




海康威视热成像双光谱MINI云台摄像改ros驱动
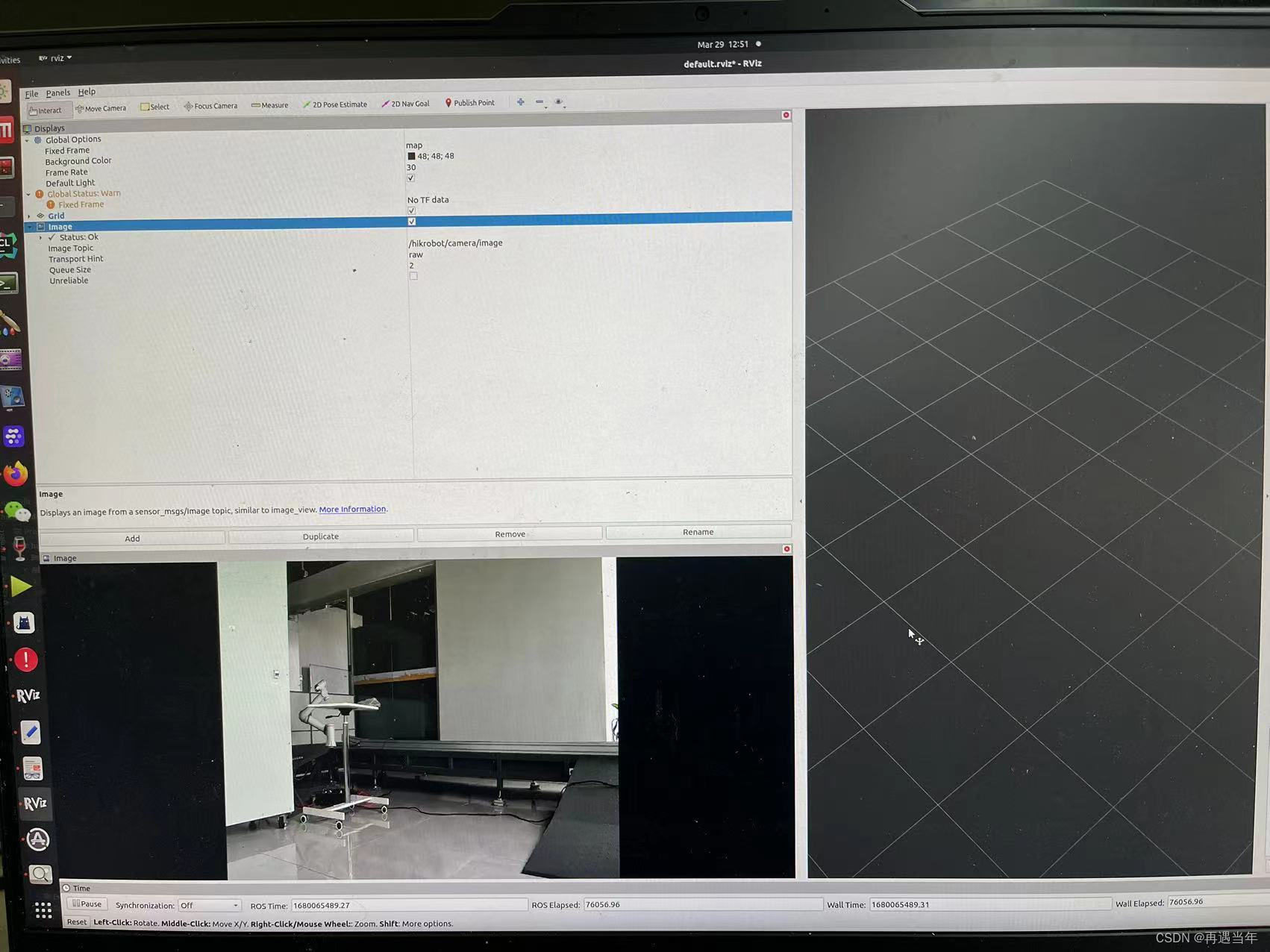
海康威视 型号:DS-2TD5567T-7/W 支持实时视频预览,实时视频转opencv,实时视频转ros消息,通过rviz预览
主要代码: consoleMain.cpp
#ifndef __APPLE__
#include <ros/ros.h>
#include <ros/package.h>
#include <stdio.h>
#include <iostream>
#include "GetStream.h"
#include "public.h"
#include "ConfigParams.h"
#include "Alarm.h"
#include "CapPicture.h"
#include "playback.h"
#include "Voice.h"
#include "tool.h"
#include <string.h>
#include <signal.h>
#include "maindecte_msgs/Msgdata.h"
#include "maindecte_srvs/maindecte.h"
#include <sensor_msgs/Image.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include "opencv2/xfeatures2d.hpp"
#include <thread>
using namespace cv;
using namespace std;
int lUserID_ =0;
//全局变量
Mat g_BGRImage;
LONG nPort = -1;
ros::Publisher pub;
bool whileFig=true;
/**
* 海康摄像头ros驱动
* 苏凯
* 邮箱: 422168787@qq.com
* 2023-03-27
* rosrun haikangdecte haikangdecte_node
*/
void CALLBACK DecCBFun(LONG nPort, char* pBuf, LONG nSize, FRAME_INFO* pFrameInfo, void* nReserved1, LONG nReserved2) {
if (pFrameInfo->nType == T_YV12)
{
if (g_BGRImage.empty())
{
g_BGRImage.create(pFrameInfo->nHeight, pFrameInfo->nWidth, CV_8UC3);
}
Mat YUVImage(pFrameInfo->nHeight + pFrameInfo->nHeight / 2, pFrameInfo->nWidth, CV_8UC1, (unsigned char*)pBuf);
cvtColor(YUVImage, g_BGRImage, COLOR_YUV2BGR_YV12);
sensor_msgs::ImagePtr img_msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8", g_BGRImage).toImageMsg();
pub.publish(img_msg);
YUVImage.~Mat();
}
}
void CALLBACK fRealDataCallBack(LONG lRealHandle, DWORD dwDataType, BYTE *pBuffer, DWORD dwBufSize, void *pUser)
{
switch (dwDataType)
{
case NET_DVR_SYSHEAD:
if (!PlayM4_GetPort(&nPort))
{
break;
}
//m_iPort = lPort;
if (dwBufSize > 0)
{
if (!PlayM4_SetStreamOpenMode(nPort, STREAME_REALTIME))
{
break;
}
if (!PlayM4_OpenStream(nPort, pBuffer, dwBufSize, 10 * 1024 * 1024))
{
break;
}
if (!PlayM4_Play(nPort, NULL))
{
break;
}
if (!PlayM4_SetDecCallBack(nPort, DecCBFun))
{
break;
}
}
break;
case NET_DVR_STREAMDATA:
if (dwBufSize > 0 && nPort != -1)
{
if (!PlayM4_InputData(nPort, pBuffer, dwBufSize))
{
cout << "error" << PlayM4_GetLastError(nPort) << endl;
break;
}
}
break;
default:
if (dwBufSize > 0 && nPort != -1)
{
if (!PlayM4_InputData(nPort, pBuffer, dwBufSize))
{
break;
}
}
break;
}
}
bool callback(maindecte_srvs::maindecte::Request &request, maindecte_srvs::maindecte::Response &response) {
std::cout << "entry function" << std::endl;
int lRealPlayHandle;
NET_DVR_PREVIEWINFO struPlay = {0};
