







Android手机上图像和IMU数据采集的方法
网上有相关的教程,但都讲的很模糊,而且不全,甚至还有人要收费。自己完整做了一遍发现还是有些麻烦,固记录下来供大家参考,希望能帮到大家、
采用开源库 VideoIMUCapture-Android
可同时采集图像和IMU数据并提供了标定脚本。点击上面链接,下载软件。
第一步:获取数据
我文末的参考博客里有从linux获取软件数据的方法,这里我介绍在windows上直接获取的方法(当然linux也可以这样)
从上面的github库里面获取apk文件进行安装,打开会得到这样一个界面,点击直接开始录制(如图)

录制完成的数据会储存在
/Android/data/se.lth.math.videoimucapture/files/YYYY_MM_DD_hh_mm_ss
当然,如果你点软件界面的感叹号,他告诉你的路径前面还有前缀 /storage/emulated/0/,这个只是值你的设备的主储存。
如果你通过手机文件管理器直接查看这个位置,很有可能看不到,这是Arduino11之后的权限问题。
最直接的方法,你直接将手机数据线连接到电脑上,在手机上选择usb传输模式为文件传输,这样你就可以在电脑端直接访问手机里的这个文件夹,如图

这里你就可以看到你在不同时间段录制的数据,直接就可以拿出来用

第二步:使用docker处理采集的数据
ubuntu18安装docker,参考链接:
ubuntu18.04上安装Docker
在linux下运行如下命令,获取 VideoIMUCapture-Android 的github库
git clone https://github.com/DavidGillsjo/VideoIMUCapture-Android.git
进入对应文件夹
cd VideoIMUCapture-Android/calibration
默认方法
在calibration文件夹下运行命令,
SUDO=1 DATA=<my-data-path> ./run_dockerhub.sh
这里<my-data-path>就是你放的 YYYY_MM_DD_hh_mm_ss 这样日期文件的上一级文件,比如我这里

替代方法
受限于docker不能连接了,可以用这个百度网盘的镜像文件:
链接: https://pan.baidu.com/s/1QO1WIby3vl4SAMvyu1qYUA 提取码: jwai
然后使用
docker load -i videoimucapture-calibration.tar
加载为docker中的镜像
修改脚本禁用自动拉取
编辑 run_dockerhub.sh,将 PULL=1 改为 PULL=0,避免重复尝试拉取:
PULL=0 USE_NVIDIA=0 IMAGE=davidgillsjo/videoimucapture-calibration ./…/libs/dockers/common/run.sh “$@”
然后还是执行
SUDO=1 DATA=<my-data-path> ./run_dockerhub.sh
执行完这个就进入了docker容器里面,进入Docker容器后,默认在calibration目录。这里的calibration目录是docker中的,里面是用于处理采集的数据的Python脚本,其实这个docker容器是配置好了kalibr库,就不用我们自己去编译安装这个库了。
第三步:标定相机
先在这个位置:https://github.com/ethz-asl/kalibr/wiki/downloads下载一个 April,用A4纸打印,贴到平整的墙面上,然后用上面的软件对着它简单录制几十秒的视频。
按照上面的方法,把数据转移到linux上
首先要处理一下采集到的数据,将数据转换为kalibr可处理的数据
执行命令
python data2statistics.py /host_home/<path-to-recording>/video_meta.pb3
这里<path-to-recording>就是<my-data-path>/YYYY_MM_DD_hh_mm_ss,比如我这

运行后会弹出这样的图片,关掉就好了

kalibr标定
运行命令
python data2kalibr.py /host_home/<path-to-recording> --tag-size <measured-april-tag-size-in-meters> --subsample 30
这里–tag-size表示我们自己打印的Apritag后,用尺子测量的一个二维码大小单位是m,–subsample为从.mp4文件中采样图片间隔,30表示每隔30帧采样一张。
比如我这

