







、总的调试步:
1、每天过来检查托盘位置与机械手位置有没有被移动过。没有问题,插上机械手电源,开关电源电源。
2、开机,选择程序429,从第0步骤开始,检查速度适中,然后顺序执行。直至机械手移动到一个可以自由移动的位置,停止.选择程序526,从第0步开始,在示教模式下,速度始终,顺序执行,检查行程有无问题,放置位置,起始位置有无变动。
3、在示教模式下确保没有问题后,调至再生模式,步骤调至0,刚开始速度不宜过快,10%即可,第一次再生模式下运行,随时准备按下停止按钮,观察路径、抓取位置、放置位置有无碰撞,若有,则调至示教模式,调整位置,再返回再生模式下执行。
4、每天调试完后,选择程序10,执行,让机械手收回,不影响工人工作。关机,拔掉电源,用塑料袋遮住机械手,给控制箱盖“棺”,防铁粉侵蚀。记得剪断冲床两个按钮接出来的4根线,并用黑胶布包扎好,防止发生意外。
二、程序结构
①先执行程序526,为卸垛模式,先到抓取位置抓取一个铁板,然后走走走,走到释放位置,放下,离开冲床一段距离;
②调用程序520,控制继电器从而控制冲床冲压铁板,冲压完成后,进入释放位置把铁板取出来;
③调用程序530,为堆列模式,将铁板按照顺序在另一个地方放置。
④返回程序526,开始下一个铁板的操作。
三、如何调整放置位置
