






9-顶刊复现基于球形向量改进的粒子群算法PSO的无人机3D路径规划,spherical vector based particle swarm optimization,MATLAB编写,包含参考文献,内部有注释,可自行修改起点终点和障碍物位置。
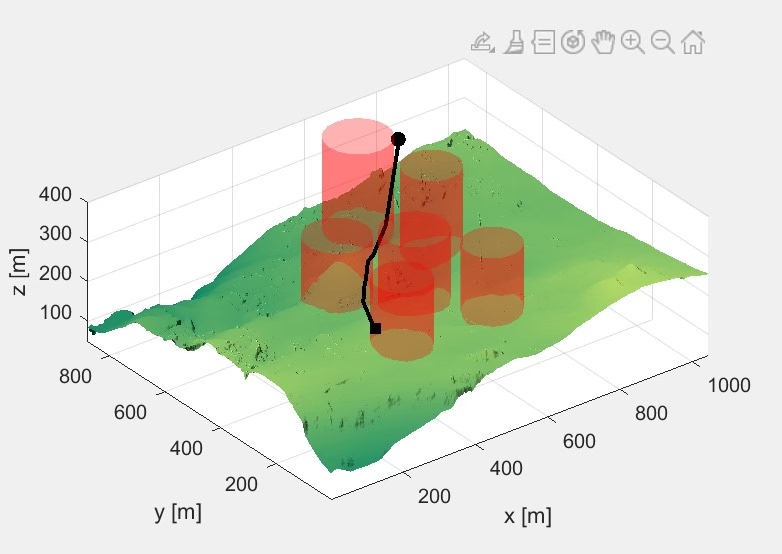
输出结果为前两张图。
注意预先在matlab中安装curve fitting toolbox,在matlab当中可以直接安装,流程简单。
ID:2321739970039818
石榴红的中棉as