这个脚本执行完后,如上图,会在数据存储的目录生成一个kalibr目录,用于存储处理好的数据。
进入到kalibr目录
cd /host_home/<path-to-recording>/kalibr
执行标定命令
这里发布的topic是/cam0/image_raw
kalibr_calibrate_cameras --bag kalibr.bag --target target.yaml --models pinhole-equi --topics /cam0/image_raw
第四步:标定IMU
由于IMU的加速度计和陀螺仪有噪声和游走噪声,需要单独的标定,目前都是采用imu_utils库来标定。
首先我们要在Ubuntu中安装ros,并编译imu_utils。
ros的安装可以参考我的另一篇博客:
https://blog.csdn.net/qin_liang/article/details/127352107
imu_utils编译按以下方法
安装imu_utils
先安装依赖
sudo apt-get install libdw-dev
先编译code_utils
mkdir -p imu-calibration/src
cd imu-calibration/src
git clone https://github.com/gaowenliang/code_utils.git
cd ..
在code_utils下面找到sumpixel_test.cpp,修改#include "backward.hpp"为
#include "code_utils/backward.hpp"
再编译
catkin_make
cd src
git clone https://github.com/gaowenliang/imu_utils.git
cd ..
catkin_make
获取imu数据
这里我们用另一个App单独采集IMU数据,点击链接下载
Mobile AR Sensor (MARS) Logger
开始录制后,将手机平放在桌面上静止11分钟。(官方推荐2小时,我这里用11分钟先试一下)
采集的数据存储在手机的、Android/data/edu.osu.pcv.marslogger/files/data/路径,找的方法同上
存储的格式为
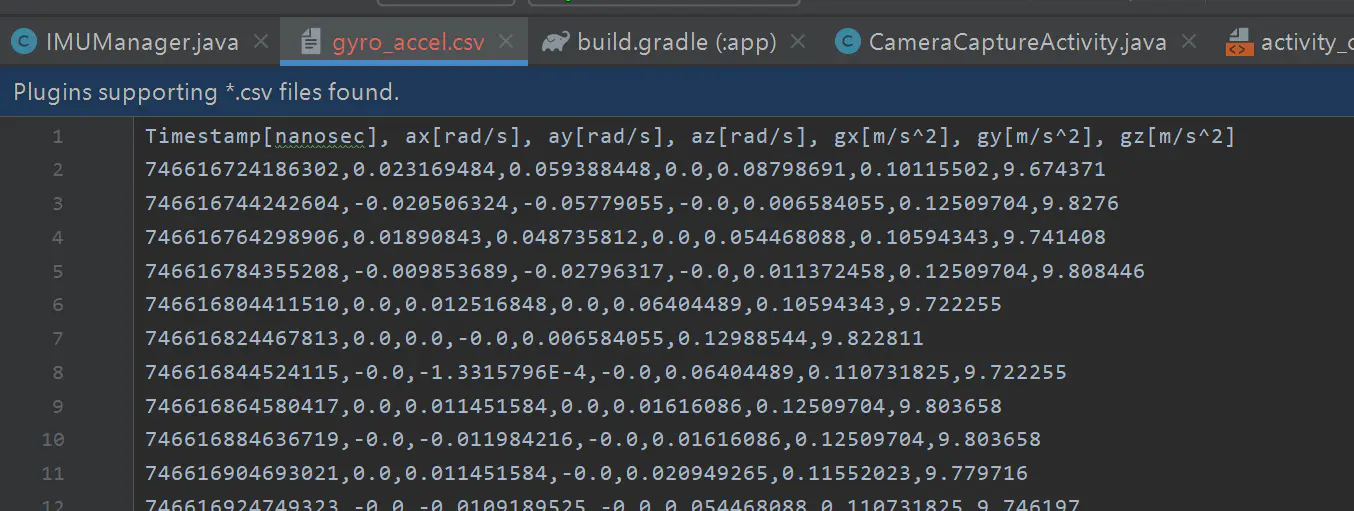
修改一下采集到的gro_accel.csv的第一行为如下图所示,并改名成imu0.csv