在示教模式下,抓取一块铁板,步骤执行将铁板移动到释放位置,释放位置应为:铁板长边(418mm)与短边(80mm)应分别与放置夹具前边、左边平行,且留有1-2cm的距离,z轴贴紧压台。然后距离当前位置为释放位置或者直接修改释放位置。修改完位置后,先手动将铁板移出冲床,此处切记不要用顺序执行,有可能会损坏机械手。
释放位置无问题后,调整往左上角靠靠的位置H,此处的调试方法:不要抓取铁板,顺序执行到释放位置,然后在当前位置,手动速度调到3,然后按x+ N次,Y- N次(多少次取决于实际情况),然后修改原来的位置,然后在顺序执行,看看位置差多少,哪个边有缝就调整那个边,手动调整到刚才的位置H,比如左边有缝,就应该再按x+。调整完成后,将步骤调至步骤0,重新顺序执行。
无问题后,就切换至再生模式下,从步骤0开始,自动运行。
四、如何调整抓取位置
1、顺序移动到抓取位置,注意,卸垛时的调整抓取位置,应从最底下的铁板进行设置,因此需要先将铁板挪开,腾出抓取第一块铁板的位置处理,抓取位置的选择应该满足下面几点:1、机械手前面不要碰到挡板。2、抓取位置尽量靠中,3、位置可以压深一些,刚好触碰到开关最好。
五、定义用户坐标
有时候托盘被移动得太厉害,或者做新的一个工序,得重新调整用户坐标,步骤:
1、在示教模式下,手动移动机械手到托盘的原点位置,记录下该位置,此处即为原点
2、然后定x轴,沿着托盘的x轴方向走,注意要贴紧托盘的边边,我们以托盘作为我们的坐标,调整与原点同样的高度,记录下该位置,此处为x轴
3、同样的方法,找到y轴,记录下该位置,此处为y轴。
