取摄像头视频采集帧率
while (0 == ioctl(fd, VIDIOC_ENUM_FRAMEINTERVALS, &frmival))
{
printf("<%dfps>", frmival.discrete.denominator/frmival.discrete.numerator);
frmival.index++;
}
printf("\n");
}
printf("\n");
}
/*步骤三,设置采集参数,视频帧宽度、高度、格式、视频帧率等信息*/
struct v4l2_format fmt = {0};
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//type 类型
fmt.fmt.pix.width = video_width; //设置视频帧宽度
fmt.fmt.pix.height = video_height;//设置视频帧高度
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; //设置像素格式
if (ioctl(fd, VIDIOC_S_FMT, &fmt) < 0)
{
printf("ioctl error: VIDIOC_S_FMT\n");
return -1;
}
struct v4l2_streamparm streamparm = {0};
streamparm.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl(fd, VIDIOC_G_PARM, &streamparm);
if (V4L2_CAP_TIMEPERFRAME & streamparm.parm.capture.capability)
{
streamparm.parm.capture.timeperframe.numerator = 1;
streamparm.parm.capture.timeperframe.denominator = 30;//30fps
if (0 > ioctl(fd, VIDIOC_S_PARM, &streamparm))
{
printf("ioctl error: VIDIOC_S_PARM");
return -1;
}
}
/*步骤四,请求帧缓冲*/
struct v4l2_requestbuffers reqbuffer;
reqbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
reqbuffer.count = 4;//缓存数量
reqbuffer.memory = V4L2_MEMORY_MMAP;//映射方式
ret = ioctl(fd, VIDIOC_REQBUFS, &reqbuffer);
if (ret < 0)
{
printf("Request Queue space failed \n");
return -1;
}
/*步骤五,映射帧缓冲*/
struct v4l2_buffer mapbuffer;
unsigned char *mptr[4];
unsigned int size[4];//存储大小,方便释放
mapbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
for (i = 0; i < 4; i++)
{
mapbuffer.index = i;
ret = ioctl(fd, VIDIOC_QUERYBUF, &mapbuffer);
if (ret < 0)
{
printf("Kernel space queue failed\n");
return -1;
}
mptr[i] = (unsigned char *)mmap(NULL, mapbuffer.length, PROT_READ | PROT_WRITE, MAP_SHARED, fd, mapbuffer.m.offset);
size[i] = mapbuffer.length;
//使用完毕,入队
ret = ioctl(fd, VIDIOC_QBUF, &mapbuffer);
if (ret < 0)
{
printf("ioctl error: VIDIOC_QBUF \n");
return -1;
}
}
/*步骤六,开启视频采集*/
int type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ret = ioctl(fd, VIDIOC_STREAMON, &type);
if (ret < 0)
{
printf("ioctl error: VIDIOC_STREAMON \n");
return -1;
}
//步骤七,读取数据、对数据进行处理
unsigned char rgbdata[video_width*video_height*3];
while (1)
{
struct v4l2_buffer readbuffer;
//出队列
readbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ret = ioctl(fd, VIDIOC_DQBUF, &readbuffer);
if (ret < 0)
{
printf("ioctl error:VIDIOC_DQBUF \n");
}
//显示在LCD上
yuyv_to_rgb(mptr[readbuffer.index], rgbdata, video_width, video_height);
lcd_show_rgb(rgbdata, video_width, video_height);
//通知内核已经使用完毕,入队列
ret = ioctl(fd, VIDIOC_QBUF, &readbuffer);
if (ret < 0)
{
printf("ioctl error:VIDIOC_QBUF \n");
}
}
//步骤八,停止视频采集和释放资源
ret = ioctl(fd, VIDIOC_STREAMOFF, &type);
if (ret < 0)
{
printf("ioctl error:VIDIOC_STREAMOFF \n");
return -1;
}
//释放映射空间
for (i = 0; i < 4; i++)
{
munmap(mptr[i], size[i]);
}
close(fd);
return 0;
}
















 2729
2729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











