







第0章 绪论
1.(2015填空1)
一个器件(硬件或软件),它对混有噪声的数据序列_____或_____,达到_____有用信息的目的,称为滤波器;所以滤波器本质上可看作是对混有噪音的数据序列中的有用信息的_____ 。
过滤;估计;提取;估计器
第一章 自适应滤波引言
一、线性滤波的概念
1.(2013简答题1)什么是正交原理,如果把误差信号作为输出,那这个滤波器为什么称为“去相关滤波”?
正交原理:线性最优滤波(维纳滤波)的充要条件是滤波器的输出(参考信号即期望信号的估计)与误差(估计与参考信号的差)正交
为什么:e(n)作为输出时的维纳滤波(最优线性滤波),则是从y(n)中移除掉和输入X(n)相关的部分y~(n),输出y(n)中和输入X(n)不相关的部分
2.(2015填空2)
线性滤波指滤波器的输出(被滤波,平滑,预测的输出量)是其输入数据的_____,最优线性滤波指在一定条件下,线性滤波的结果是有用信息(被估计量,需提取的量)按某一准则的_____。维纳滤波是按_____准则的最优线性滤波;线性预测误差滤波是按_____准则的最优线性滤波器;实现维纳滤波器的条件是____________________;实现线性预测误差滤波的条件是_______________。
线性加权;最优估计;最小均方准则;最小均方准则;已知参考信号和输入信号互相关及输入信号的自相关矩阵;已知输入信号的自相关矩阵
二、维纳滤波
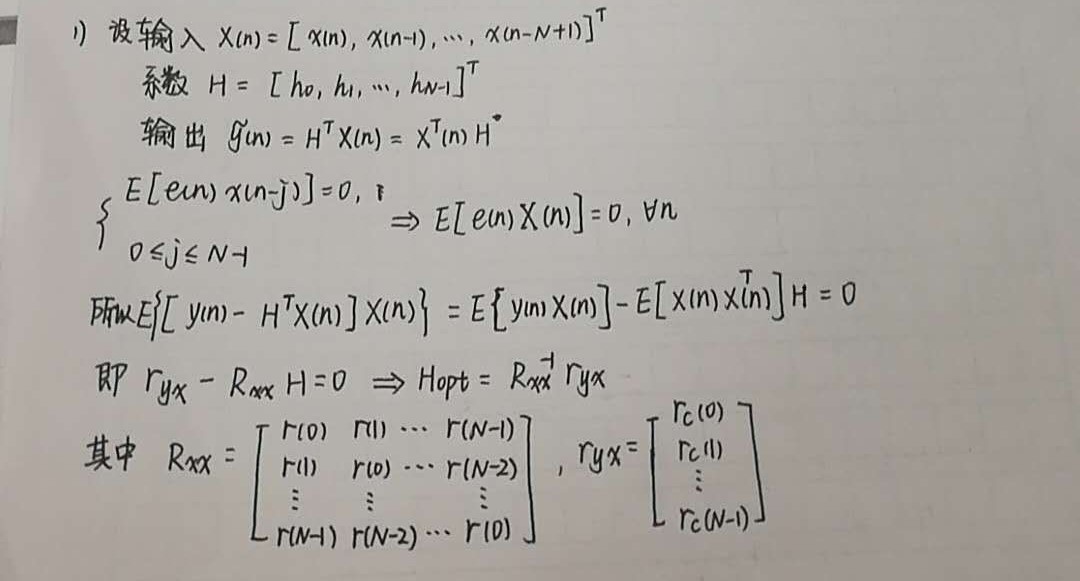