将imu.csv转化为ros.bag
在doker环境下的kalibr文件夹下运行命令(根据自己的imu数据存放位置改,bag包名字可以改)
kalibr_bagcreater --folder /host_home/dataset/imu/ --output-bag imu.bag
比如我的

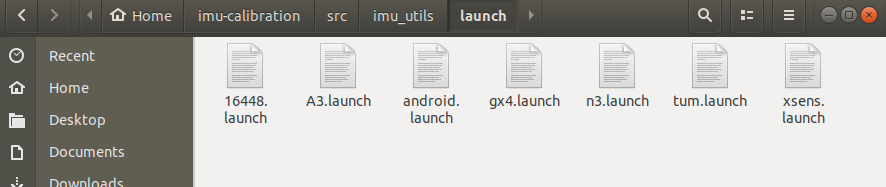
创建launch文件
打开之前miu_utils下的lauch文件夹,创建android.launch
里面内容如下:
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/imu0"/>
<param name="imu_name" type="string" value= "onePlus7"/>
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/>
<param name="max_time_min" type="int" value= "11"/>
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>
imu_name可以自定义,比如我的是onePlus7
max_time_min表示采集imu的数据的时间,建议2个小时,单位是分钟,我这里只采集的11分钟
启动标定
如果下面的命令执行出错,可以先在imu_utils所在的空间下,执行catkin_make。如果是按照我之前的方法安装的imu_utils就是如下

在launch对应的文件夹下打开终端
输入命令(这里根据你imu_utils所在的位置更改)
source ~/imu-calibration/devel/setup.bash
再执行命令
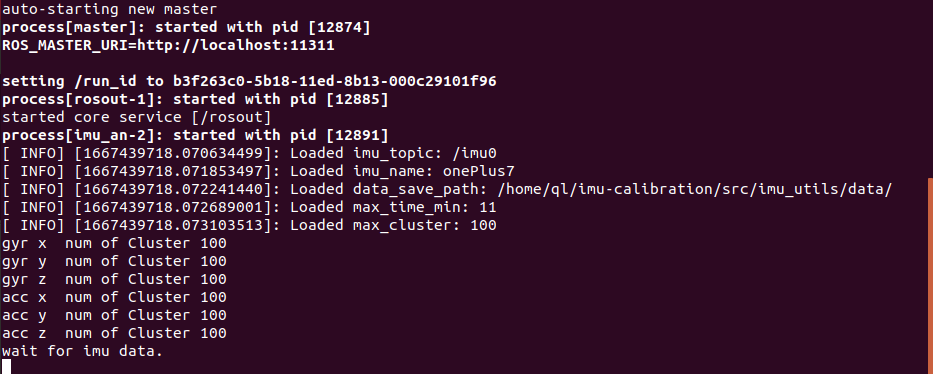
roslaunch imu_utils android.launch
此时程序会进入等待话题的状态
这时打开之前转化的.bag包的位置,执行命令(bag名自己改)
rosbag play imu.bag
你也可以使用以下命令,以200倍速度播放
rosbag play -r 200 imu.bag
要是这里失败了就重新生成imu.bag
终端会开始读取数据

