







 AutoSar是一种汽车电子系统架构,旨在实现标准化、模块化和可重用性。它包括Application Interfaces (AI)、Classic Platform (CP) 和 Adaptive Platform (AP),通过配置工具生成代码实现功能。AI关注应用接口的标准化,CP的核心是虚拟功能总线,而AP则支持自适应和分布式应用程序开发。基础标准强化了不同平台间的互操作性。
AutoSar是一种汽车电子系统架构,旨在实现标准化、模块化和可重用性。它包括Application Interfaces (AI)、Classic Platform (CP) 和 Adaptive Platform (AP),通过配置工具生成代码实现功能。AI关注应用接口的标准化,CP的核心是虚拟功能总线,而AP则支持自适应和分布式应用程序开发。基础标准强化了不同平台间的互操作性。
目录
小柴的知乎![]() https://www.zhihu.com/people/jiu_sheng小柴带你学AutoSar总目录
https://www.zhihu.com/people/jiu_sheng小柴带你学AutoSar总目录![]() https://blog.csdn.net/qianshang52013/article/details/138140235?spm=1001.2014.3001.5501
https://blog.csdn.net/qianshang52013/article/details/138140235?spm=1001.2014.3001.5501
AUTOSAR(Automotive Open System Architecture)是一种开放式的汽车电子系统架构,旨在实现汽车电子系统的标准化、模块化和可重用性。
其主要目标包括:
-
标准化:通过制定统一的标准和规范,实现汽车电子系统的软件和硬件之间的互操作性,降低系统集成和开发的复杂性。
-
模块化:将汽车电子系统划分为多个独立的模块,每个模块具有特定的功能和接口,可以独立设计、开发和测试,从而提高系统的灵活性和可维护性。
-
可重用性:通过定义通用的软件组件和接口,实现汽车电子系统的功能模块化和可重用性,减少重复开发工作,提高开发效率和质量。
-
安全性:提供安全性标准和机制,确保汽车电子系统的稳定性、可靠性和安全性,以应对日益复杂的汽车电子系统和网络攻击等安全威胁。
总的来说,AUTOSAR的概念和目标是为了推动汽车电子系统的标准化、模块化和可重用性,以满足现代汽车对于更高效、更安全和更智能的需求。
最后通过配置工具来生成代码,实现想要的功能!
小柴大白话:代码只想写一次,剩下的全部通过配置来设置!
Autosar整体认知

AI(Application Interfaces)