1.(2014大题1)设输入信号x(n),参考信号y(n)是均值为零的平稳离散时间信号,已知x(n)的自相关 r ( j ) = E { x ( n ) x ( n − j ) } r(j)=E\{x(n) x(n-j)\} r(j)=E{x(n)x(n−j)},y(n),x(n)的互相关 r c ( j ) = E { y ( n ) x ( n − j ) } r_c(j)=E\{y(n)x(n-j)\} rc(j)=E{y(n)x(n−j)}
1)试推导出由x(n)估计y(n)的N阶FIR维纳滤波器计算公式。
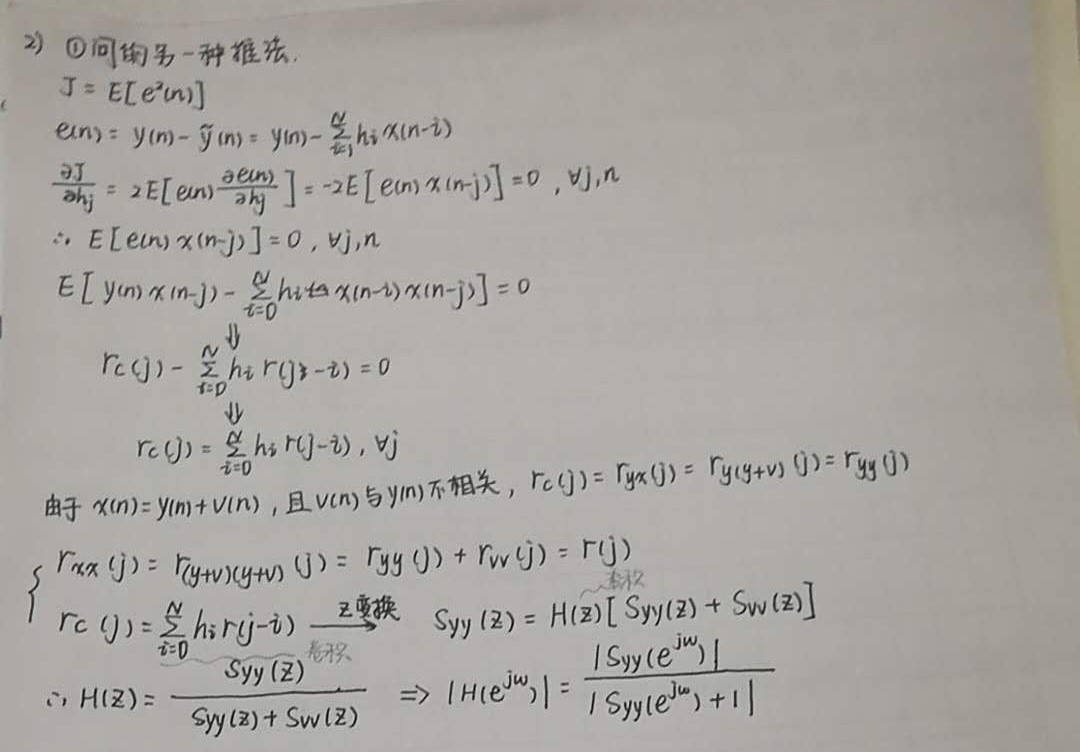
2)若x(n)=y(n)+v(n),其中v(n)为0均值方差为1的白噪声,与y(n)不相关。试用1)中得到的维纳滤波器的计算公式,求此条件下维纳滤波器的频率响应
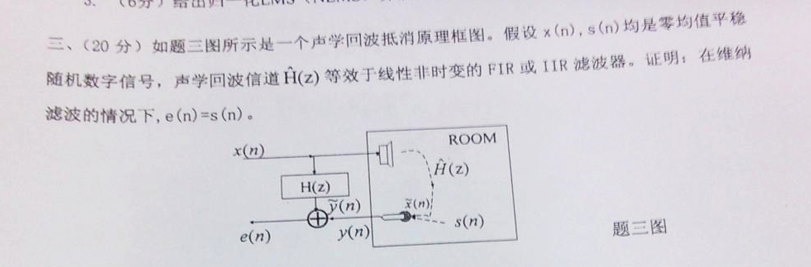
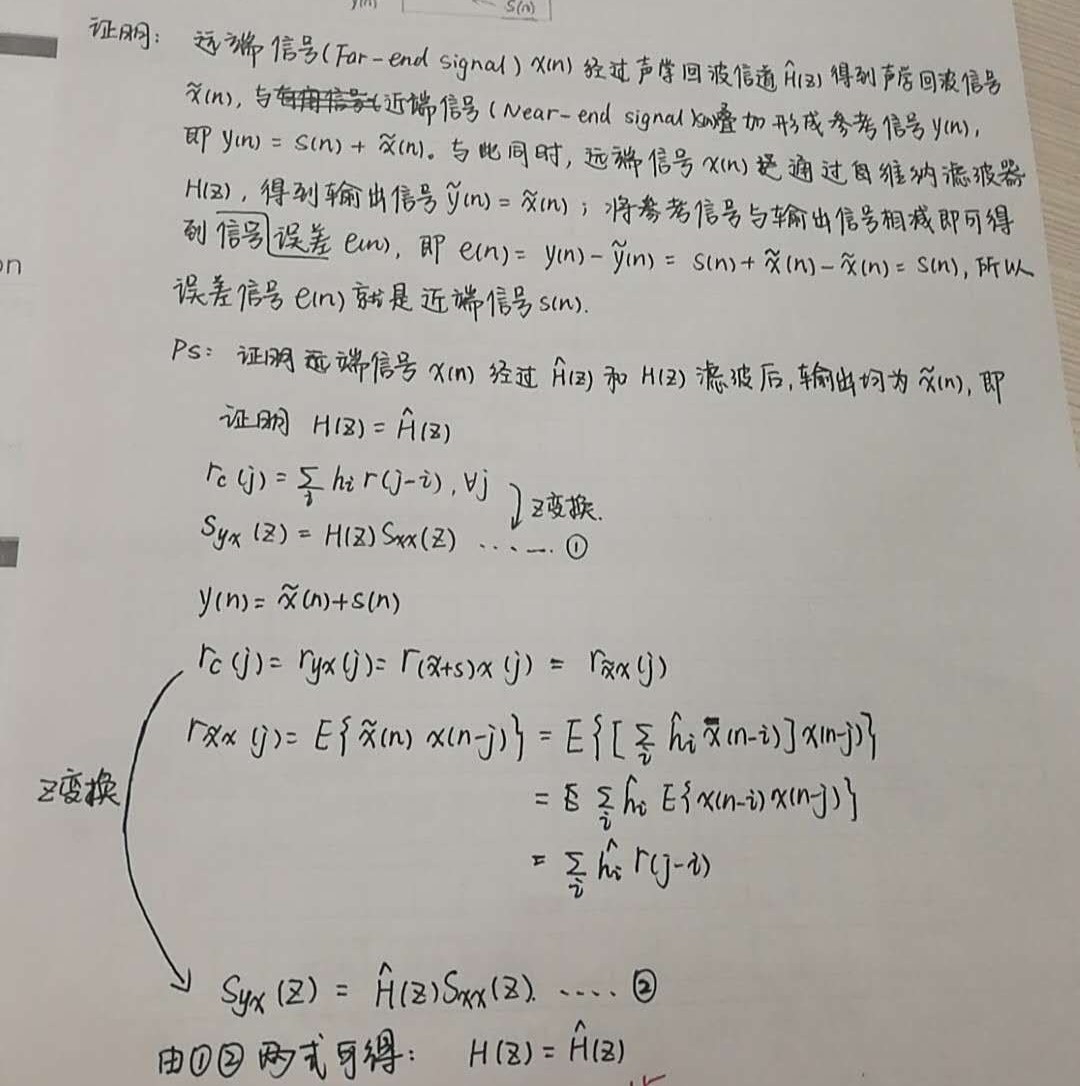
2.(2015大题2,2020大题1)声学回波抵消原理框图
3.(2018简答1)维纳滤波和卡尔曼滤波
维纳滤波和卡尔曼滤波是基于最小误差准则(MMSE)下的最优线性滤波,试解答以下问题:
(1)描述维纳滤波问题
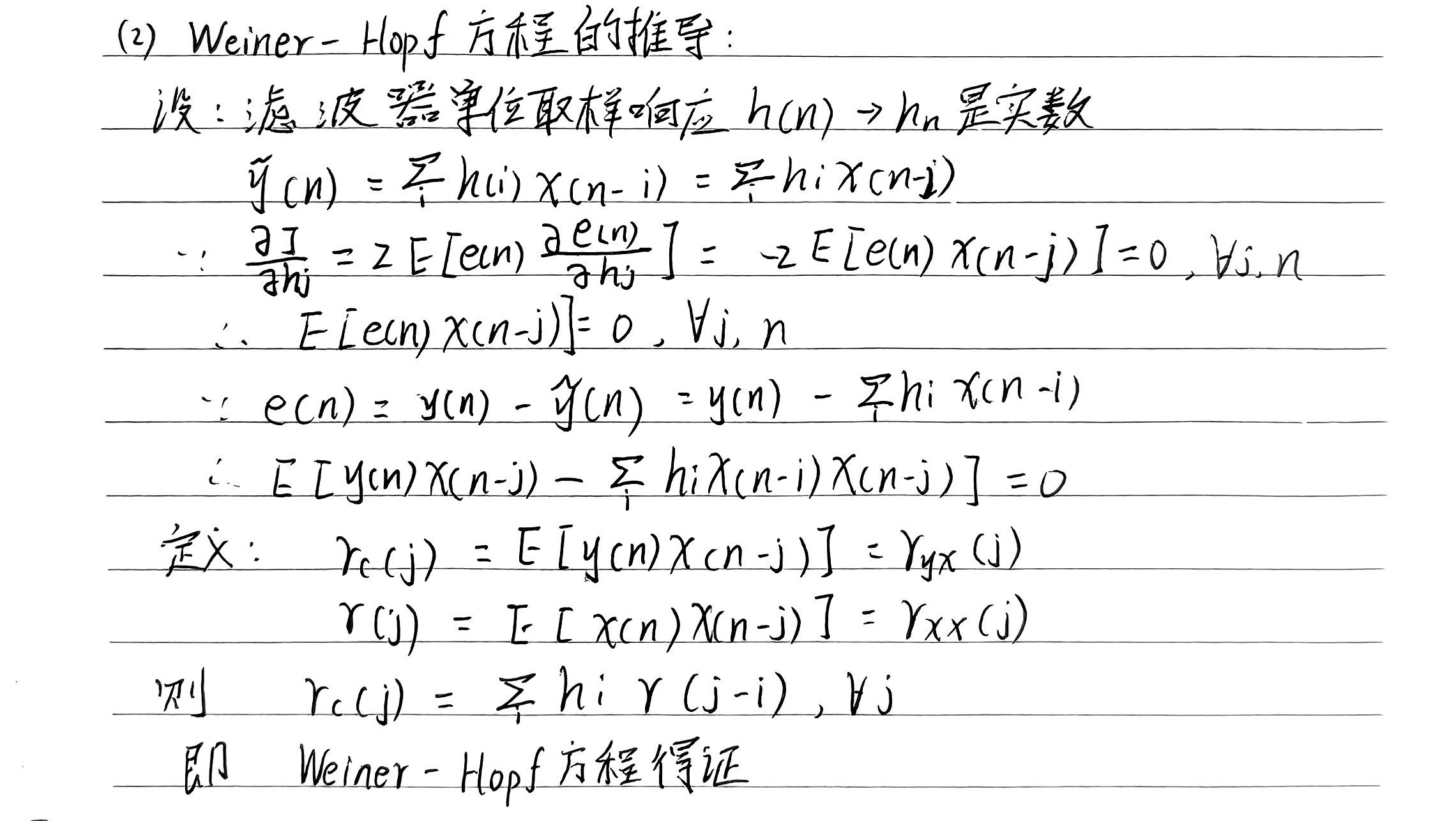
(2)推导求解维纳滤波的Winer-Hopf方程
(1)维纳滤波:在信号平稳,已知统计特性的先验知识下,采用最小均方误差准则的线性最优滤波
(2)
三、卡尔曼滤波(Kalman Filtering)
四、自适应滤波(Adaptive Filtering)
第二章 LMS自适应滤波
一、LMS算法
1.(2013简答3; 2014简答1;2020简答3)简要比较LMS和RLS的优缺点