运行lauch的终端出现这个done的时候,就完成了标定(我当时只运行到log file的位置,等了一段时间还没结束,我看文件已经生成了就直接ctrl+C结束了终端,最后也显示了done)
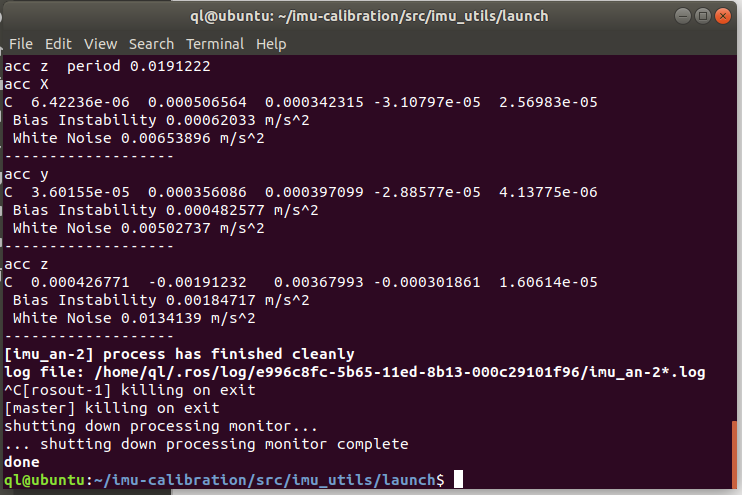
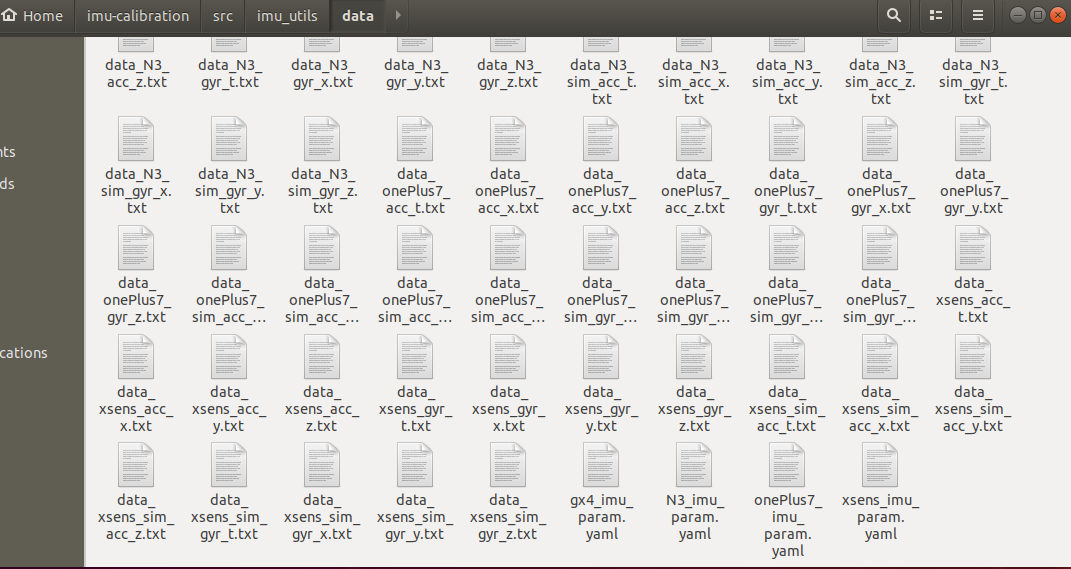
完成后,你就可以在imu_utils的data文件夹下看到生成的标定文件
第五步:相机和IMU融合标定
相机和IMU融合标定是ApilTag不动
按照https://github.com/ethz-asl/kalibr/wiki/camera-imu-calibration 给的方式采集数据。
首先通过python data2kalibr.py 处理记录的数据,
python data2kalibr.py /host_home/<path-to-recording> --tag-size 0.025 --subsample 3 --kalibr-calibration <calibration-result-dir>/camchain-kalibr.yaml
这里 --kalibr-calibration指向我们在相机标定步骤生成的标定文件
比如我这