重点是已建立的应用程序的接口规范,以强调软件重用和交换,这被认为是AUTOSAR的主要要求之一。
标准化应用程序接口的部署是应用程序重用的一个关键因素。
应用程序接口描述包含由所有合作伙伴的专家标准化的丰富数据。
这些标准化接口允许软件设计者和实施者在独立于特定硬件和/或电子控制单元(ECU)扩展或重用软件组件的情况下使用它们。
一般来说,应用程序是ECU的竞争优势。AUTOSAR不会标准化应用程序的内部功能行为,例如算法,而是应用程序之间交换的内容。
典型应用包括电子稳定控制(ESC)、转向、电子驻车制动、驻车距离控制、车外灯、防盗系统、遥控无钥匙进入等。
CP(Classic Platform)
概念:
一个基本概念是虚拟功能总线(VFB)。
这种虚拟总线将应用程序从基础设施中分离出来。它通过专用端口进行通信,这意味着应用软件的通信接口必须映射到这些端口。VFB处理单个ECU内部以及ECU之间的通信。从应用程序的角度来看,不需要底层技术或依赖关系的详细知识。这支持应用软件的独立于硬件的开发和使用。
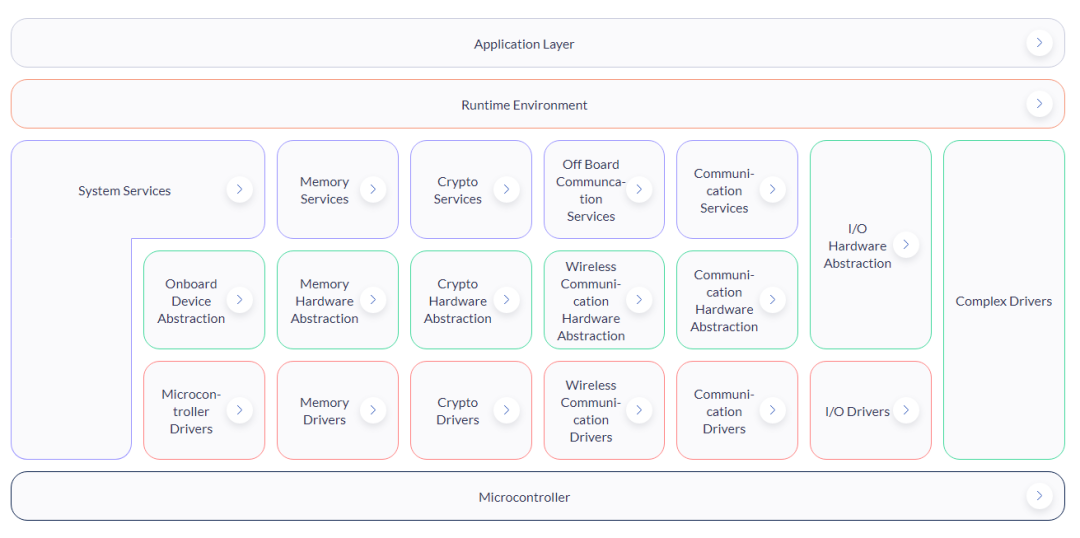
AUTOSAR分层架构提供了软件和硬件独立性所需的所有机制。
它区分了运行在微控制器(µC)上的三个主要软件层:应用层、运行时环境(RTE)和基础软件(BSW)。
不同汽车领域的应用程序通过RTE与基本软件连接。
除了定义架构和接口之外,AUTOSAR还定义了一种方法,能够配置完整的AUTOSAR堆栈,并增强不同工具链之间的互操作能力。
一方面,这对于开发项目中的协作很重要,另一方面,这对于降低开发成本也很重要。
标准化ECU软件架构的主要概念是通过软件抽象层RTE(运行时环境)将独立于硬件的应用软件和面向硬件的基础软件(BSW)分开。在RTE的上层,该抽象层支持开发特定于OEM且具有竞争力的软件应用程序。在RTE的低端,它支持基本软件的标准化和OEM独立性。AUTOSAR软件架构的另一个特点是适用于多种车型的ECU软件的可扩展性、跨ECU分布应用程序(功能软件模块)的可能性以及集成不同来源软件模块的能力。
AUTOSAR软件架构中的基本软件进一步分为以下几层:服务、ECU抽象和微控制器抽象。通过RTE实现的应用层与基本软件的分离包括控制这些层之间的数据交换。这构成了应用程序级面向组件、独立于硬件的软件结构的基础,软件组件(SWC)是独立的单元。由于其硬件独立性,因此有可能在不了解所使用或计划的硬件的情况下开发软件控制系统,并在开发期间灵活地将现有软件控制系统重新定位到电子控制单元。
Methodology
除了软件架构之外,AUTOSAR还为汽车软件开发引入了统一的方法。这主要是由改善参与当今汽车项目的不同方之间的协作的需求所驱动的。
AUTOSAR提供了指定将软件组件集成到ECU上以及将不同ECU集成到各种不同总线系统上的整个网络通信所需的所有方面的方法。该方法定义了活动对工作产品的依赖关系,预计将支持AUTOSAR中的活动、描述和工具使用。
描述(.arxml)基于AUTOSAR模板,该模板定义了正式的交换格式(AUTOSAR模式)和伴随交换格式的语义约束。这些描述用于保存在AUTOSAR方法中生成或使用的信息。各种生成器可以利用描述中的信息来支持RTE和AUTOSAR基本软件(包括操作系统)的配置和生成。
也就是说:Autosar可以通过配置来实现功能
AP(Adaptive Platform)
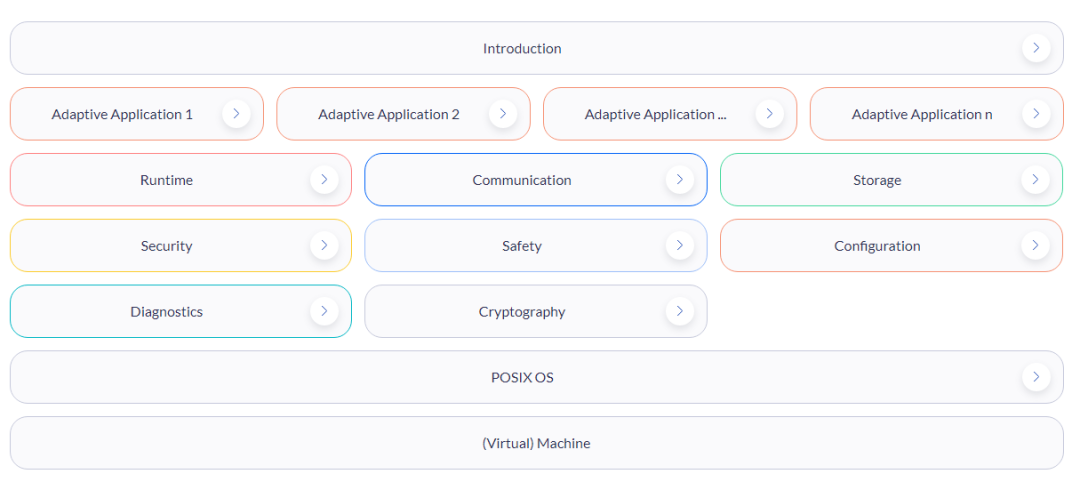
AUTOSAR扩展了现有的方法,能够为经典平台和自适应平台提供通用的方法。支持功能应用程序的分布式、独立和敏捷开发需要一种标准化的开发方法。
AUTOSAR自适应方法涉及工作产品及其各自任务的标准化。工作产品描述诸如服务、应用程序、机器及其配置之类的工件。各个任务定义了工作产品如何为基于自适应平台开发产品所需的活动交换设计信息。
Foundation

基础标准的目的是加强AUTOSAR平台之间的互操作能力。Foundation包含AUTOSAR平台之间共享的通用要求和技术规范(例如协议)。
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