1)LMS自适应滤波器
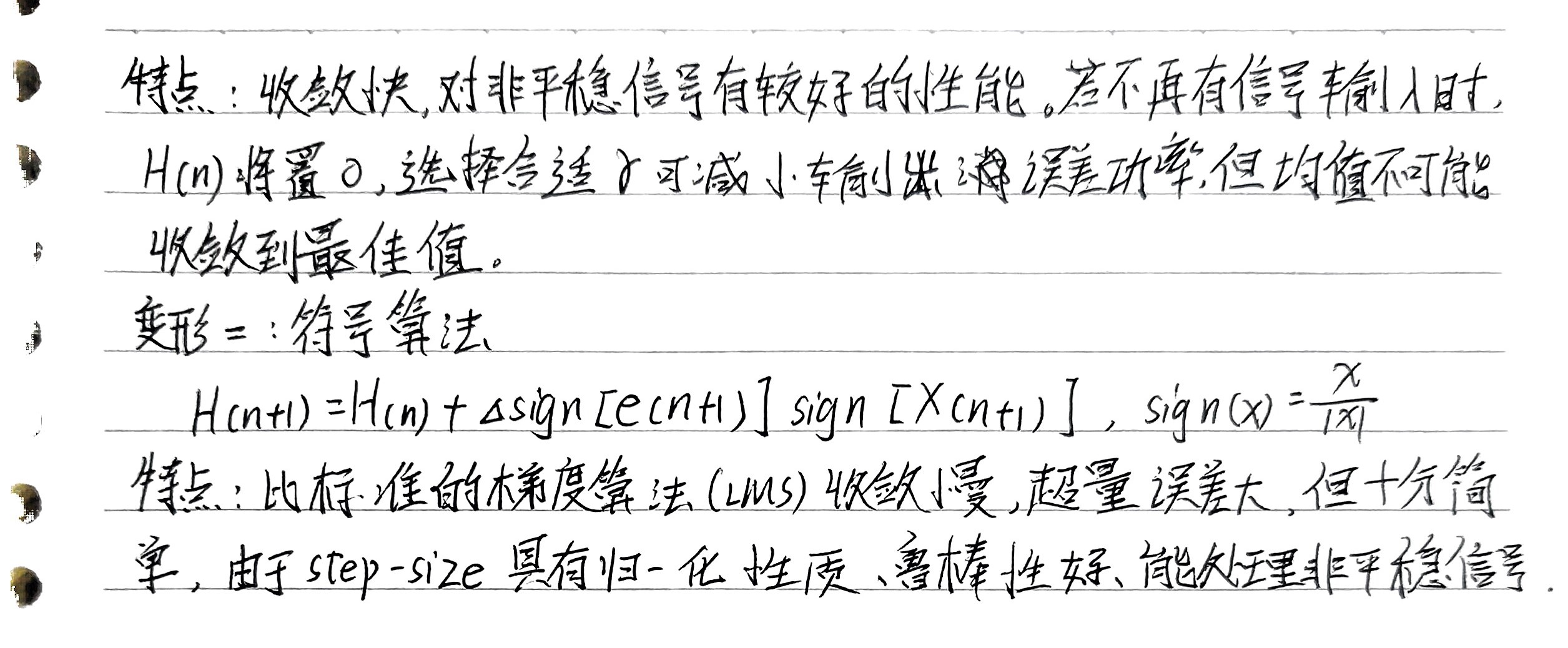
优点:计算量小,易于实现;不需要用到信号的先验统一信息以及不要求信号平稳,应用范围广。
缺点:LMS失调较大;在处理非平稳信号时存在较大的跟踪误差,难以协调失调误差和跟踪误差的矛盾,性能较差。
2)RLS滤波器
优点:收敛速度快,对于非平稳信号能够很好地跟踪;采用最小二乘准则,以误差的时间均值代替统计均值,失调误差比LMS小
缺点:每次迭代计算量大
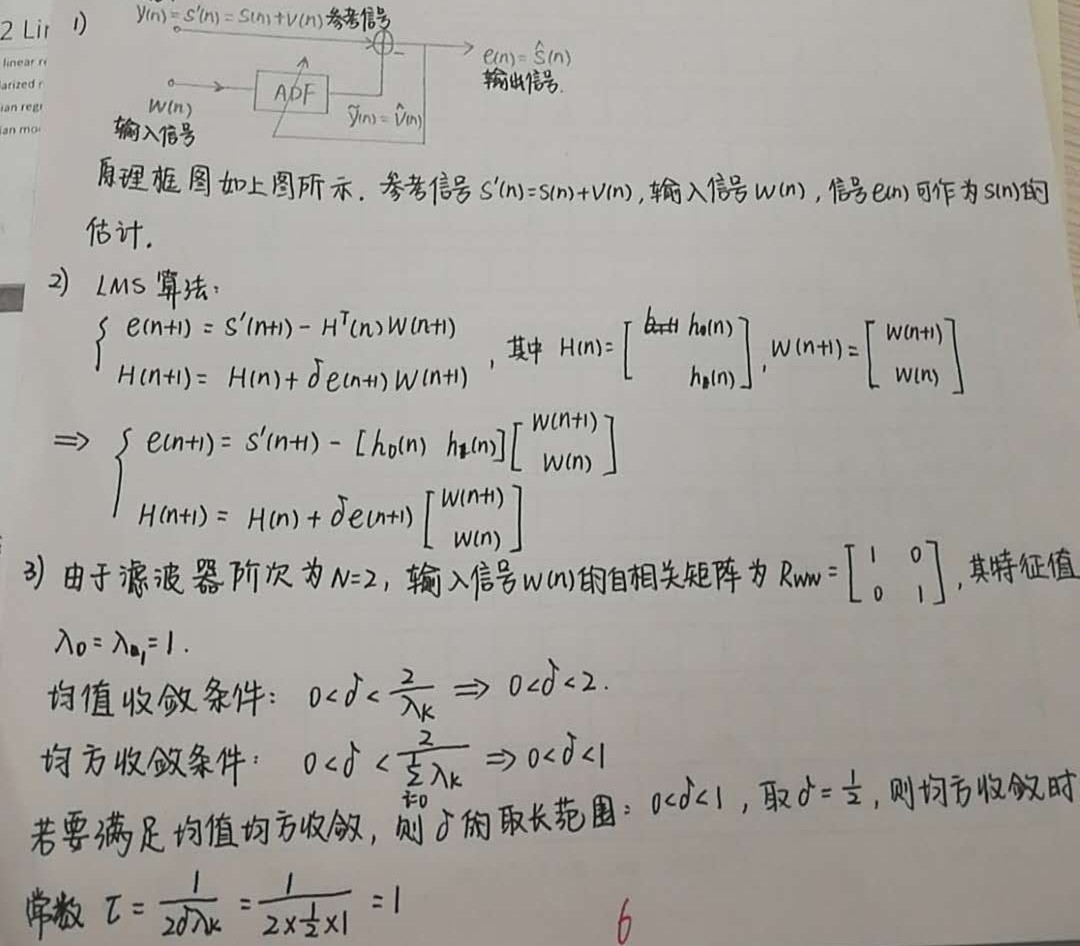
2. (2014大题2)对某信号s(n)进行观察,得到 s ′ ( n ) = s ( n ) + v ( n ) s^{'}(n)=s(n)+v(n) s′(n)=s(n)+v(n) ,式中 v ( n ) v(n) v(n) 是方差为1的零均值干扰信号,并通过某种方式获得 v ( n ) v(n) v(n)的观察信号 w ( n ) w(n) w(n), 均值为0,方差为1。
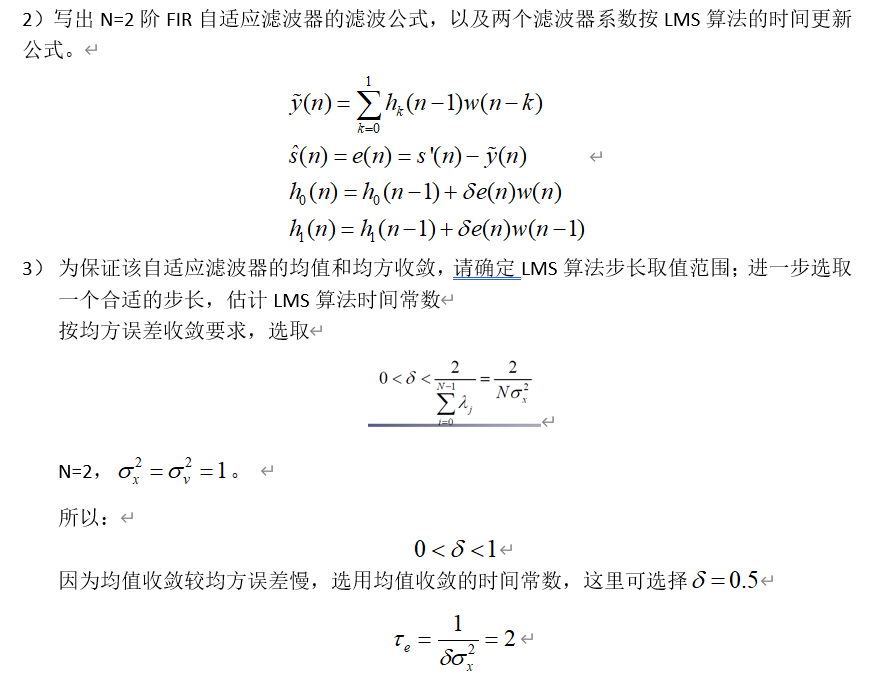
3.(2015大题1)设一个二阶FIR自适应滤波器


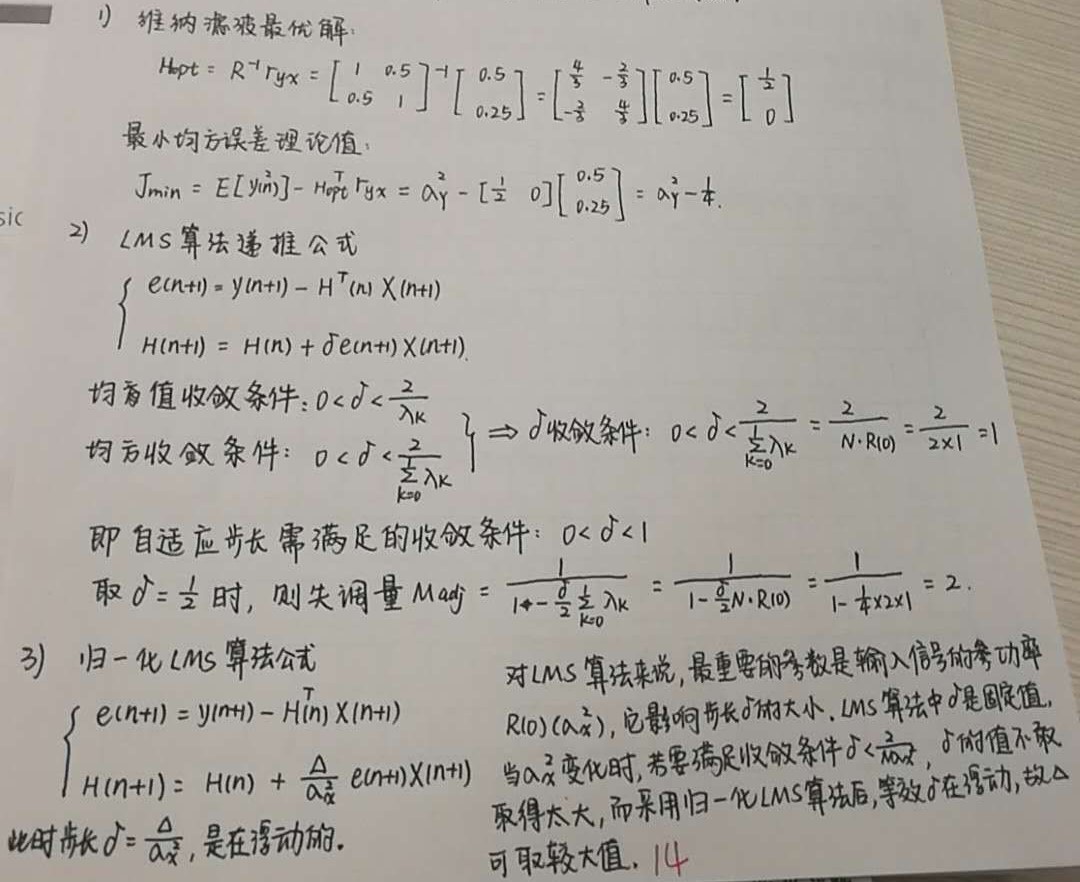
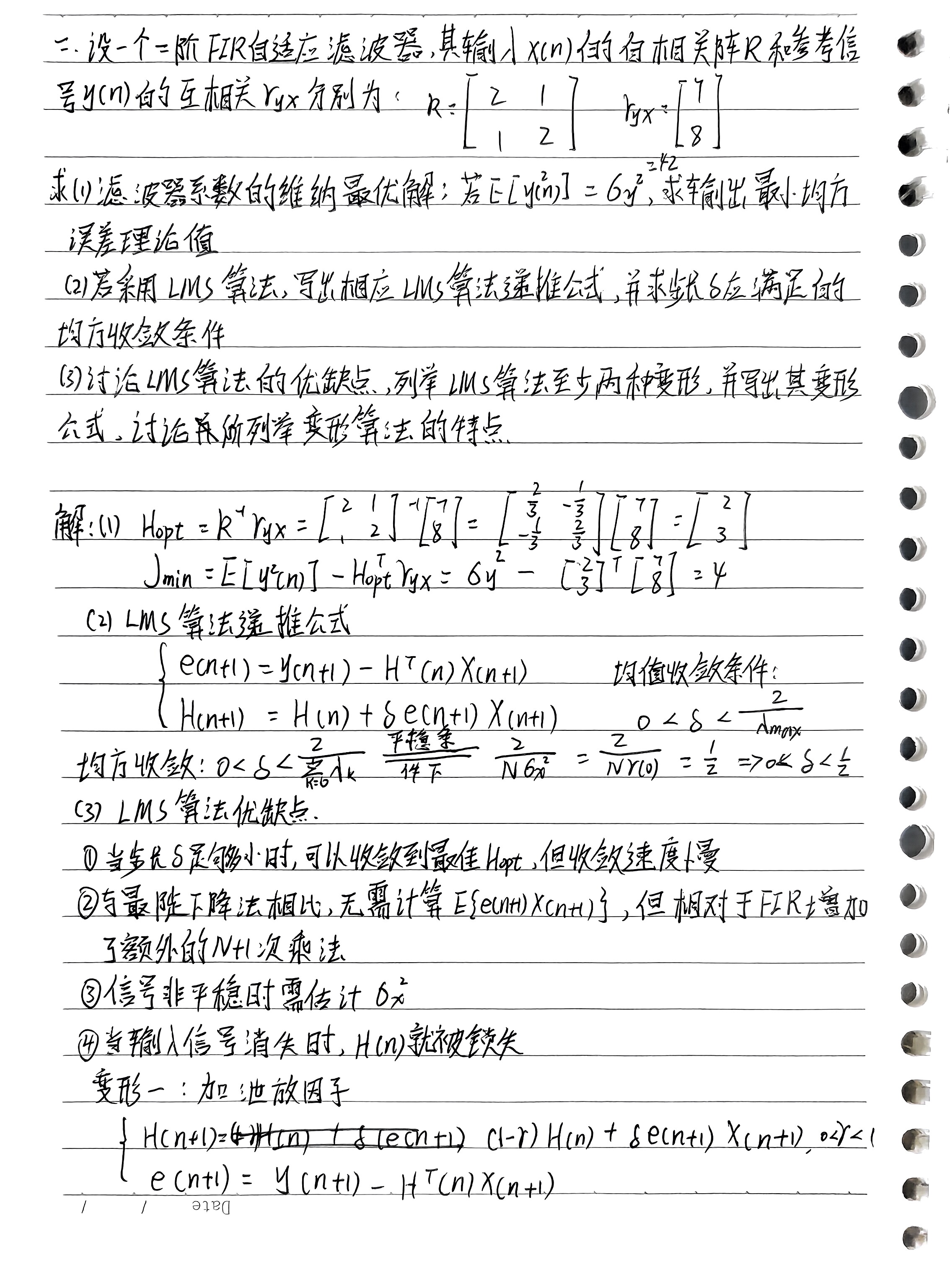
4.(2013大题1,2020大题2)设计一个二阶FIR滤波器
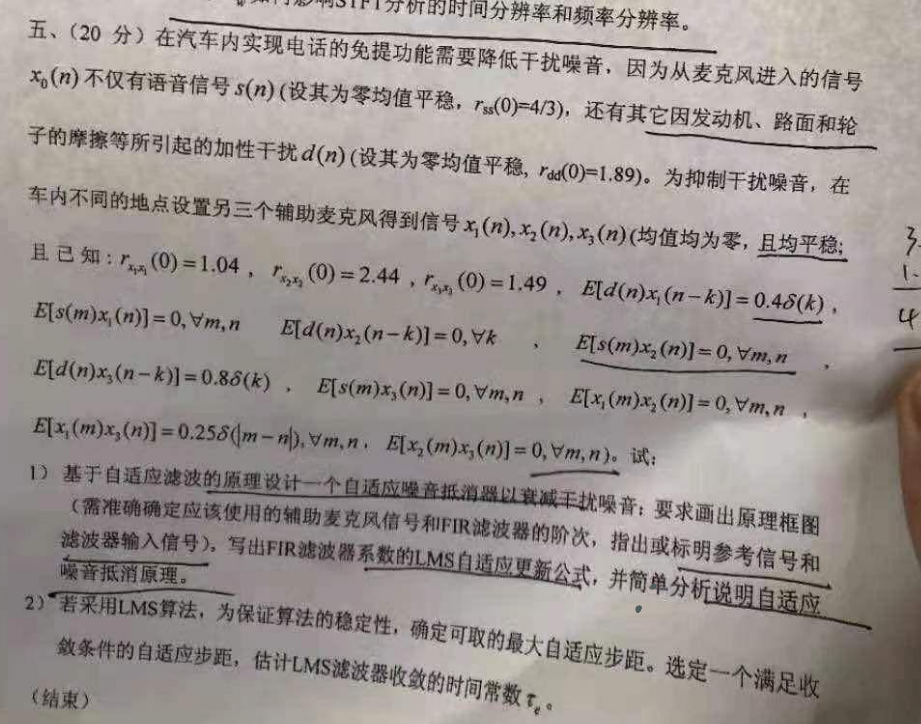
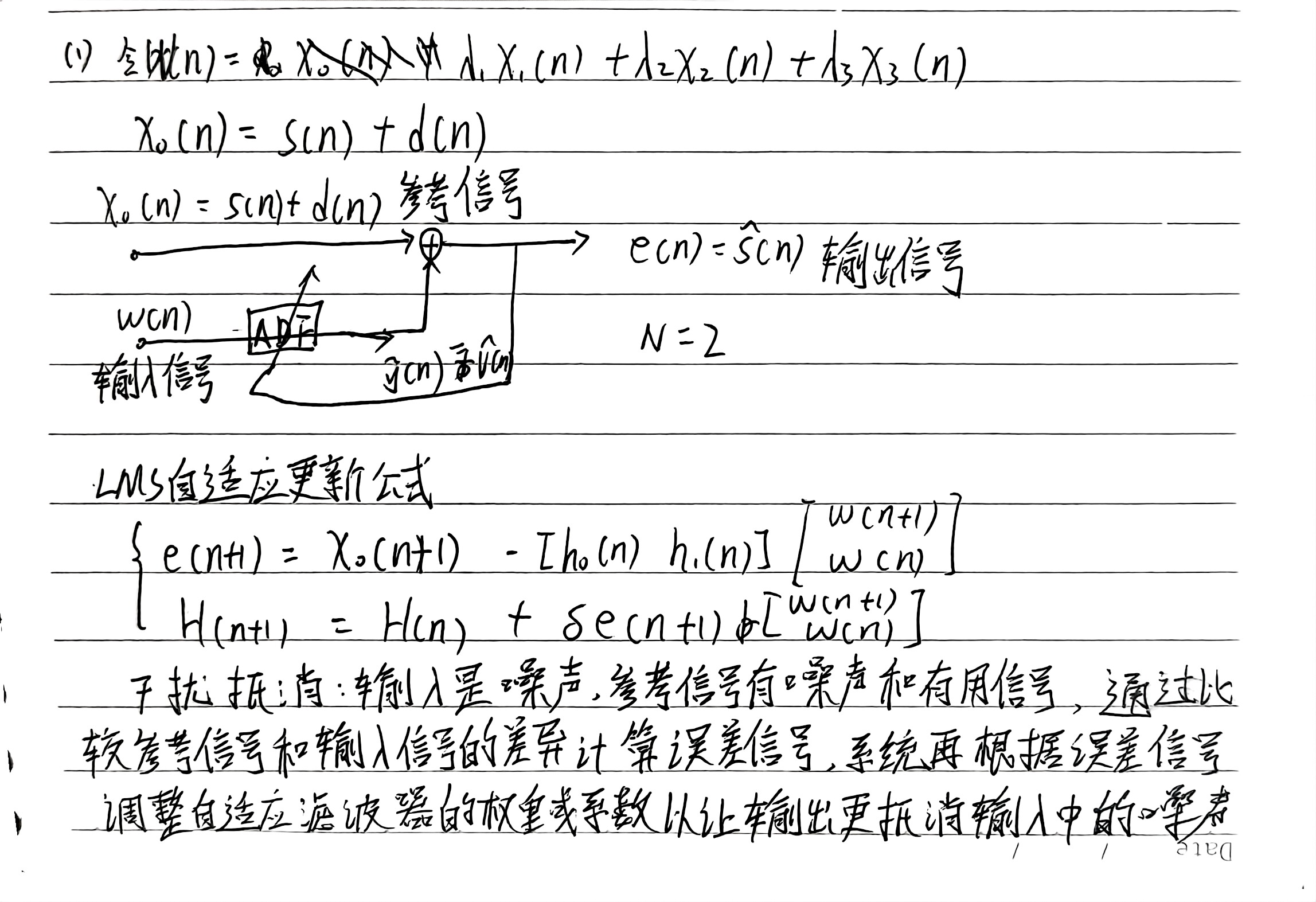