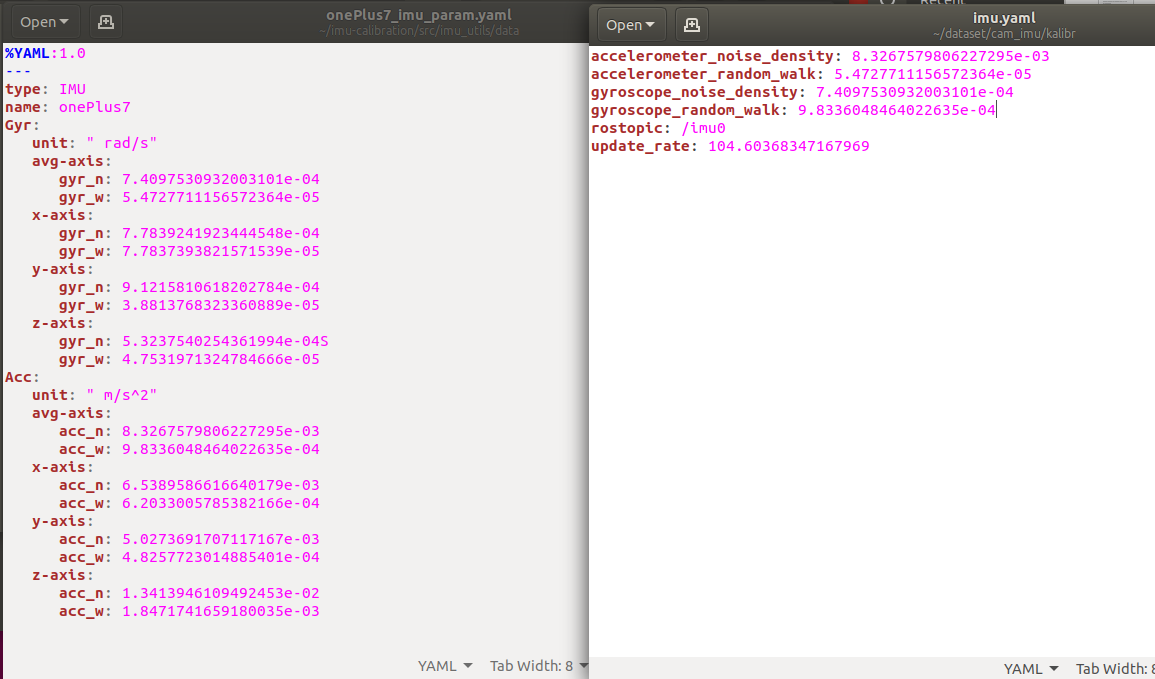
把我们之前标定的IMU数据中对应项(avg)填到到imu.yaml中(前面标定的IMU数据用的缩写)
然后改了一下rostopic,我的修改如下
切换到kalibra文件夹后再执行
cd <path-to-recording>/kalibr
kalibr_calibrate_imu_camera --target target.yaml --imu imu.yaml --cams camchain.yaml --bag kalibr.bag
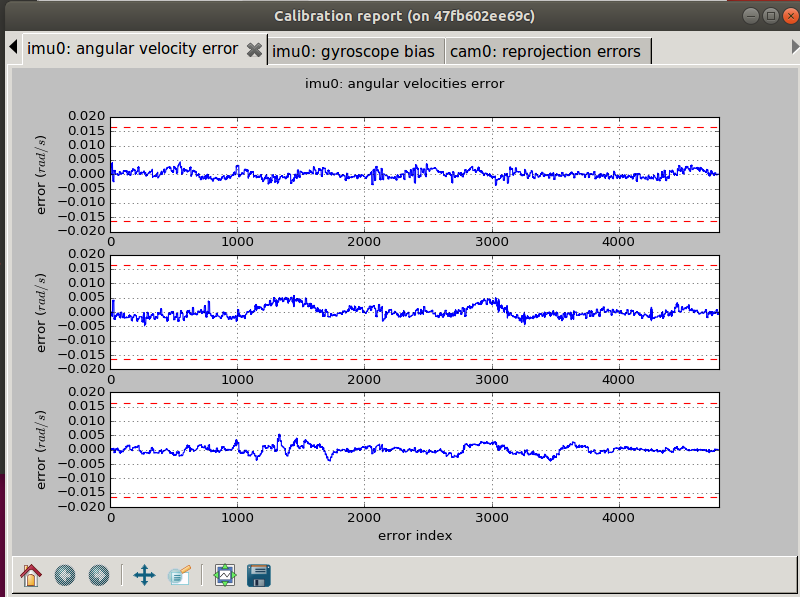