4、3个坐标都找好后,进行托盘注册。
若:途中发现:1、抓取第一块铁块与第二十块铁块的中心位置偏差过大,考虑是坐标系没有建立好,调整x y轴。
2、若第一块铁块能抓到,但是第二块却抓不到,考虑可能是xoy不在一个高度上。
六、引出的I/O
CFD控制箱,左边的为OUT,右边为IN,
输出扣:
OUT1 A17 绿色 控制机械手上的继电器,控制电磁铁的吸合,输出1:电磁铁失能,0:使能
OUT2 A 18 棕红
OUT3 蓝色
OUT4 黑色 控制冲压继电器
OUT5 红色 控制冲压继电器
输入口:
IN1 A24 粉红 左右开关
IN2 A23 紫色 上下开关
IN3 A22 棕色 前后开关
IN4 A21 浅蓝
IN5 A20 黑色
IN6 蓝色
IN7 红色
IN8 黑色
电源口:
黄 A13 24V
白 A14 24V
红 A15 GND
蓝 A16 GND
灰 A 19GND
冲床开关的两个开关,同样颜色的线为一组,红红一组,黑黑一组。
七、可能会遇到的问题
1、如果在示教模式下,发现路径不对了 ,调整了但是机械手还是“瞎走”,解决方法:
将出错或者要修改的语句拷贝到另一个空的程序,在另一个空的程序中修改你想要修改的位置,修改完成后,再在原来的程序中替换掉出问题的语句。
2、如果在再生模式下,发现路径不对了 ,可能是以下问题
①检查程序是否从第0步开始