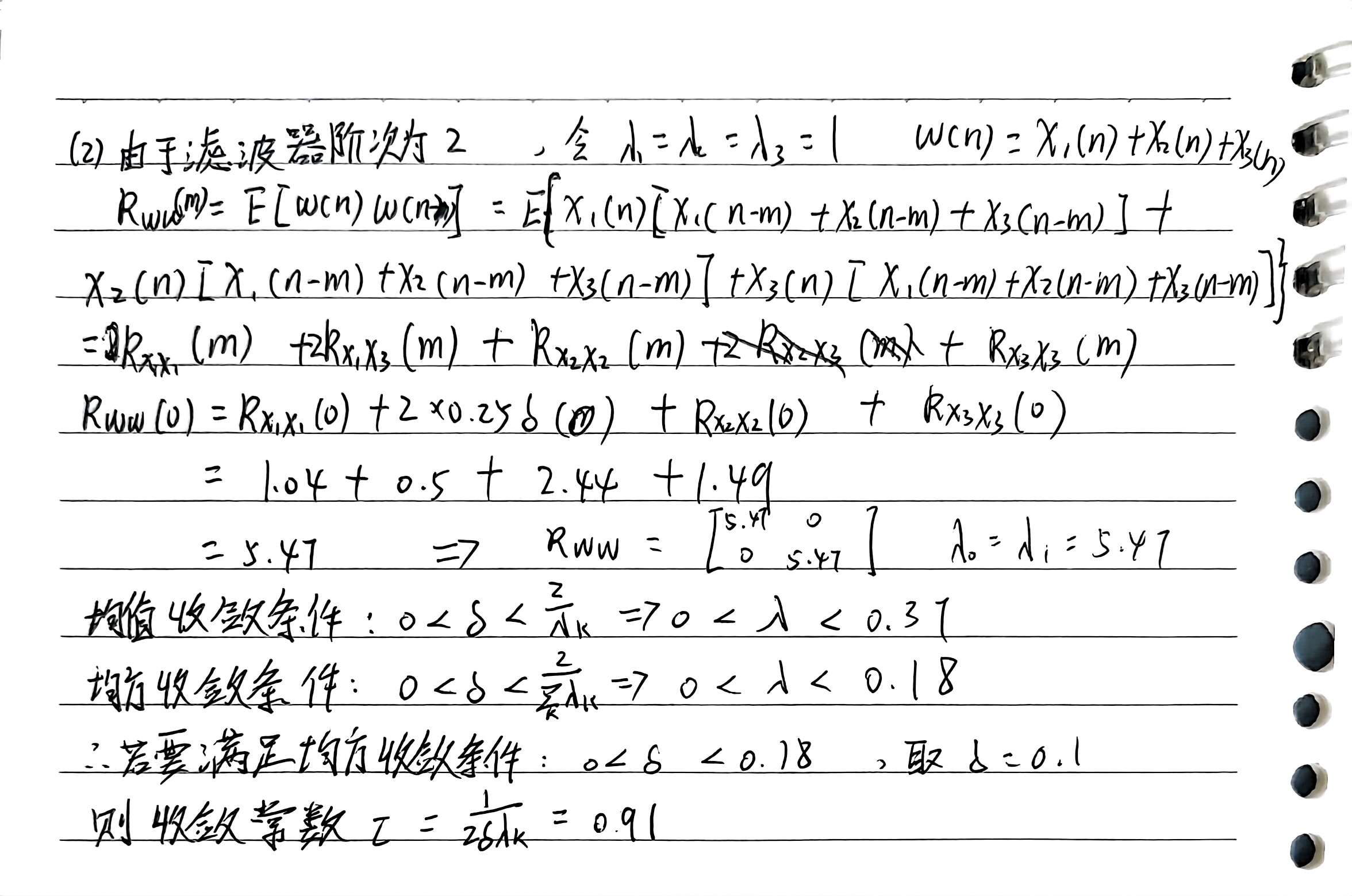
5.(2020大题4)在汽车内实现电话的免提功能需要降低干扰噪音
二、LMS算法稳定性分析
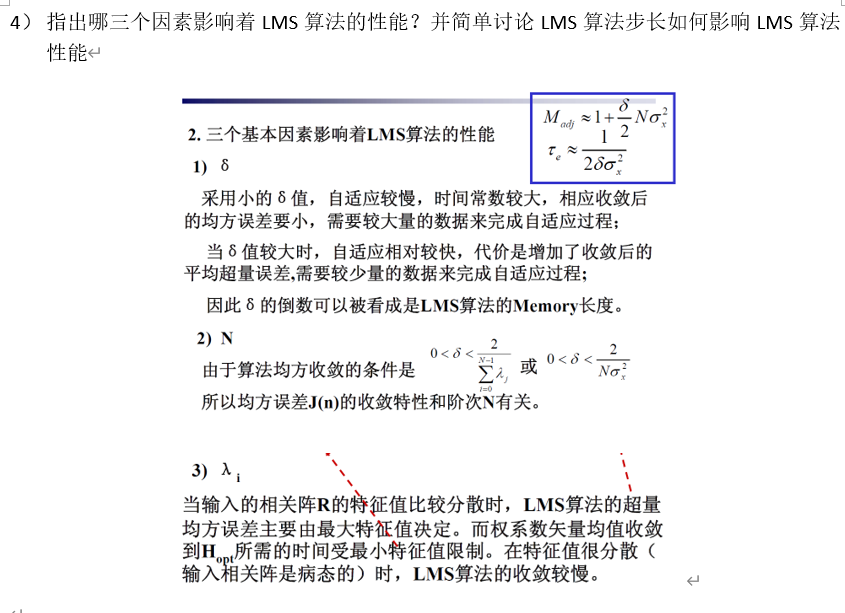
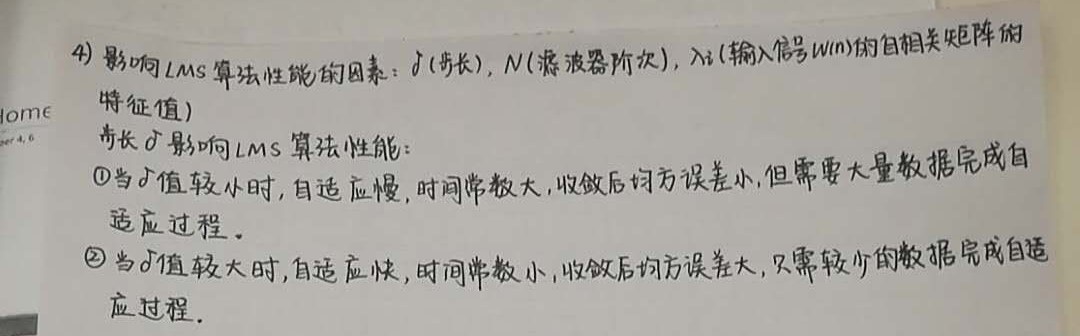
三、LMS算法性能分析
四、LMS算法变形
第三章 线性预测误差滤波
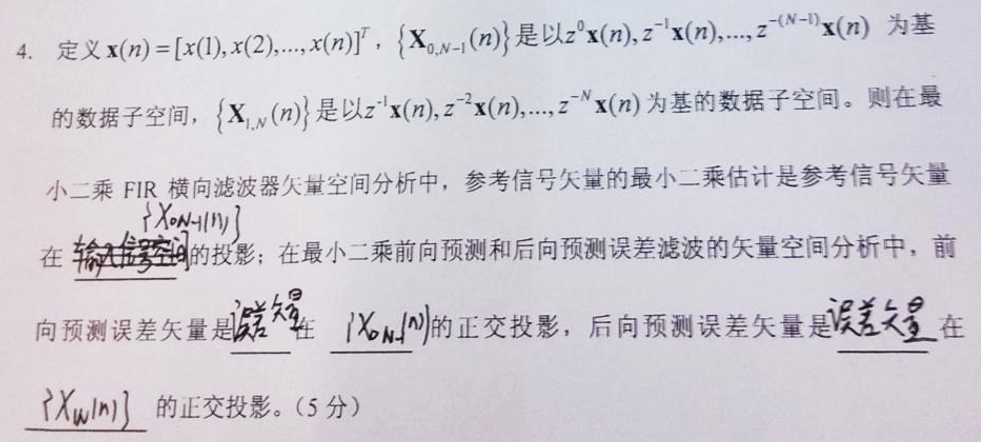
1.(2015填空4,2020简单4)定义 x ( n ) = [ x ( 1 ) , x ( 2 ) , . . . , x ( n ) ] T x(n)=[x(1),x(2),...,x(n)]^T x(n)=[x(1),x(2),...,x(n)]T
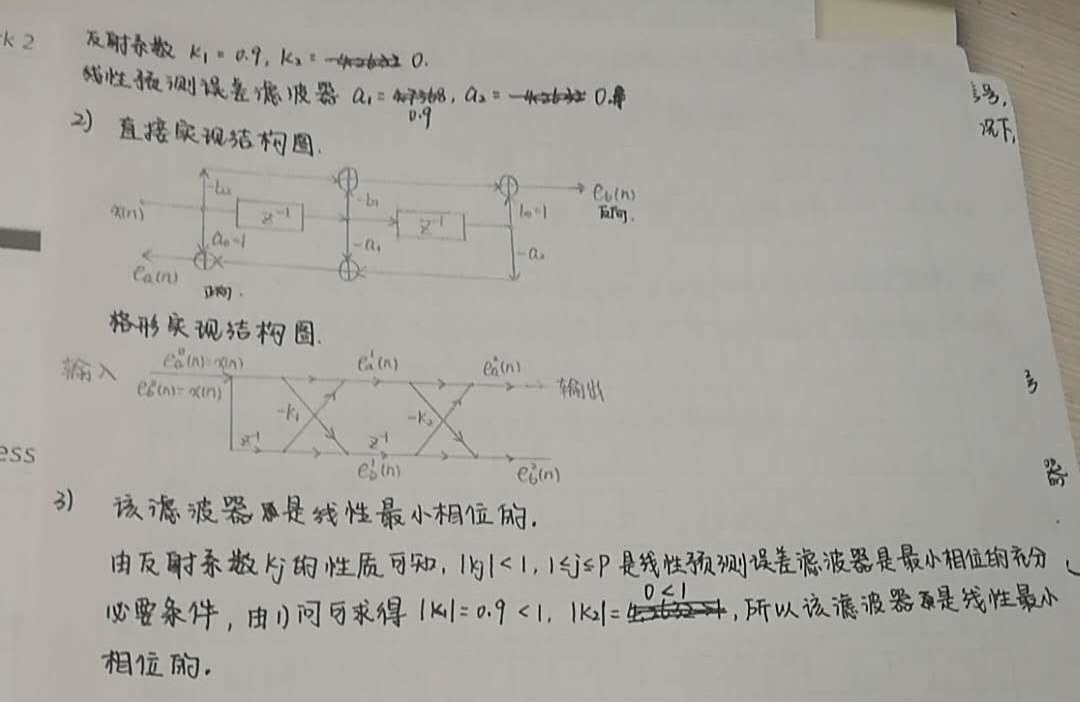
2.(2015大题3)x(n)是一个AR广义平稳的随机平稳过程,由以下差分方程产生: x ( n ) = 0.9 x ( n − 1 ) + v ( n ) x(n)=0.9x(n-1)+v(n) x(n)=0.9x(n−1)+v(n),其中,v(n)是零均值、方差为1的白噪声。若要用一个二阶FIR线性预测误差滤波器对信号x(n)进行线性预测误差滤波:
1.用Livinson-Durbin算法计算反射系数
k
1
,
k
2
k_1,k_2
k1,k2和FIR线性预测滤波器的系数
a
1
,
a
2
a_1,a_2
a1,a2;
2.画出线性预测误差滤波器的直接实现结构图和格形实现结构图;
