







环境:Manifold2-G,系统为Linux16.04;一台win10电脑,无人机和遥控器。
下载SDK:
1、下载OnboardSDK
2、在windows上安装DJI Assitant 2;确保可以用遥控器控制无人机飞行
连接遥控器和Assitant 2,具体参考https://blog.csdn.net/qiao_19/article/details/118704474?spm=1001.2014.3001.5501
连接妙算平台和无人机:
使用UART线连接妙算的UART1接口和无人机的的扩展接口。


注册APP:
在用户中心创建应用,获取应用ID和KEY,地址为https://developer.dji.com/user/apps/#all。

启动API控制:
在Assitant上点击“启动API控制”,将波特率设为10000。

配置Linux:
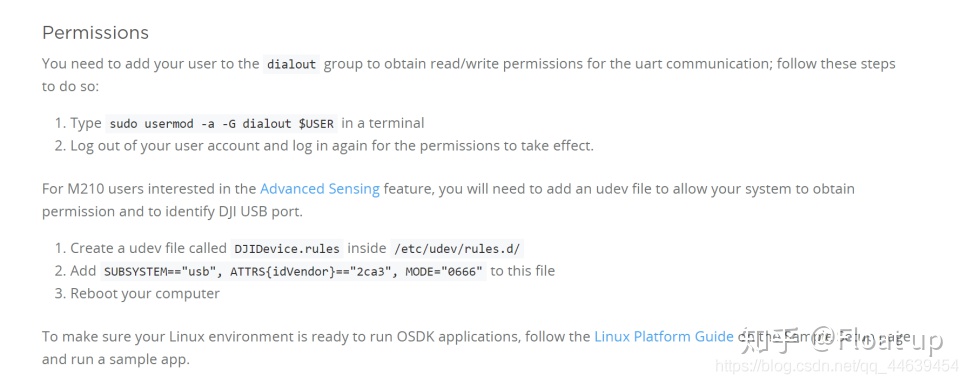
然后重启
运行示例:
1、创建工作空间:
mkdir catkin_ws
cd catkin_ws
mkdir src
cd src
catkin_init_workspace2、将下载好的OnboardSDK 复制到src目录下,解压缩。
cp Onboard-SDK-master.zip /catkin_ws/src/
sudo unzip Onboard-SDK-master.zip3、编辑onboard-sdk/sample/platform/linux/common/UserConfig.txt
id和key在注册APP的地方获取。
app_id:
app_key:
device:/dev/ttyTHS2
baudrate:1000000
acm_port:/dev/ttyACM0
4、在解压后的SDK目录上编译
mkdir build
cd build
cmake ..
make
//如果想要高级传感器功能,cmake ..变成cmake .. -DADVANCED_SENSING=0N5、在build文件夹下,执行命令
cp ../sample/platform/linux/common/UserConfig.txt bin/
6、执行飞行控制
./djiosdk-flightcontrol-sample UserConfig.txt UserConfig.txt7、在键盘输入B运行示例程序

参考资料:
1、https://zhuanlan.zhihu.com/p/334732730
2、https://developer.dji.com/onboard-sdk/documentation/M210-Docs/oes-checklist.html
3、https://developer.dji.com/onboard-sdk/documentation/M210-Docs/simulation-checklist.html















 232
232











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