struPlay.hPlayWnd = NULL;
struPlay.lChannel = 1;
struPlay.dwStreamType = 0;
struPlay.dwLinkMode = 0;
struPlay.bBlocked = 0;
lRealPlayHandle = NET_DVR_RealPlay_V40(lUserID_, &struPlay, NULL, NULL);
//*camera_RealPlay = lRealPlayHandle;
if (lRealPlayHandle < 0)
{
printf("pyd---NET_DVR_RealPlay_V40 error, %d\n", NET_DVR_GetLastError());
}
else
{
std::cout << "NET_DVR_RealPlay_V40 success" << std::endl;
}
int msgtype = request.msgtype;
maindecte_msgs::Msgdata msgdata= request.msgdata;
int dwPTZCommand= request.dwPTZCommand;//云台控制命令
int dwStop= request.dwStop;//0开始, 1停止
int dwSpeed= request.dwSpeed;//速度 范围(1-7)
std::string return_msg = "ok";
std::cout << "MSG_type " << msgtype << std::endl;
// NET_DVR_GET_FOCUSING_POSITION_STATE;
switch (msgtype)
{
case 500001: //云台控制
{
try
{
std::cout << "云台控制 500001" << std::endl;
std::cout << "云台控制 0 开始 1停止:" << dwStop<<std::endl;
std::cout << "云台控制 0 dwPTZCommand" <<dwPTZCommand<< std::endl;
std::cout << "云台控制 0 开始 1停止" << std::endl;
if(dwPTZCommand<=0)
break;
int error1 = NET_DVR_PTZControl(lRealPlayHandle, dwPTZCommand, dwStop);
if (error1 < 0)
{
printf("pyd---500001云台控制 error, %d\n", NET_DVR_GetLastError());
//NET_DVR_Cleanup();
}
break;
}
catch (std::exception &e)
{
std::cout << "exception : " << e.what() << std::endl;
}
break;
}
case 500002://带速度的云台控制
{
try
{
std::cout << "云台控制 500002" << std::endl;
std::cout << "云台控制 0 开始 1停止:" << dwStop<<std::endl;
std::cout << "云台控制 0 dwPTZCommand" <<dwPTZCommand<< std::endl;
if(dwPTZCommand<=0)
break;
if(dwSpeed<=0)
dwSpeed=1;
if(dwSpeed>7)
dwSpeed=7;
int error1 = NET_DVR_PTZControlWithSpeed(lRealPlayHandle, dwPTZCommand, dwStop,dwSpeed);
if (error1 < 0)
{
printf("pyd---500001云台控制 error, %d\n", NET_DVR_GetLastError());
//NET_DVR_Cleanup();
}
break;
}
catch (std::exception &e)
{
std::cout << "exception : " << e.what() << std::endl;
}
break;
}
default:
break;
}
NET_DVR_StopRealPlay(lRealPlayHandle);
response.result=return_msg;
return true;
}
void signalHandler(int signum)
{
whileFig=false;
ros::shutdown();
}
//rosrun haikangdecte haikangdecte_node
int main(int argc,char *argv[])
{
//节点名
string nodeName = "haikangdecte_node";
//初始化节点
ros::init(argc,argv,nodeName);
//创建节点
ros::NodeHandle nh_;
ros::NodeHandle private_nh("~");
signal(SIGINT, signalHandler);
//创建Service Server
const ros::ServiceServer &server = nh_.advertiseService("/maindecte_service", callback);
pub = nh_.advertise<sensor_msgs::Image>("/hikrobot/camera/image", 1);
ros::AsyncSpinner spinner(1); // Use 4 threads
spinner.start();