3.该滤波器是最小相位的吗?根据反射系数的性质证明你的结论

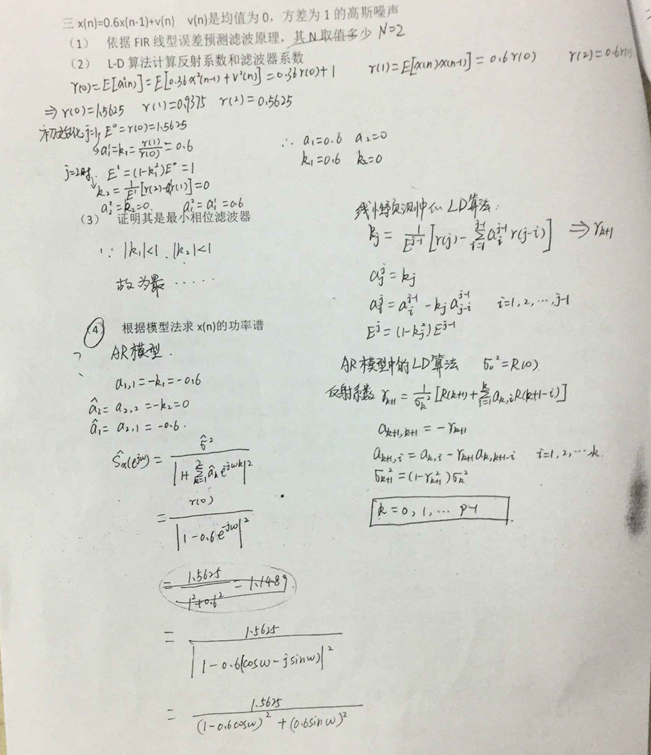
3.(2013大题2)x(n)=0.6x(n-1)+v(n) , v(n)是均值为0,方差为1的高斯噪声
(1)根据FIR线性误差预测滤波原理,其N取值多少
(2)L-D算法计算反射系数和滤波器系数
(3)证明其是最小相位滤波器
(4)根据AR模型法求x(n)的功率谱
第四章 短时傅里叶分析
1.序列 { x ( n ) } n ∈ Z \{ x(n)\}_{n \in Z} {x(n)}n∈Z的离散STFT定义为
序列
{
x
(
n
)
}
n
∈
Z
\{ x(n)\}_{n \in Z}
{x(n)}n∈Z的离散STFT定义为
X
(
n
,
k
)
=
∑
m
=
−
∞
m
=
+
∞
x
(
m
)
w
(
n
−
m
)
e
−
j
2
π
k
m
/
N
X(n,k)=\sum^{m=+\infty}_{m=-\infty}{x(m)w(n-m)}e^{-j2\pi km/N}
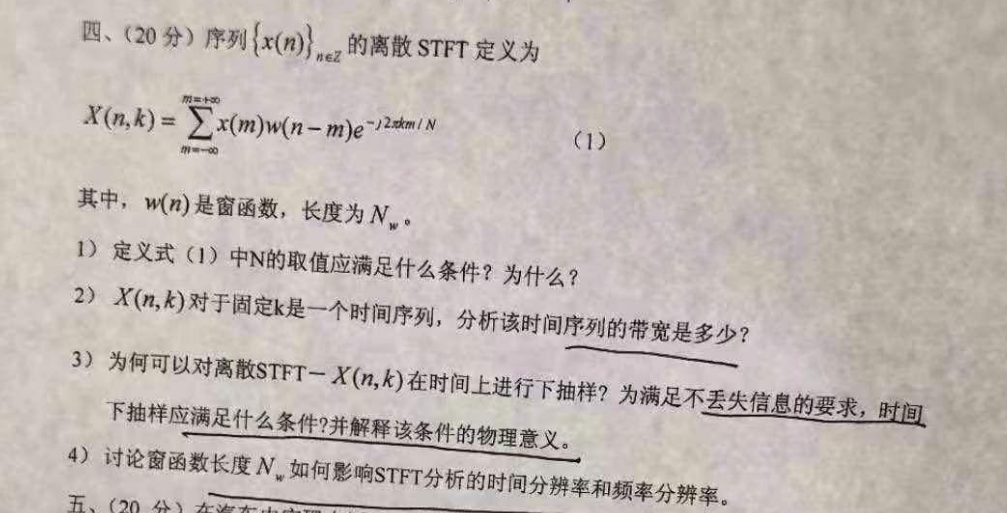
X(n,k)=∑m=−∞m=+∞x(m)w(n−m)e−j2πkm/N,其中w(n)是窗函数,长度为
N
w
N_w
Nw。
(1)定义式中N的取值应满足什么条件?为什么?
N
>
N
w
N>N_w
N>Nw
以覆盖x(n)在窗口内的整个信息,通常取N为窗口长度
N
w
N_w
Nw的倍数,以确保在频域获得足够的分辨率
(2) X ( n , k ) X(n,k) X(n,k)对于固定k是一个时间序列,分析该时间序列的带宽是多少?