②程序开头是否加了堆列复位,若缺了,得加上,语句为FN,注意:码垛与卸垛使用的堆列号不一样,都得复位。
3、继电器无法控制,极有可能是I/O板的保险管烧了。
4、出现移动中步骤间移动量超程。如图所示
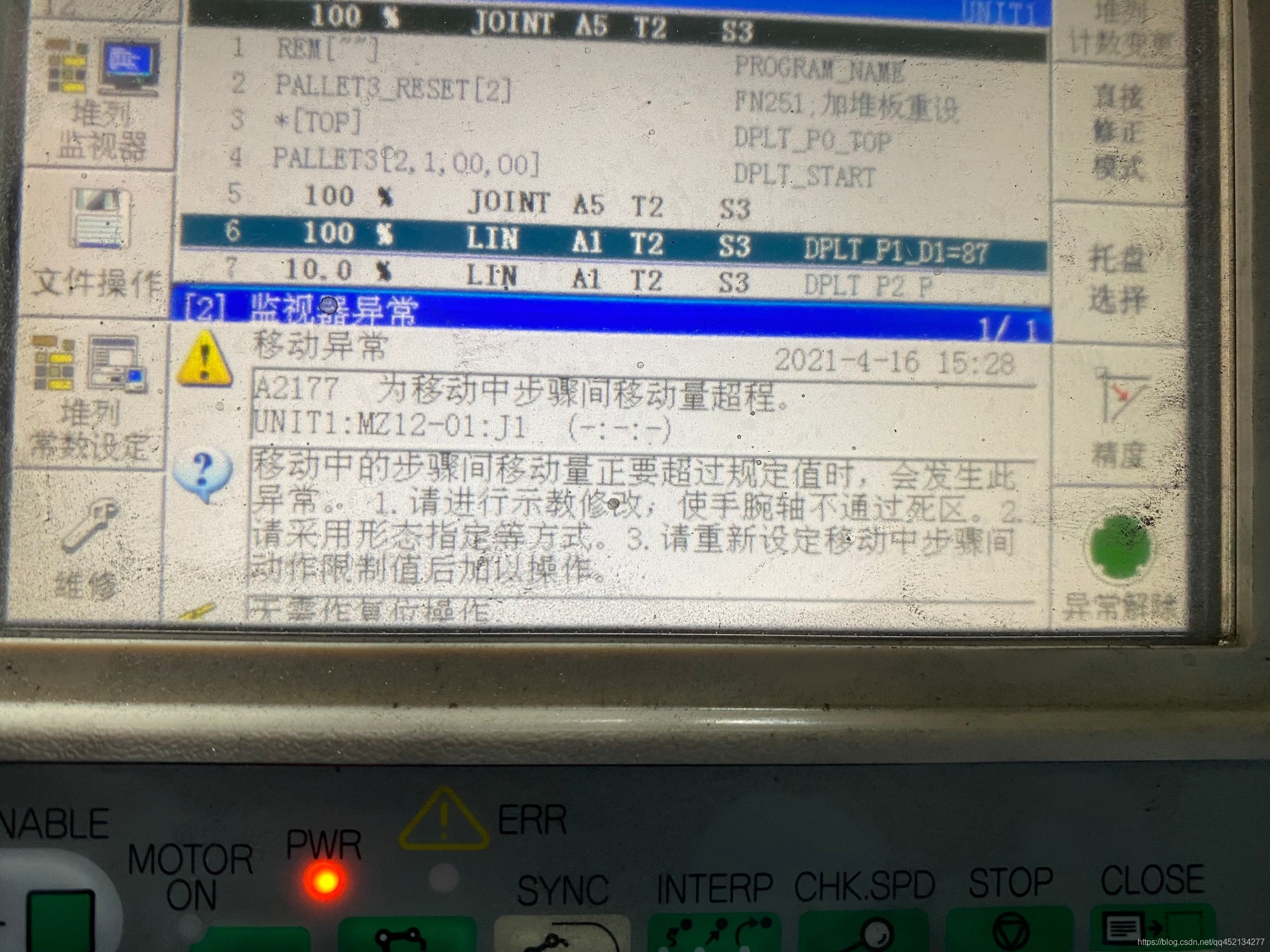
解决方法:如上图比如这里的步骤6无法移动到步骤7,可以加6和7步骤间插入一个缓冲点,比如在示教模式手动移动机械手,然后再按顺序执行,若能往步骤7走,则记录下刚才手动移动的位置,插入步骤6和步骤7间。再重新选择步骤0,检查行进中还有无这种此类问题。
5、
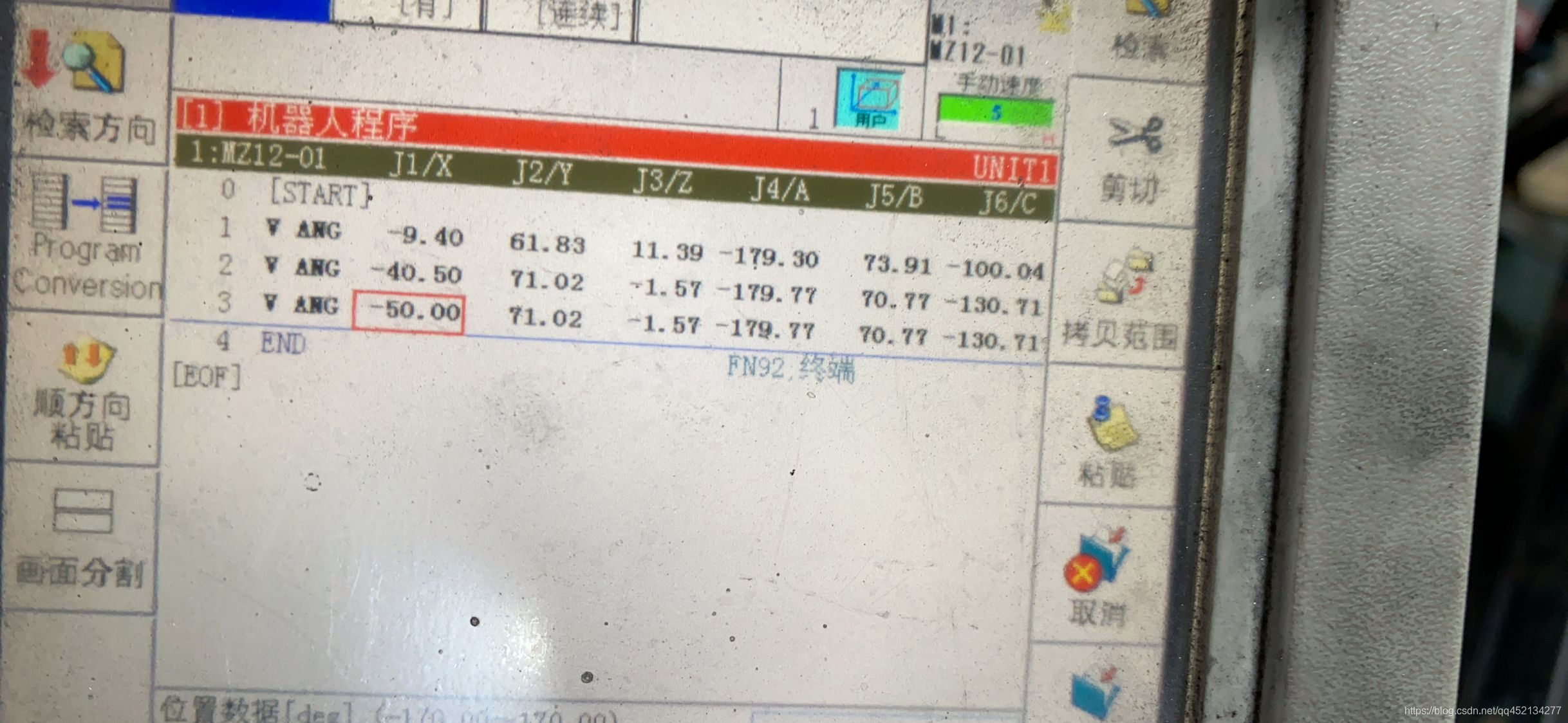
这里的坐标值是角度 怎么把他换成距离
解决方法:MOVEX即可用距离的方式控制
6、怎么可以获取机器人的坐标值怎么保存到变量里呢
GETPOS获取坐标 GETPOS 0,0,posCurrent,0,1 获取坐标位置存入posCurrent
将位置坐标 存入sgnPosition数组 OPEPOS 0,posCurrent,sgnPosition[1],0,0
目前有两种方法:方法一:使用GETP语句,GETP V11! 即可将位置信息依次存储到V11!~V16!变量中
方法二:
7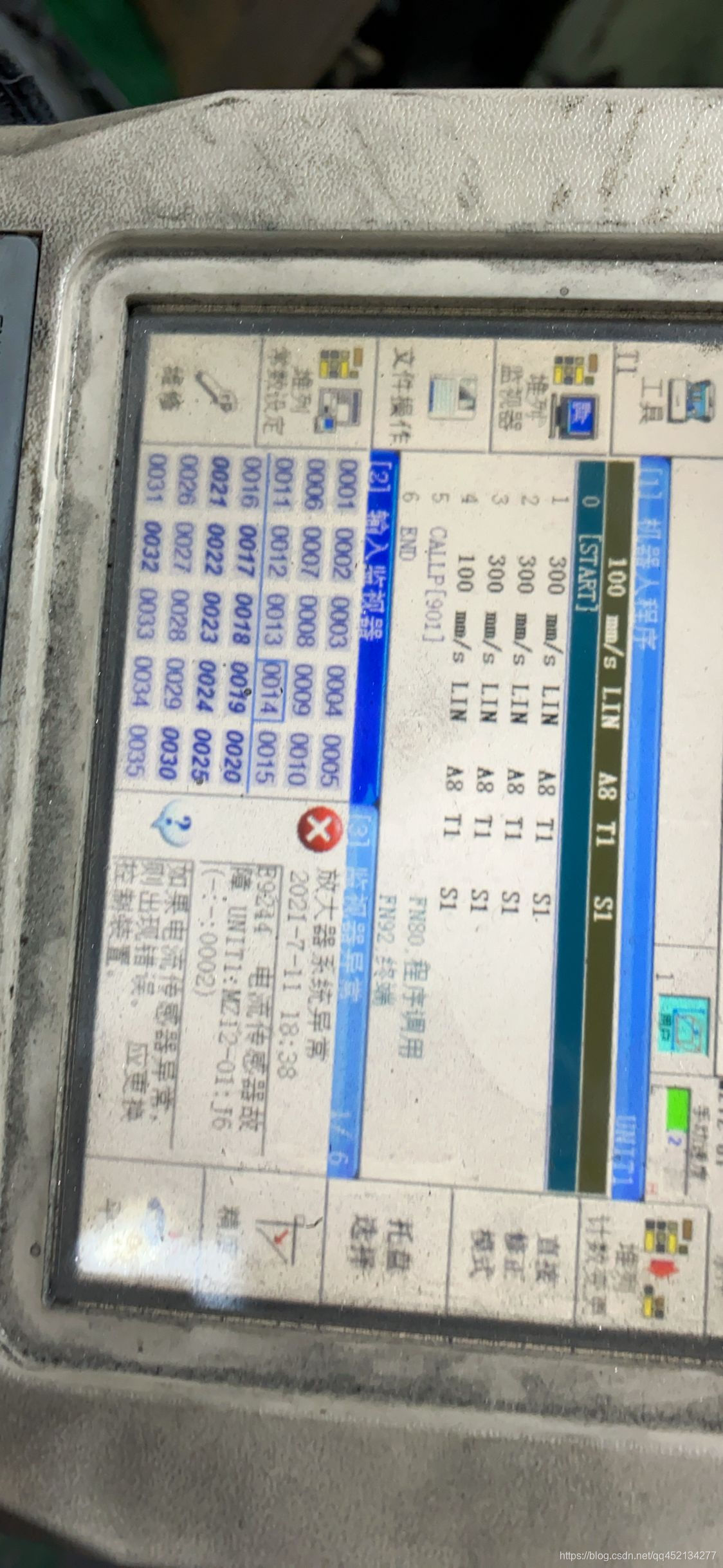
解决方法: 1、重启一下机子 2、有空是紧急按钮卡住了