NET_DVR_Init();
Demo_SDK_Version();
NET_DVR_SetLogToFile(3, "./sdkLog");
char cUserChoose = 'r';
//Login device
NET_DVR_USER_LOGIN_INFO struLoginInfo = {0};
NET_DVR_DEVICEINFO_V40 struDeviceInfoV40 = {0};
struLoginInfo.bUseAsynLogin = false;
struLoginInfo.wPort = 8000;
memcpy(struLoginInfo.sDeviceAddress, "10.9.162.175", NET_DVR_DEV_ADDRESS_MAX_LEN);//10.8.98.80
memcpy(struLoginInfo.sUserName, "admin", NAME_LEN);//admin
memcpy(struLoginInfo.sPassword, "Admin123", NAME_LEN);//hik12345
lUserID_ = NET_DVR_Login_V40(&struLoginInfo, &struDeviceInfoV40);
if (lUserID_ < 0)
{
printf("pyd---Login error, %d\n", NET_DVR_GetLastError());
printf("Press any key to quit...\n");
cin>>cUserChoose;
NET_DVR_Cleanup();
return HPR_ERROR;
}
NET_DVR_PREVIEWINFO struPlayInfo = { 0 };
struPlayInfo.hPlayWnd = NULL; //需要SDK解码时句柄设为有效值,仅取流不解码时可设为空
struPlayInfo.lChannel = 1; //预览通道号
struPlayInfo.dwStreamType = 1; //0-主码流,1-子码流,2-码流3,3-码流4,以此类推
struPlayInfo.dwLinkMode = 0; //0- TCP方式,1- UDP方式,2- 多播方式,3- RTP方式,4-RTP/RTSP,5-RSTP/HTTP
struPlayInfo.bBlocked = 0; //0- 非阻塞取流, 1- 阻塞取流
LONG lRealPlayHandle = NET_DVR_RealPlay_V40(lUserID_, &struPlayInfo, fRealDataCallBack, NULL);
if (lRealPlayHandle < 0)
{
printf("NET_DVR_RealPlay_V40 error\n");
printf("%d\n", NET_DVR_GetLastError());
NET_DVR_Logout(lUserID_);
NET_DVR_Cleanup();
return 1;
}
while (ros::ok()&&whileFig)
{
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
// 停止预览
NET_DVR_StopRealPlay(lRealPlayHandle);
// 注销登录
NET_DVR_Logout(lUserID_);
//logout
NET_DVR_Logout_V30(lUserID_);
// 释放SDK资源
NET_DVR_Cleanup();
return 0;
}
#endif
cmakelist.txt
cmake_minimum_required(VERSION 3.0.2)
project(haikangdecte)
## Compile as C++11, supported in ROS Kinetic and newer
#add_compile_options(-std=c++11)
#add_compile_options(-MMD -MP )
#add_compile_options(-std=c++11 )
#add_compile_options(-std=c++14 )
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_compile_options(-std=c++11)
add_compile_options(-std=c++14)
#CXXFLAGS += -MMD -MP
#CXXFLAGS += -std=c++11
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
# 寻找OpenCV库
set(OpenCV_DIR /home/sukai/3rdparty/opencv4.5.0/build/install/lib/cmake/opencv4 )
set(OPENCV_EXTRA_MODULES_PATH /home/sukai/3rdparty/opencv4.5.0/opencv_contrib-4.5.0/modules)
set(OPENCV_ENABLE_NONFREE ON)
# 设置OpenCV的编译选项
add_definitions(-DOPENCV_ENABLE_NONFREE=ON)
#find_package(OpenCV REQUIRED)
find_package(OpenCV REQUIRED QUIET)
include_directories(${OpenCV_INCLUDE_DIRS})
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
cv_bridge