(3)为何可以对离散STFT-X(n,k)在时间上进行下抽样?为满足不丢失信息的要求,时间下抽样应满足什么条件?并解释该条件的物理意义。
在离散STFT的上下文中,时间上的下采样是通过减小时间步长 n 的间隔实现的。这可以通过适当选择时间步长来实现。
为了不丢失信息,时间下采样应满足以下条件:
Δ
n
≤
N
2
B
\Delta n \le \frac{N}{2B}
Δn≤2BN,其中
Δ
n
\Delta n
Δn是时间步长
物理意义: 时间上的下采样意味着减少计算和存储需求,同时仍然保留信号的主要特征。条件
Δ
n
≤
N
2
B
\Delta n \le \frac{N}{2B}
Δn≤2BN 确保了采样定理的满足,防止了由于过低的时间采样率而引起的混叠效应。
(4)讨论窗函数长度
N
w
N_w
Nw如何影响STFT分析的时间分辨率和频率分辨率
窗函数长度 (N_w) 对STFT(短时傅里叶变换)分析的时间分辨率和频率分辨率都有重要影响。下面分别讨论这两个方面:
-
时间分辨率:
- 较小的 (N_w): 当窗函数长度较小时,窗口在时间轴上的宽度较短,因此能够提供较高的时间分辨率。这意味着STFT能够更好地捕捉信号中快速变化的瞬时特征。
- 较大的 (N_w): 随着窗口长度增加,窗口在时间轴上的宽度增加,导致时间分辨率降低。较大的 (N_w) 可能会导致对信号瞬时特征的较差捕捉。
-
频率分辨率:
- 较小的 (N_w): 小窗口长度有助于提高频率分辨率。较小的窗口能够更好地捕捉信号在频率上的快速变化,因此提供更好的频率分辨率。
- 较大的 (N_w): 随着窗口长度的增加,频率分辨率可能下降。这是因为在时域上较宽的窗口对信号中频率较高的成分可能表现出较差的敏感性。
第五章 现代谱估计
四、 参数模型化谱
1.(2014简答3,2015简答5)简单比较AR模型谱估计中模型参数估计的三种方法(自相关法,协方差法,Burg法)的优缺点
1.自相关法(Yule-Walker法)
计算效率高;由于数据加窗,导致精度下降,且假设未观测的数据为0
2.协方差法
自相关矩阵不具有Toplitz性质;存在稳定性问题,不能保证零点全在单位圆内
3.Burg法
避免前向使用已知数据两端以外的未知数据为0的假设,解决了自相关精度下降的问题;以前向和后向预测误差功率估计的平均值为最优准则,保证了预测误差滤波器的最小相位,即零点在单位圆内,系统稳定。
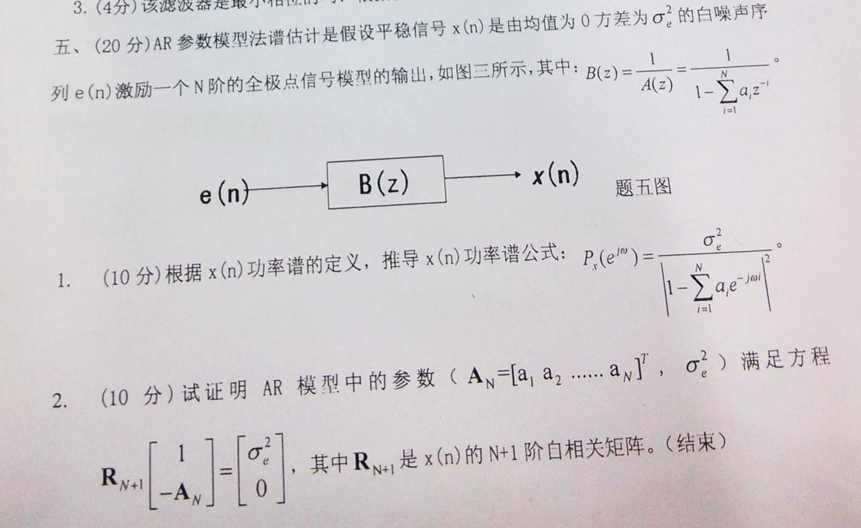
2.(2014大题3,2015大题4, 2020大题3)AR参数模型谱估计是假设平稳信号x(n)是由均值为0,方差为 a s 2 a^2_s as2的白噪声序列e(n)激励一个B(z)全极点信号模型的输出,如图所示
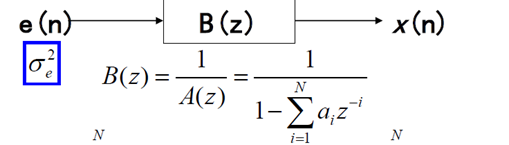
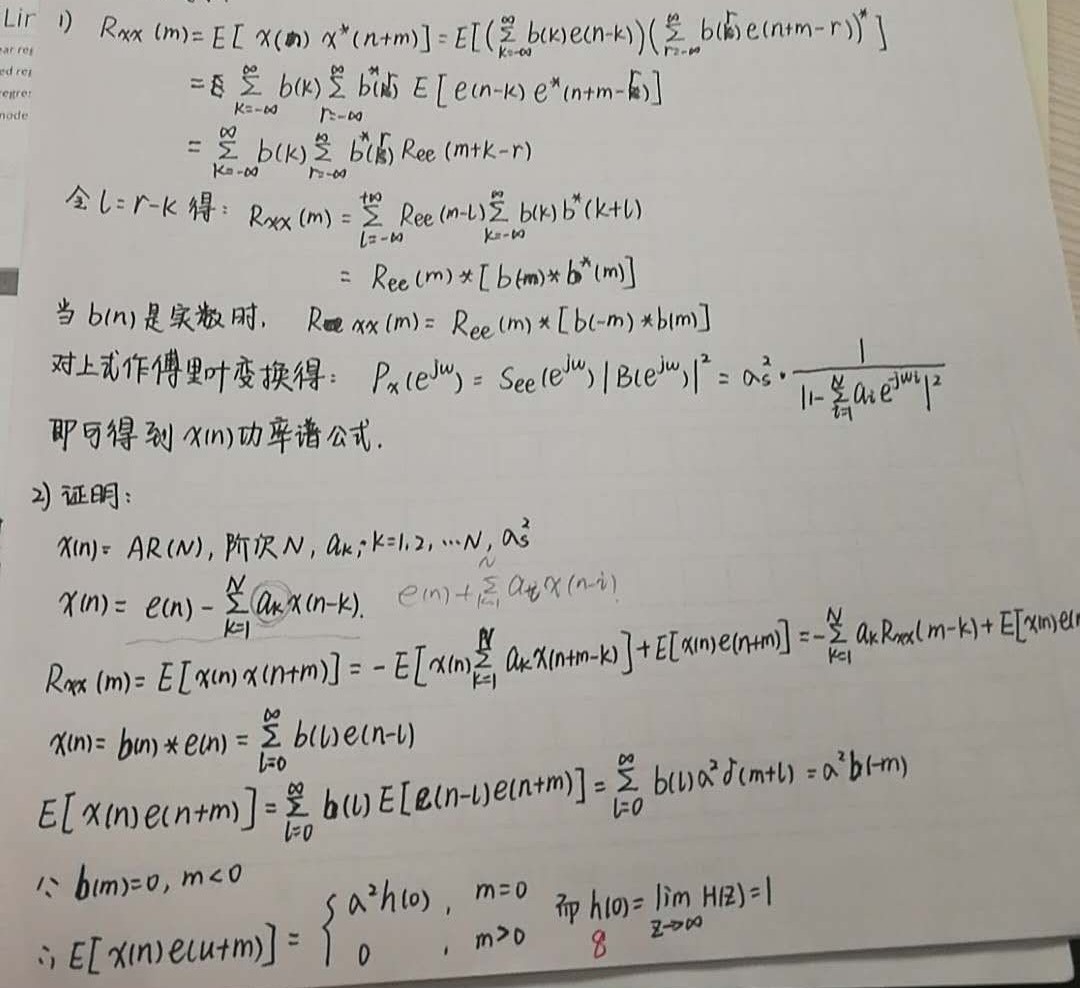
1) 根据x(n) 功率谱的定义,推导x(n) 的功率谱公式
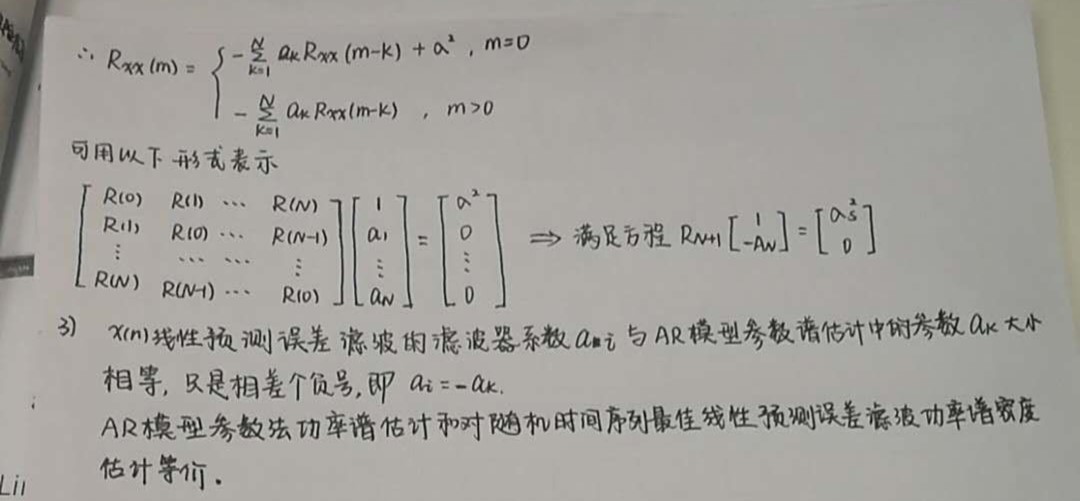
2) 证明AR模型中的参数满足Yule-Walker方程
3)2)的结果说明了x(n)的AR模型法参数估计和x(n) 的线性预测误差滤波之间是什么关系?
3.(2015填空3)参数模型法谱估计的步骤是
参数模型法谱估计的步骤是:一_____;二__________;三__________;AR参数模型法功率谱估计等价于_______________;MA参数模型法功率谱估计等价于__________。
确定模型;根据输入数据估计参数模型;根据估计参数计算功率谱;最大熵谱估计或线性预测误差滤波;直接法功率谱估计
4.(2020简答1)简述参数模型法谱估计的步骤
1.确定模型
2.根据输入数据估计参数模型
3.根据估计参数计算功率谱
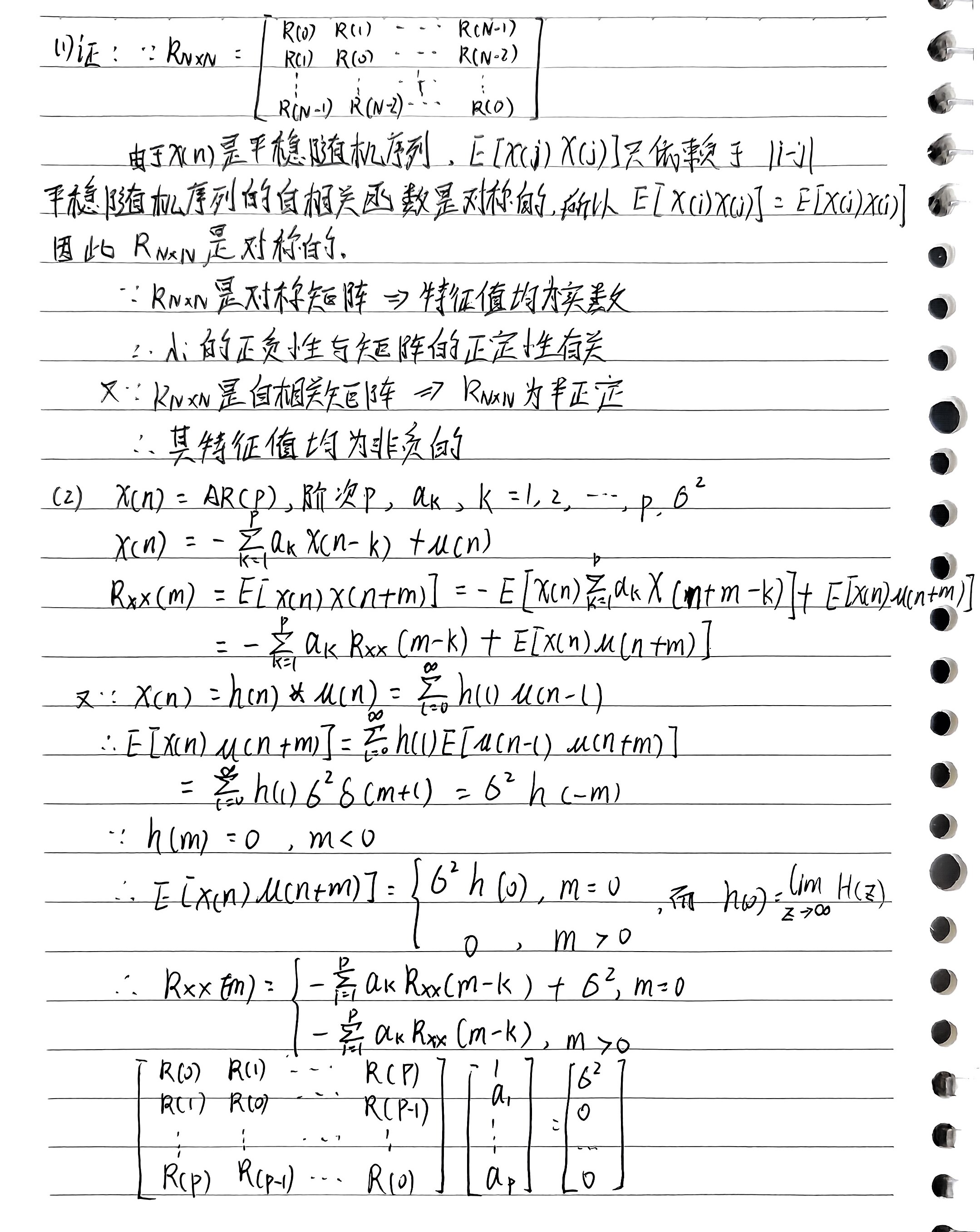
5.(2018题2)设x(n)是一半的平稳随机序列
设x(n)是一般的平稳随机序列,定义
X
(
n
)
=
[
x
(
n
)
,
x
(
n
−
1
)
,
.