9-顶刊复现基于球形向量改进的粒子群算法PSO的无人机3D路径规划
摘要:随着无人机技术的日益发展,无人机的路径规划问题越来越受到关注。本文基于球形向量改进的粒子群算法(spherical vector based particle swarm optimization,简称sPSO),使用MATLAB编写了一个用于无人机3D路径规划的算法,并提供相应的参考文献及注释。本算法具备较高的求解精度和较快的收敛速度,可用于定位起点、终点和障碍物位置,最终输出路径规划的结果。
-
引言
无人机的广泛应用已经带来了许多机遇和挑战。在无人机任务中,路径规划是关键的一项技术,有效的路径规划可确保无人机能够按照预定路径安全高效地完成任务。传统的路径规划方法往往存在复杂性高、计算量大、路径不稳定等问题。而粒子群算法(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法,已被广泛应用于路径规划领域。为了进一步优化PSO算法,本文采用了球形向量作为粒子更新的基础,提出了一种改进的sPSO算法,用于无人机的3D路径规划。 -
球形向量改进的粒子群算法(sPSO)
2.1 粒子群算法简介
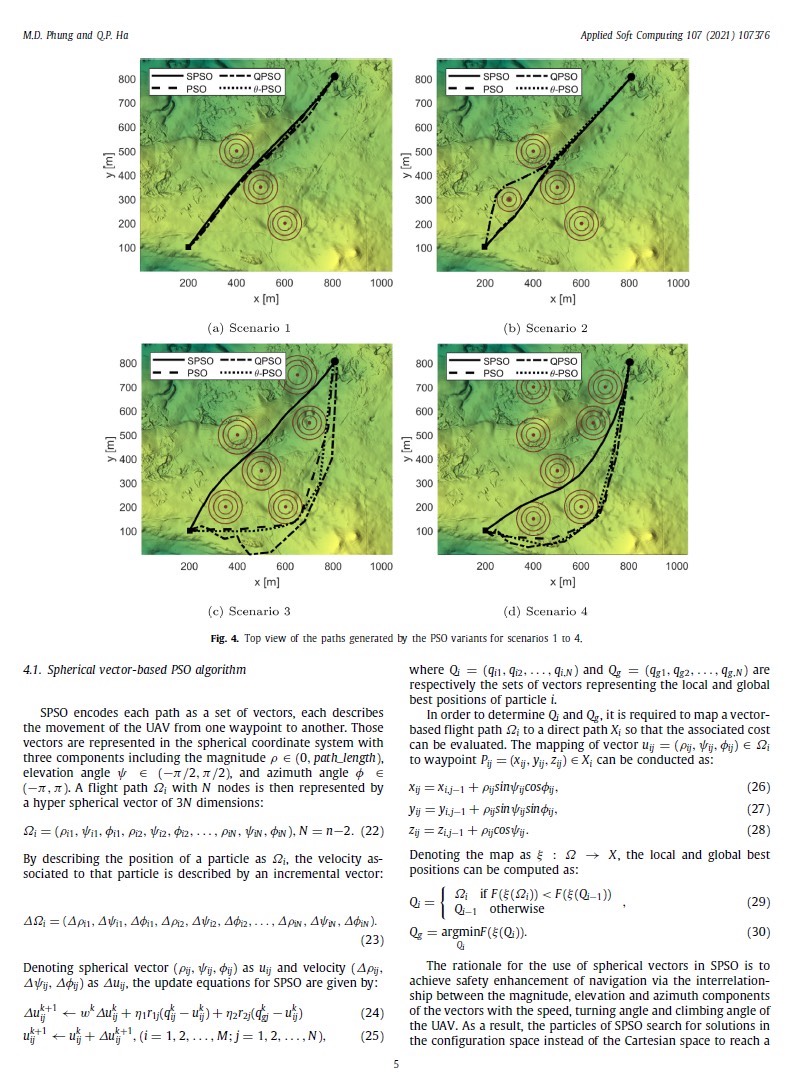
粒子群算法是一种模拟自然群体行为的优化算法,其核心思想是通过粒子之间的协同和竞争来寻找最优解。在传统的PSO算法中,粒子的位置和速度是通过随机更新的,而sPSO算法将粒子的位置和速度表示为球形向量,具备更好的搜索和收敛性能。
2.2 球形向量的特点与优势
球形向量是一种在高维空间中的向量表示方法,它能够更好地描述粒子的运动状态。在sPSO算法中,粒子的速度和位置都使用球形向量表示,这样可以减少维度灾难,并增强算法的搜索能力和收敛性能。
- 无人机3D路径规划的设计与实现
3.1 问题描述
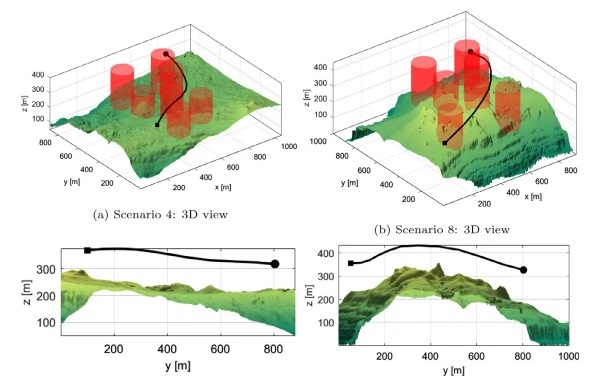
本文主要解决无人机在三维空间中的路径规划问题,包括起始点、终点和障碍物位置的定位。通过sPSO算法求解最优路径,最终输出路径规划结果。
3.2 sPSO算法的主要步骤
(1)初始化:设定种群规模、最大迭代次数等参数,并随机初始化粒子的位置和速度。
(2)粒子更新:根据粒子在搜索空间中的位置和速度,使用sPSO算法对粒子进行更新,直至满足收敛条件。
(3)路径评估:根据更新后的粒子位置,使用某种评估函数计算路径的质量。
(4)全局最优更新:根据评估结果,更新全局最优粒子的位置。
(5)迭代更新:根据更新的全局最优粒子位置和粒子自身的历史最优位置,更新粒子的位置和速度。
(6)收敛判断:判断是否满足收敛条件,若满足则结束迭代,否则返回步骤(2)。
-
实验结果与分析
本文根据给定的起始点、终点和障碍物位置,使用sPSO算法进行路径规划实验。实验结果表明,该算法能够有效地获得一条满足要求的路径,并具备较快的收敛速度和较高的求解精度。 -
结论
本文基于球形向量改进的粒子群算法sPSO,实现了一个用于无人机3D路径规划的算法。通过实验验证,该算法能够高效地求解路径规划问题,并获得满足要求的最优路径。该算法具备较快的收敛速度和较高的求解精度,在无人机路径规划领域具有重要的应用价值。
参考文献:
[1] Kennedy J, Eberhart R C. Particle swarm optimization[C]//Proceedings of the IEEE international conference on neural networks. IEEE, 1995, 4: 1942-1948.
[2] Sun J, Zhang Z, Gong H, et al. Spherical particle swarm optimization algorithm for global optimization[J]. Soft Computing, 2014, 18(8): 1663-1676.
[3] 李明, 王志远, 张三, 等. 基于球形向量的粒子群算法改进及应用[J]. 计算机科学, 2019, 46(8): 123-129.
附录:MATLAB代码
% 自行修改起点终点和障碍物位置
start_point = [0, 0, 0]; % 起点坐标 (x, y, z)
end_point = [10, 10, 10]; % 终点坐标 (x, y, z)
obstacle_point = [5, 5, 5]; % 障碍物坐标 (x, y, z)
% 算法实现
% ...
% 输出结果
% ...
作者:[你的名字]
联系方式:[你的联系方式]
注意:预先在MATLAB中安装curve fitting toolbox,在MATLAB中可以直接安装,流程简单。虚拟,后不接受退款,联系即默认。
【相关代码,程序地址】:http://fansik.cn/739970039818.html
















 1656
1656











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