image_transport
sensor_msgs
std_srvs
maindecte_msgs
maindecte_srvs
)
#if (POLICY CMP0072)
#set(OpenGL_GL_PREFERENCE LEGACY)
#set(OpenGL_GL_PREFERENCE GLVND)
#endif()
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
#find_package(SQLite3 REQUIRED)
## System dependencies are found with CMake's conventions 报错以及相关boost问题 https://blog.csdn.net/qq_43111963/article/details/117869259 ||cmake与boost版本不兼容[1] https://stackoverflow.com/questions/65560775/cmake-new-boost-version-may-have-incorrect-or-missing-dependencies-and-importe
# OpenCV
#find_package(OpenCV REQUIRED QUIET)
#find_package(Eigen3 REQUIRED QUIET)
#find_package(MPI REQUIRED)
#find_package(Threads REQUIRED)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs # Or other packages containing msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
#catkin_package(
# INCLUDE_DIRS include
# LIBRARIES contNav
# CATKIN_DEPENDS roscpp rosmsg rospy
# DEPENDS system_lib
#)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES visualOrientation
# CATKIN_DEPENDS roscpp rosmsg rospy
# DEPENDS system_lib
#CATKIN_DEPENDS geometry_msgs roscpp rosmsg rospy tf
# CATKIN_DEPENDS geometry_msgs roscpp rosmsg rospy tf
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
include
${catkin_INCLUDE_DIRS}
#/usr/include/mysql
/usr/local/include
${PCL_INCLUDE_DIRS}
#${OpenCV_INCLUDE_DIRS}
/home/sukai/3rdparty/opencv4.5.0/build/install/include #ubuntu20.04
# /usr/include/eigen3
#/usr/local/include/opencv4
)
# find / -name "libAudioRender.so" 2>/dev/null
link_directories(
#/home/shi/docker/3rtparty/opencv4.5.0/build/install/lib #opencv_world.so
#/usr/local/lib #ubuntu18.04
#/home/sukai/3rtparty/opencv4.5.0/build/install/lib #ubuntu20.04
lib
linux64/lib
linux64/proj
linux64/lib/HCNetSDKCom
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/contNav.cpp
# )
#add_subdirectory(src/common)
#include_directories(./src/common)
#
#add_subdirectory(src/log)
#include_directories(./src/log)
# 查找所有cpp文件并将其存储在 SOURCES 变量中
file(GLOB SOURCES "src/*.cpp")
message("==============susuusu===============: ${SOURCES}")
# 创建可执行文件
add_executable(haikangdecte_node ${SOURCES})
add_dependencies(haikangdecte_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(haikangdecte_node ${catkin_LIBRARIES} ${OpenCV_LIBRARIES}
#opencv_world
#mysqlclient
# analyzedata
# AudioIntercom
# HCAlarm
# HCCoreDevCfg
# HCDisplay
# HCGeneralCfgMgr
# HCIndustry
# HCPlayBack
# HCPreview
# HCVoiceTalk
# iconv2
# StreamTransClient
# SystemTransform
#
#
#
# hcnetsdk
# HCCore
# AudioRender
# crypto
# hpr
# NPQos
# PlayCtrl
# ssl
# SuperRender
# commonFun
hcnetsdk