8、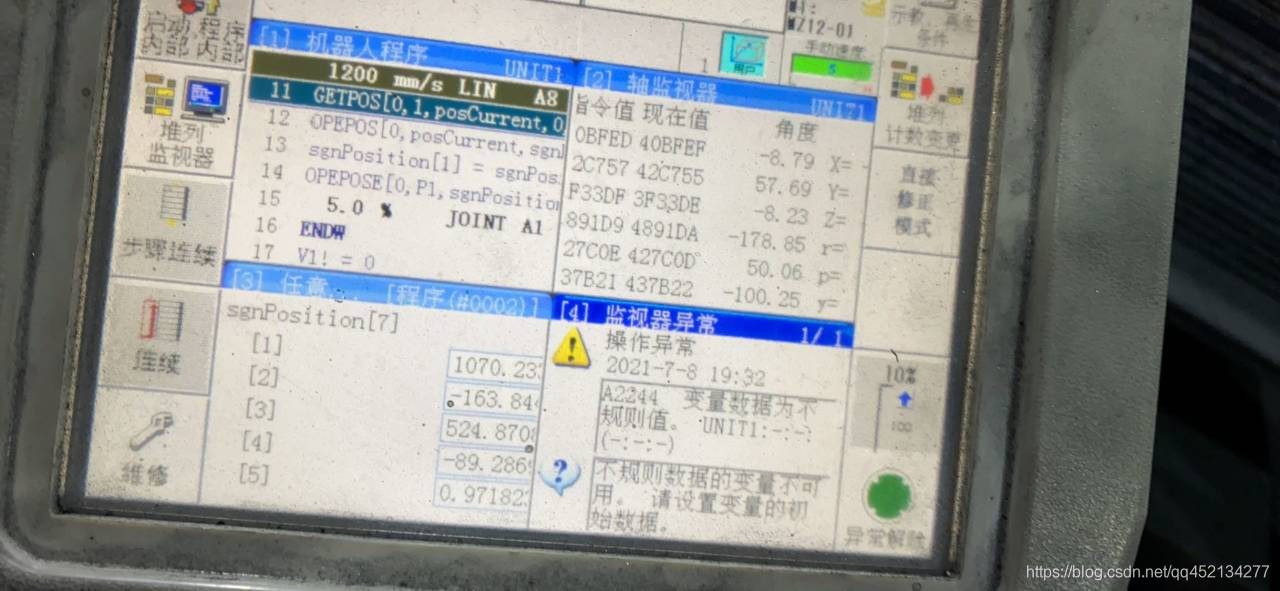
该问题还未解决
目前做的 加了姿势文件的制作
2021.7.20解决 换了获取机器人坐标的方法
八、资料快速索引
安全操作说明书:TFDCN-905-003_Precautions
TCFCN-153-004_ManualListCFD 里面为整体的介绍各个文档的功能。
常用的:
码垛卸垛编程:TFDCN-013-005_Palletize_function
所有指令汇总:TFDCN-092-003_CommandReference
机器人编程:TFDCN-012-009_Robot_language
I/O板的接线:TCFCN-183-003_CFD_CFDL_Option_IO_Connection
机器人接线向导:TCFCN-159-007_CFD_CFDL_SETUP
机器人基本操作:TCFCN-160-004_CFD_BASIC
机器人规格说明书:SMZCN-103-010_MZ12-01-CFD3020_FD11
目前我能想到的问题:程序中的卸垛程序的层数,如何与实际中放置的层数对应起。2、如何解决空抓问题。3、如何解决两个铁板重叠,抓起步完善问题。

















 3327
3327

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