这里可以看到就已经标定完成了
转化ros.bag包
进入对应文件夹
cd VideoIMUCapture-Android/calibration
在calibration文件夹下运行命令,
SUDO=1 DATA=<my-data-path> ./run_dockerhub.sh
再运行(这里的camchain-imucam-kalibr.yaml,要具体写之前我们生成这个文件的位置,
python data2rosbag.py <path-to-recording> --calibration camchain-imucam-kalibr.yaml --raw-image
比如我的
python data2rosbag.py /host_home/dataset/test5 --calibration /host_home/dataset/cam_imu/kalibr/camchain-imucam-kalibr.yaml --raw-image
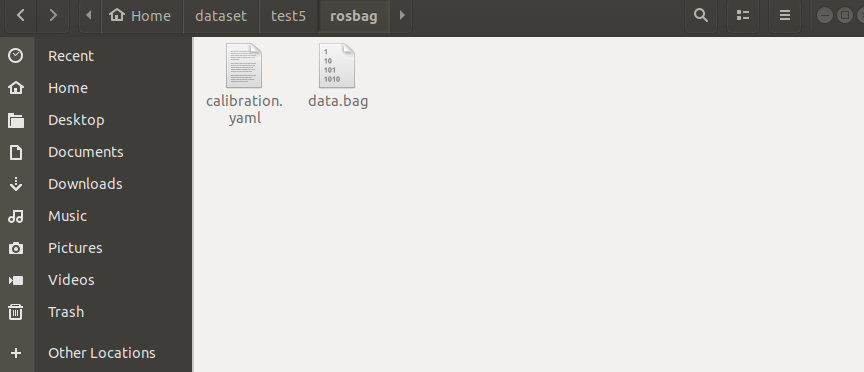
