







Planning
1 Planning模块简介
规划(planning)模块的作用是根据感知预测的结果,当前的车辆信息和路况规划出一条车辆能够行驶的轨迹,这个轨迹会交给控制(control)模块,控制模块通过油门,刹车和方向盘使得车辆按照规划的轨迹运行。 规划模块的轨迹是短期轨迹,即车辆短期内行驶的轨迹,长期的轨迹是routing模块规划出的导航轨迹,即起点到目的地的轨迹,规划模块会先生成导航轨迹,然后根据导航轨迹和路况的情况,沿着短期轨迹行驶,直到目的地。这点也很好理解,我们开车之前先打开导航,然后根据导航行驶,如果前面有车就会减速或者变道,超车,避让行人等,这就是短期轨迹,结合上述的方式直到行驶到目的地。
2 routing与planning的关系
routing模块规划的路径是planning模块规划轨迹的输入信息 来源之一,能够协助planning规划出安全,可靠的行驶轨迹。,但是Planning并不直接调用routing模块,是通过client请求external_command模块。
planning模块通常根据传感器输入(激光雷达、视觉摄像头等)规划出车辆当前时刻需要的一条行驶轨迹,但是一些特殊场景下,如大雾天气、夜晚、匝道进出口等,由于输入信息缺失,不能规划出安全行驶轨迹,此时可以根据routing规划导航路径,结合高精地图信息,能够得到一条满足行驶的轨迹。
3 planning 的输入输出
输入输出由Reader和Writer构成,并定义在每个模块的component文件中。CyberRT框架定义了两种模式,分别为消息触发和时间触发,而planning中采用的为消息触发,因此必须接到特定的上游消息后,才会进入内部主逻辑,而消息触发的上游消息,定义为component中Process()函数的入参。代码在modules/planning/planning_component/planning_component.cc下。
planning的上下游关系总结为下图:
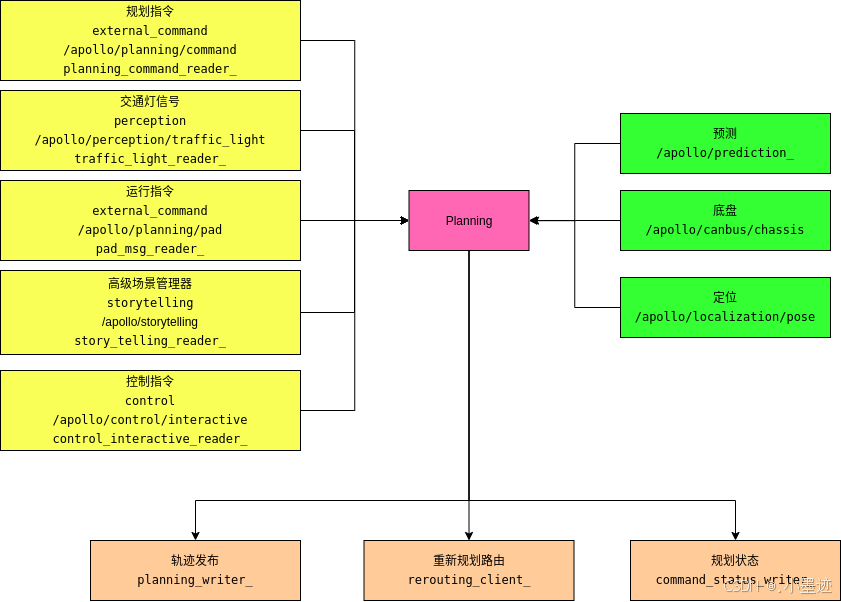
planning依赖于Process()的三个上游输入,只有同时接到这三个输入,才会触发planning的主逻辑,即是planning正常启动的必要条件。planning的输出就比较简单了,主要是给控制的ADCTrajectory数据,包含了一条带时间、速度的轨迹点集,具体的格式定义可以查看对应的proto文件。
参考链接:
11 Planning



















 1155
1155

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