.
.
,
x
(
n
−
N
+
1
)
]
T
X(n)=[x(n),x(n-1),...,x(n-N+1)]^T
X(n)=[x(n),x(n−1),...,x(n−N+1)]T,x(n)的自相关矩阵
R
N
×
N
=
E
[
X
(
n
)
X
T
(
n
)
]
R_{N\times N}=E[X(n)X^T(n)]
RN×N=E[X(n)XT(n)]。
(1)证明x(n)的自相关矩阵
R
N
×
N
R_{N\times N}
RN×N的任一特征值
λ
i
≥
0
(
0
≤
i
≤
N
−
1
)
\lambda_i \ge 0 (0 \le i \le N-1)
λi≥0(0≤i≤N−1);
(2)如果x(n)是一个全极点模型
A
R
(
p
)
=
1
1
+
∑
k
=
1
p
a
k
z
−
k
AR(p)=\frac{1}{1+\sum^p_{k=1}a_kz^{-k}}
AR(p)=1+∑k=1pakz−k1产生的零均值平稳随机时间序列,证明模型参数满足Yule-Walker方程:
R
(
p
+
1
)
(
p
+
1
)
[
1
,
a
1
,
a
2
,
.
.
.
,
a
p
]
T
=
[
σ
2
,
0
,
0
,
.
.
.
,
0
]
T
R_(p+1)(p+1)[1,a_1,a_2,...,a_p]^T=[\sigma^2,0,0,...,0]^T
R(p+1)(p+1)[1,a1,a2,...,ap]T=[σ2,0,0,...,0]T。其中
σ
2
\sigma^2
σ2是模型白噪声激励信号的方差。
五 白噪声中正弦波频率的估计
1.(2014简答题2)简述正弦波频率与幅度估计的信号子空间和噪声子空间两种方法的基本原理
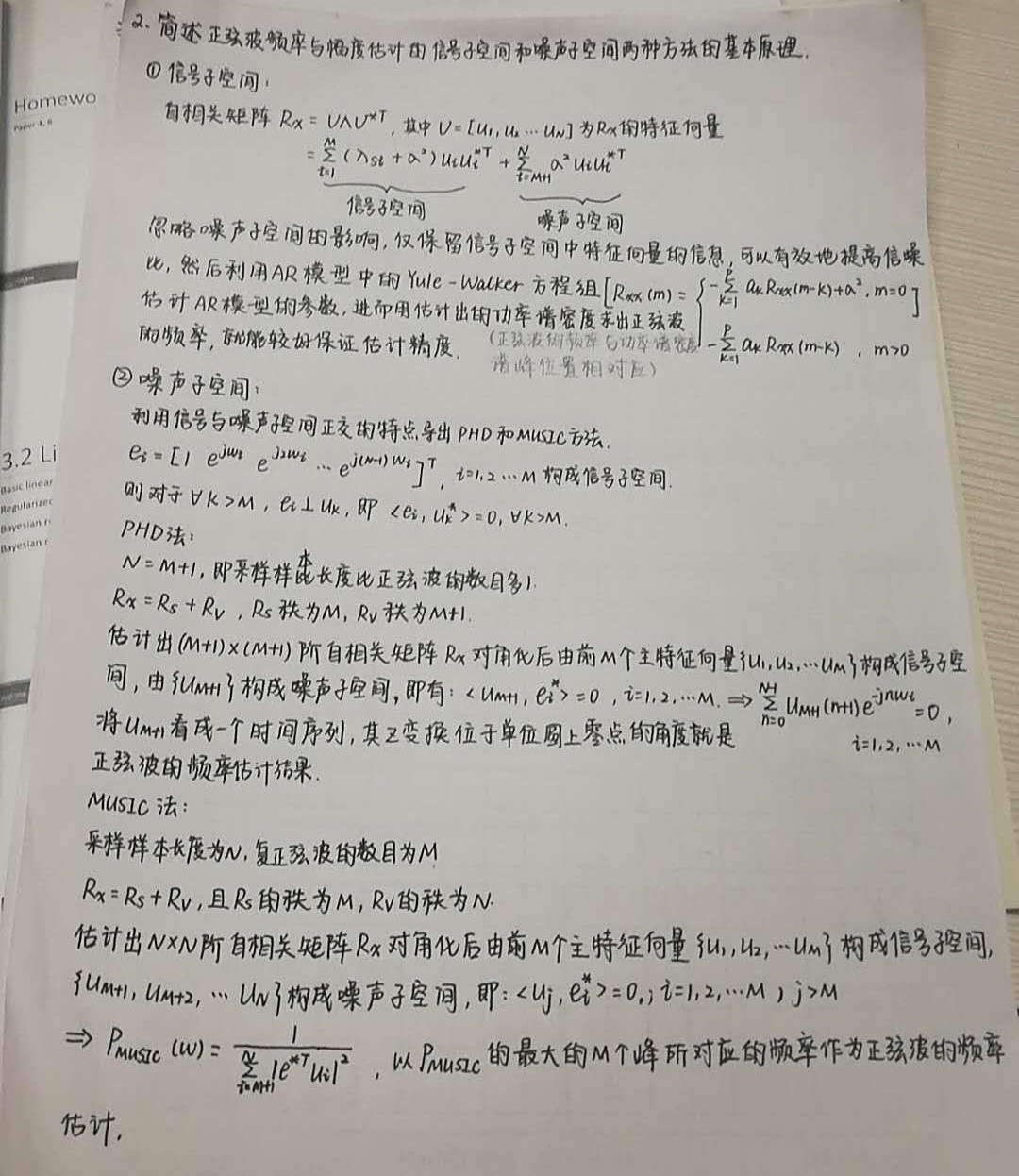
2.(2013简答2)在噪声中提取正弦信号,music方法的原理
第一问的部分答案
3.(2020简答2)估计淹没在噪声中的正弦波的频率和幅度,是信号处理中最有实际应用价值的技术之一。简述正弦波频率和幅度估计的多信号分类(MUSIC)算法的算法原理
第一问部分答案
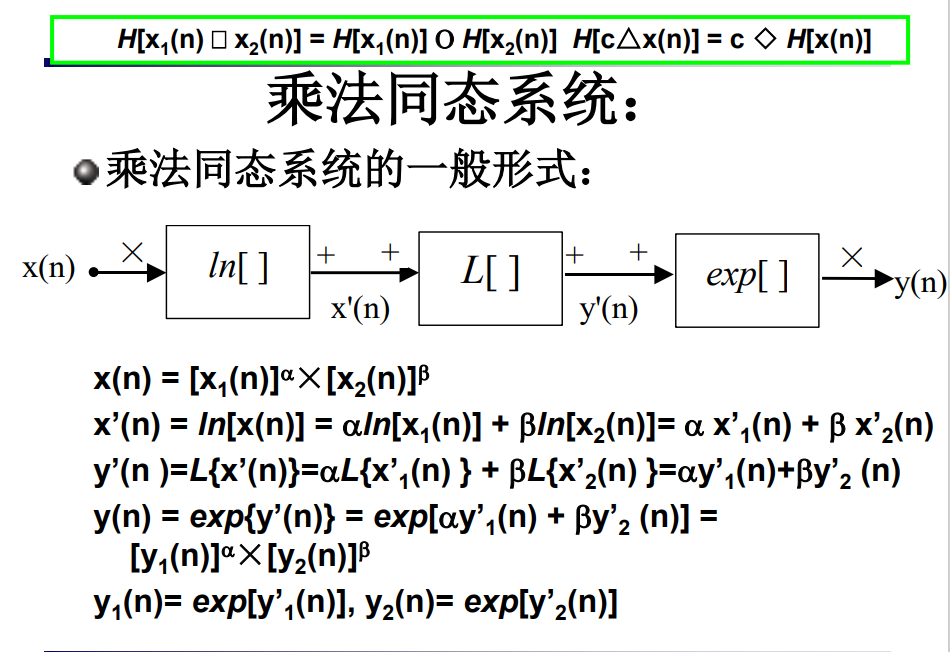
第六章 同态信号处理
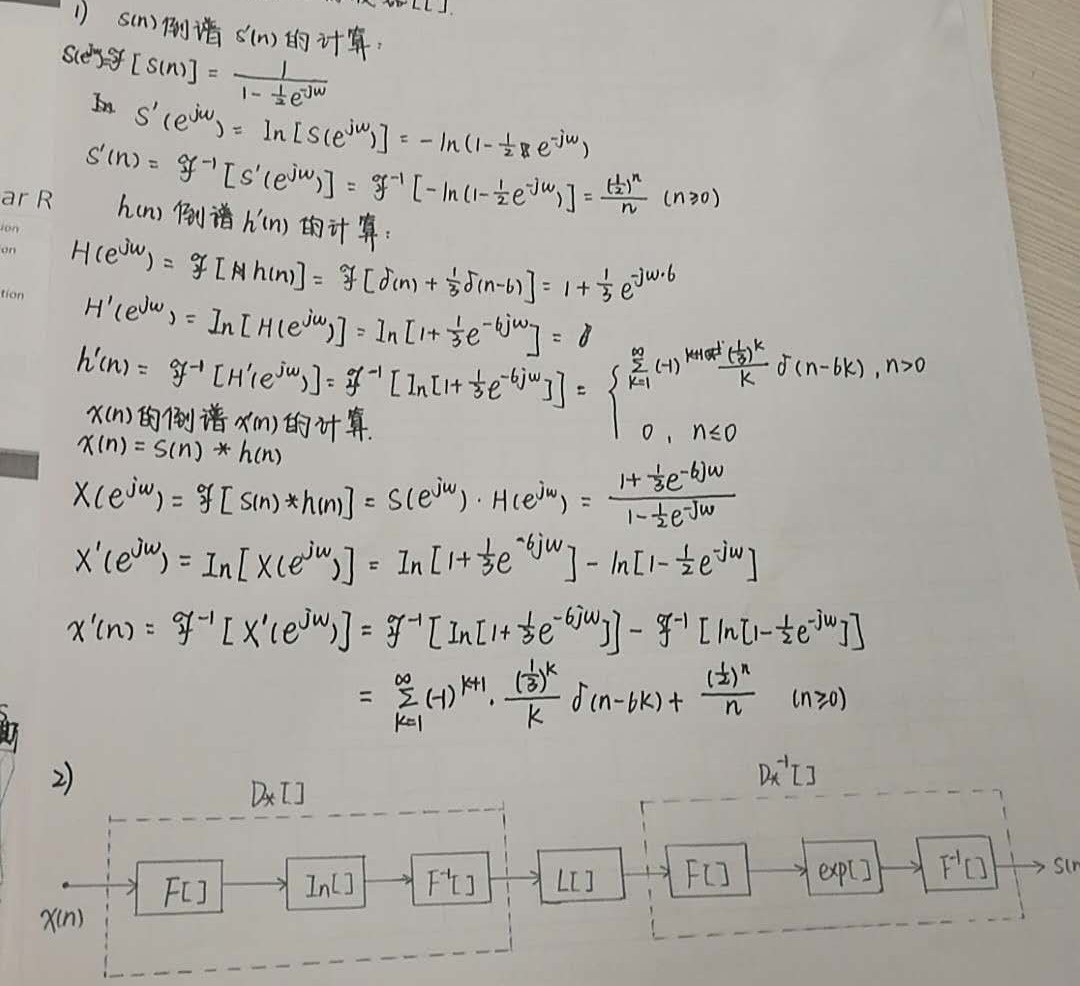
1.(2014大题4)设s(n),*表示线性卷积,从x(n)中提取有用信号s(n)

2.(2013简答4)列举最小相位信号的复倒谱的性质(至少2条),解混响中用到了复倒谱的性质的哪些?