HCCore
AudioRender
crypto
hpr
NPQos
PlayCtrl
ssl
SuperRender
analyzedata
HCAlarm
HCCoreDevCfg
HCDisplay
HCGeneralCfgMgr
HCIndustry
HCPlayBack
HCPreview
HCVoiceTalk
iconv2
StreamTransClient
SystemTransform
)
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide src/sqlite/CppSQLite3.cpp
##========================test=============================================
##---
#add_executable(scan_to_pointcloud2_converter_node src/scan_to_pointcloud2_converter/scan_to_pointcloud2_converter.cpp )
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
#target_link_libraries(scan_to_pointcloud2_converter_node ${catkin_LIBRARIES} )
#####
## web ##
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_contNav.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
package.xml
<?xml version="1.0"?>
<package format="2">
<name>haikangdecte</name>
<version>0.0.0</version>
<description>The haikangdecte package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="sukai@todo.todo">sukai</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/contNav</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
<!-- <depend>roscpp</depend> -->
<!-- Note that this is equivalent to the following: -->
<!-- <build_depend>roscpp</build_depend> -->
<!-- <exec_depend>roscpp</exec_depend> -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use build_export_depend for packages you need in order to build against this package: -->
<!-- <build_export_depend>message_generation</build_export_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- <exec_depend>message_runtime</exec_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<!-- Use doc_depend for packages you need only for building documentation: -->
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rosmsg</build_depend>
<build_depend>rospy</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rosmsg</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rosmsg</exec_depend>
<exec_depend>rospy</exec_depend>
<build_depend>actionlib_msgs</build_depend>
<build_export_depend>actionlib_msgs</build_export_depend>
<exec_depend>actionlib_msgs</exec_depend>
<build_depend>sensor_msgs</build_depend>
<build_export_depend>sensor_msgs</build_export_depend>
<exec_depend>sensor_msgs</exec_depend>
<build_depend>geometry_msgs</build_depend>
<build_export_depend>geometry_msgs</build_export_depend>
<exec_depend>geometry_msgs</exec_depend>
<build_depend>tf</build_depend>