这样在这个文件夹下就生成了data.bag的包
在VINS上运行
打开VINS的config文件夹,新建一个android的文件夹
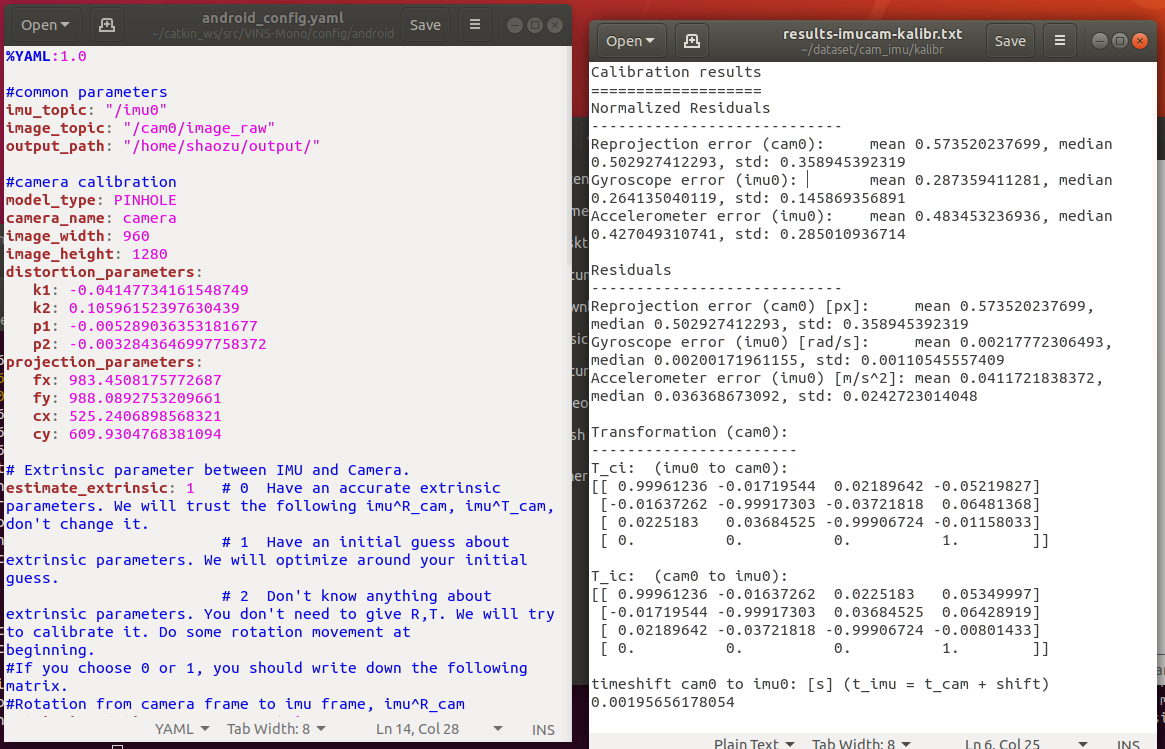
将euroc文件夹下的euroc_config.yaml复制到android的文件夹下,改名为android_config.yaml
修改里面的image_width,image_height,这里注意那个手机APP比如显示的分辨率是1280x960,你这里width要写960,height写1280,因为你手机是竖屏的。(千万不要把model_type改为小写,可能之前那个标定文件里是小写,但这里要保持大写,要不然后面跑的时候你看到的都是蓝色的点)
打开之前的标定文件,把imu和cam的参数填到andoid_config.yaml中
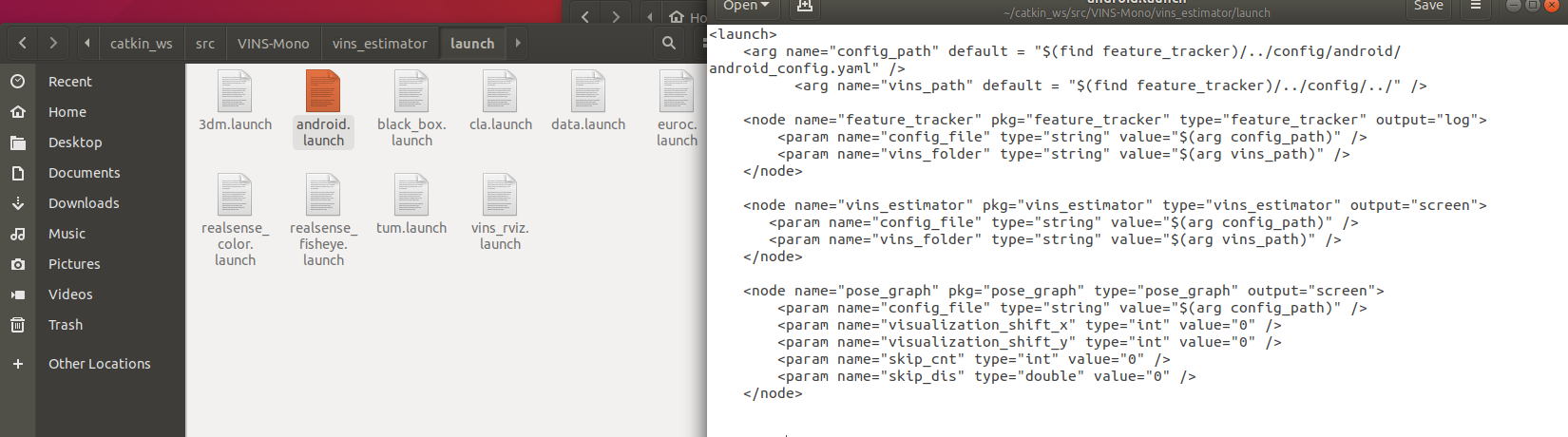
在VINS的文件夹中复制euroc.launch一份,改名为android.launch,修改config_path为我们刚才创建的android_config.yaml的文件夹