1.全实性(All Real): 最小相位信号的复倒谱在频率轴上是全实的。这意味着在频率域中,最小相位信号的相位谱是单调递减的,没有频率上的波动。
2.非负性(Non-Negative): 复倒谱的模(magnitude)总是非负的。这表明最小相位信号的频域表示不会有频率上的幅度为负的部分。
解混响中用到了:
1.若x(n)为实序列,
x
′
(
n
)
x^{'}(n)
x′(n)也是实序列
2.最小相位序列的复倒谱为因果序列
3.即使x(n)为有限长的时间序列,x’(n)也总是无限长的时间序列
4.复倒谱的衰减速度很快,至少是以1/|n|的速度衰减
5.间隔
N
p
N_p
Np的冲激序列的复倒谱仍然是一个间隔为
N
p
N_p
Np的冲激序列
3.(2020大题4)在无线通信中,
(1)在无线通信中,接收信号不仅有直线传播到达的信号,也有通过各种发射物反射后到达的信号(多径信号),在有的应用中,需要尽量恢复原始信号(即直线传播的信号)。请你基于同态信号处理技术给出恢复原始信号的信号处理方案,所需条件自定
(2)对某信号s(n)进行观察,得到s’(n)=s(n)+v(n),式中,v(n)是方差为1的零均值干扰信号;并通过某种方式获得干扰信号v(n)的观察信号w(n),w(n)均值为0,方差为
σ
w
2
\sigma^2_w
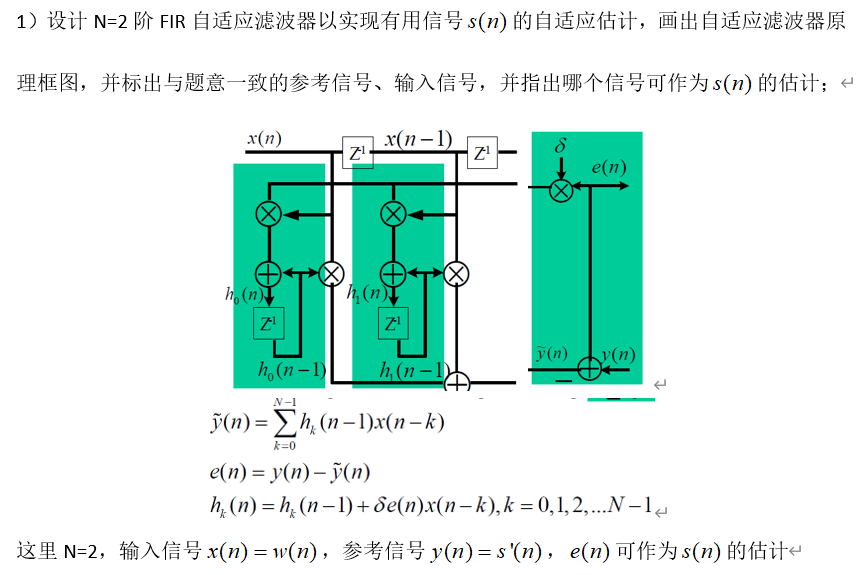
σw2。拟设计N阶FIR自适应滤波器以实现有用信号s(n)的自适应设计,请画出自适应滤波器的原理框图,并标出与题意一致额参考信号、输入信号,并指出哪个输出信号可作为s(n)的估计。
(1)
(2)
答案同LMS那一章(2015大题1)
第七章 最小二乘自适应滤波
1.(2018大题2)定义x(n)的最小二乘准则下
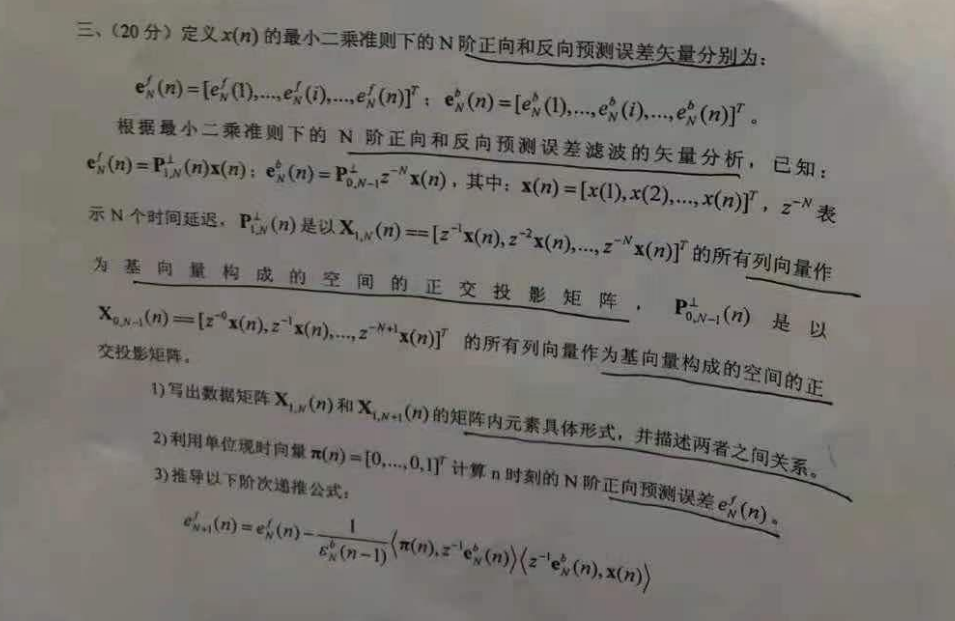

解:
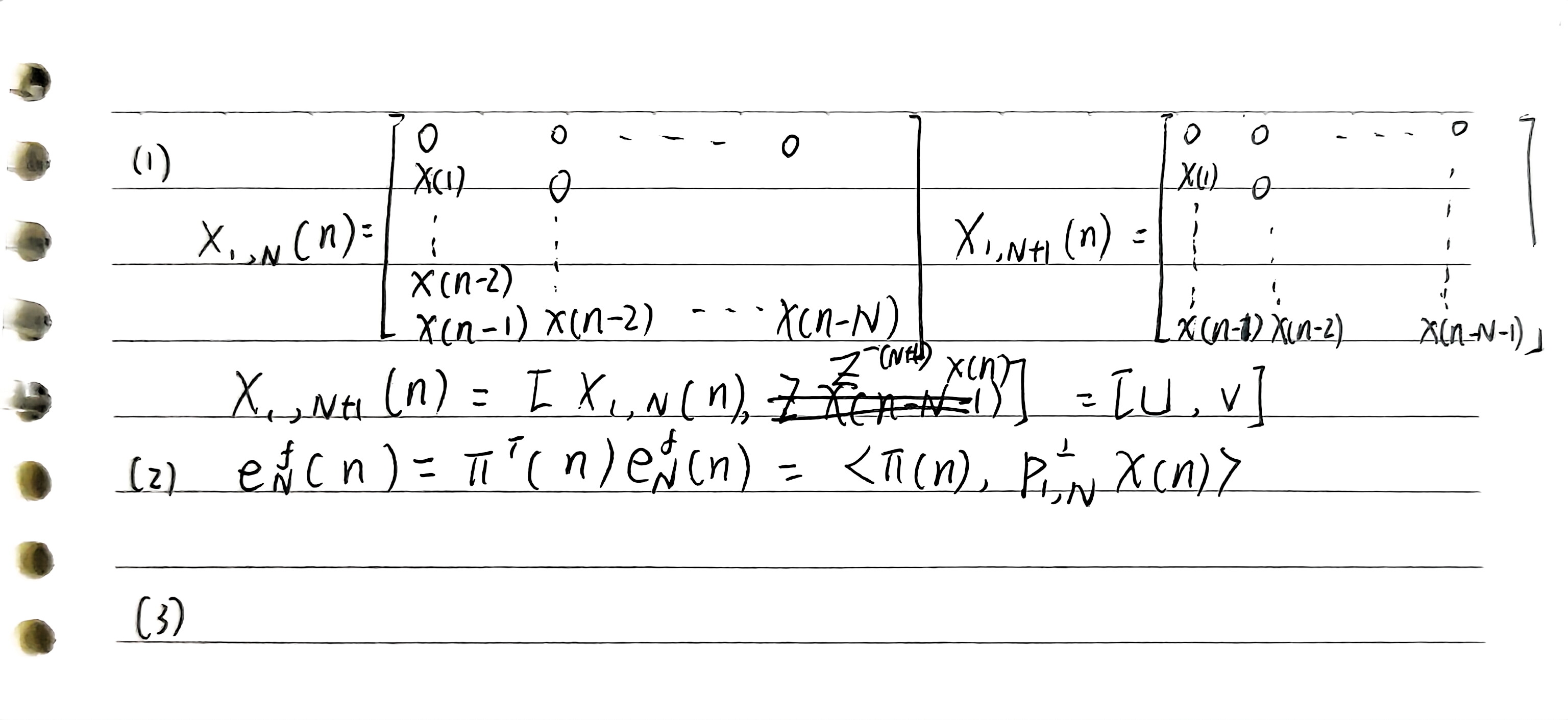
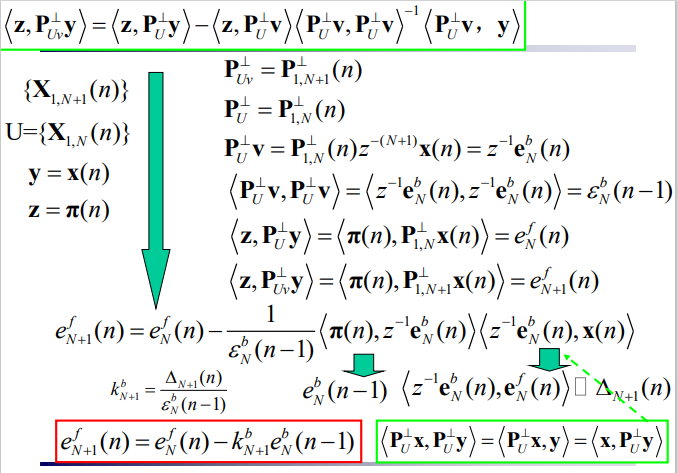
(3)















 3840
3840











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