<build_export_depend>tf</build_export_depend>
<exec_depend>tf</exec_depend>
<build_depend>cv_bridge</build_depend>
<build_export_depend>cv_bridge</build_export_depend>
<exec_depend>cv_bridge</exec_depend>
<build_depend>maindecte_msgs</build_depend>
<build_export_depend>maindecte_msgs</build_export_depend>
<exec_depend>maindecte_msgs</exec_depend>
<build_depend>maindecte_srvs</build_depend>
<build_export_depend>maindecte_srvs</build_export_depend>
<exec_depend>maindecte_srvs</exec_depend>
<!-- 需要额外添加如下两句话,代表依赖PCL -->
<build_depend>libpcl-all-dev</build_depend>
<build_export_depend>libpcl-all-dev</build_export_depend>
<exec_depend>libpcl-all</exec_depend>
<build_depend>pcl_conversions</build_depend>
<build_export_depend>pcl_conversions</build_export_depend>
<exec_depend>pcl_conversions</exec_depend>
<build_depend>pcl_ros</build_depend>
<build_export_depend>pcl_ros</build_export_depend>
<exec_depend>pcl_ros</exec_depend>
<build_depend>std_srvs</build_depend>
<build_export_depend>std_srvs</build_export_depend>
<exec_depend>std_srvs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
配置 .bashrc 需要把SDK的lib目录加入到环境变量中,否则会报错: error while loading shared libraries: libAudioRender.so: cannot open shared object file: No such file or directory 参考:
export LD_LIBRARY_PATH="/usr/lib/x86_64-linux-gnu:$LD_LIBRARY_PATH:/home/sukai/3rdparty/opencv4.5.0/build/install/lib:/usr/local/lib:/home/sukai/workspace/workspace_ros_car_noetic/src/haikangdecte/linux64/lib:/home/sukai/workspace/workspace_ros_car_noetic/src/haikangdecte/linux64:/home/sukai/workspace/workspace_ros_car_noetic/src/haikangdecte/linux64/lib/HCNetSDKCom"
消息格式:
msg消息:
maindecte_msgs/Msgdata
string FilePath
string filepath
string OPT
string task_id
string sensor_id
string x
string y
string dx
string dy
string resize_cotX
string resize_cotY
string msg
string fPan
string fTilt
string fZoom
string dwFocus
string aperture
string shutter
string exposure
string gain
string data
string CMD
string Parameter
string Direction
string Speedlevel
---
srv消息:
maindecte_srvs/maindecte
int32 msgtype
maindecte_msgs/Msgdata msgdata
int32 dwPTZCommand
int32 dwStop
int32 dwSpeed
---
string result
string message
maindecte_msgs/Msgdata result_msgdata
rqt 调试
rosrun rqt_service_caller rqt_service_caller
rosrun rqt_service_caller rqt_service_caller
启动:
rosrun haikangdecte haikangdecte_node
更详细请移步b站详细教程:昵称 再遇当年
开源地址:
https://gitee.com/yongwangzhiqiankai/haikangdecte.git


















 368
368

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