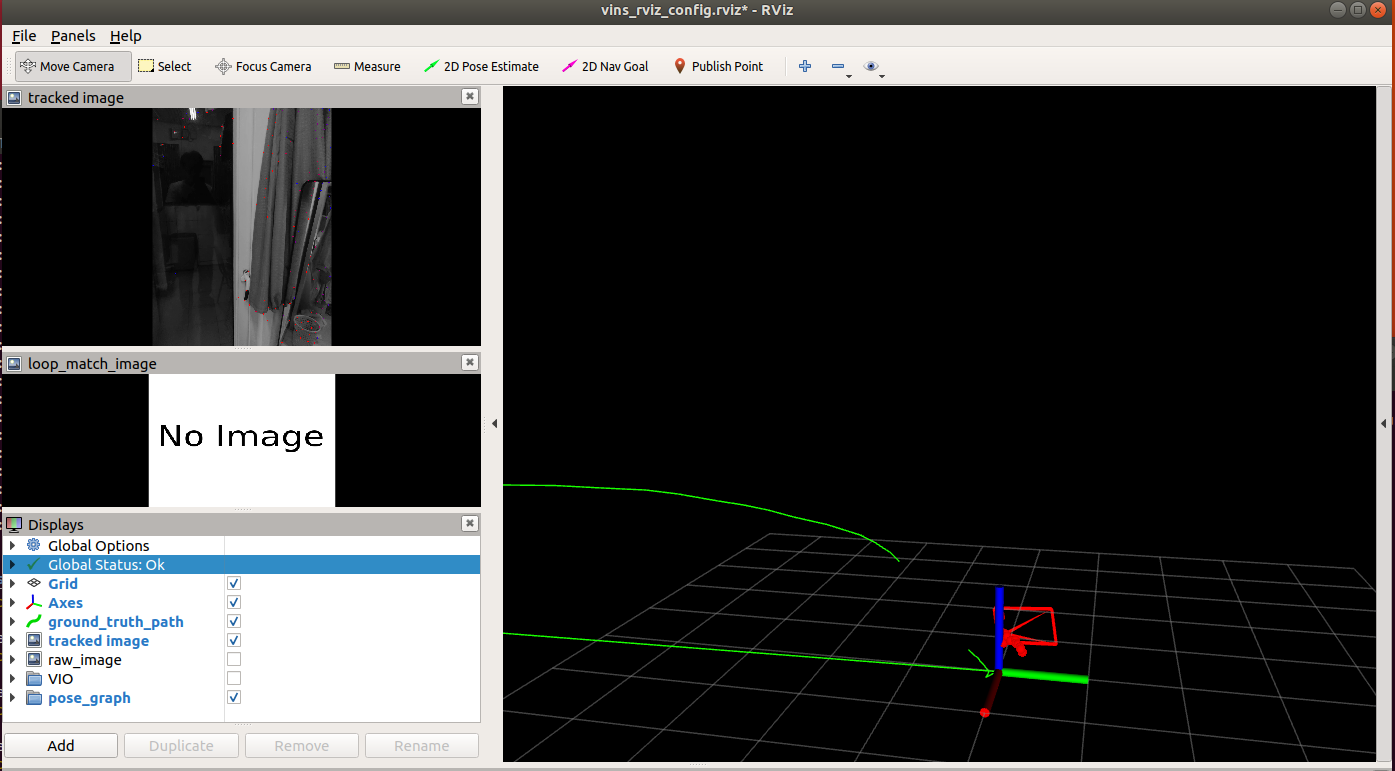
开始运行
在catkin_ws文件夹下分别打开三个终端,分别输入
source devel/setup.bash
roslaunch vins_estimator android.launch
source devel/setup.bash
roslaunch vins_estimator vins_rviz.launch
这里就是你自己数据集生成的bag包的位置
source devel/setup.bash
rosbag play data5.bag
到这一步,我们就终于用手机完成了数据集制作标定和运行,当然现在效果还不行,具体细节就要我们自己去优化了
参考博客:
Android的SLAM相机和IMU标定方法


















 1412
1412

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











