







1、掌握点云数据的预处理方法和特征计算
2、能够基于点云不同几何特征实现不同地理要素的简要提取
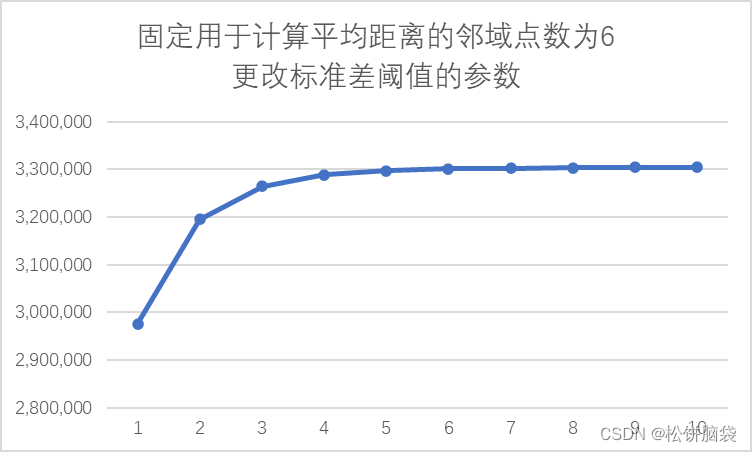
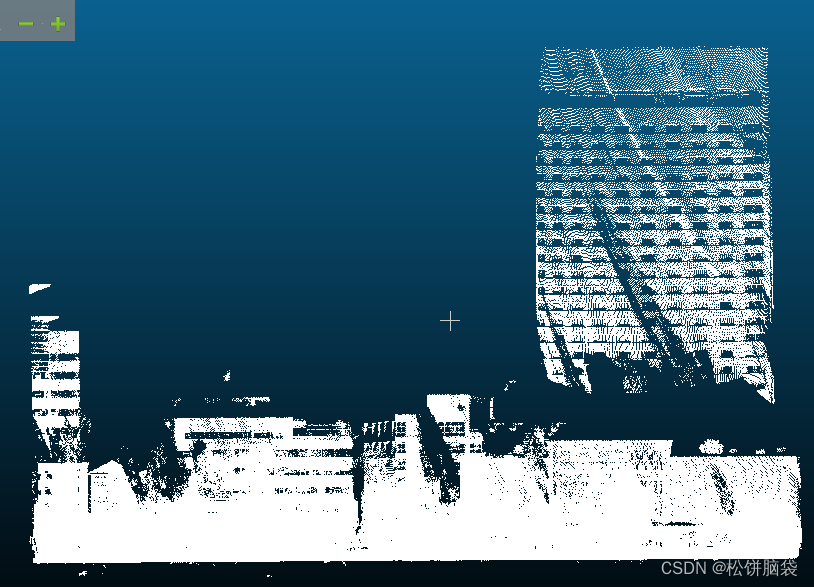
| 三、实验内容及步骤: 1、SOR异常值剔除 1.1、 SOR (Statistical Outlier Removal)是一种点云数据处理中常用的异常值剔除算法。其基本思想是对于每个点,计算其与其邻域内其他点距离的平均值和标准差。如果该点与其邻域内的大多数点相比距离过远,即偏离平均距离超过了一定的标准差阈值,则认为它是一个离群点(outlier),并将其删除或标记。 需要设置两个参数 1)number of points to use for mean distance estimation,即用于计算平均距离的邻域点数; 2)Standard deviation multiplier threshold(nSignma),即标准差阈值的倍数。 1.2、有两个需要设置的参数值,所以在实验时,想要得到最佳的剔除效果,需要使用控制变量法,在固定一个值的情况下更改另一个值,并将得到的结果图对比得到最优的某个参数的值。 而在数次尝试中,通常情况下,number of points to use for mean distance estimation设置为6或8,表示对于每个点考虑其周围6或8个最近邻点的距离;Standard deviation multiplier threshold通常取10左右,这意味着只保留距离平均值不超过10倍标准差的点。 因此在下面的对比实验中,对比图的两个值主要在6和10之间调整,用A,B表示两个值,而在之后使用Excel精细的表示点数的变化时,会从选取多个点的结果值进行对比, 1.2.1、固定用于计算平均距离的邻域点数为6,更改标准差阈值的参数
根据每次剔除后剩余的点云点数为Y轴,标准差为X轴制成Excel表格,制成图表对比,可以看到在值趋向于10时,值趋于平稳
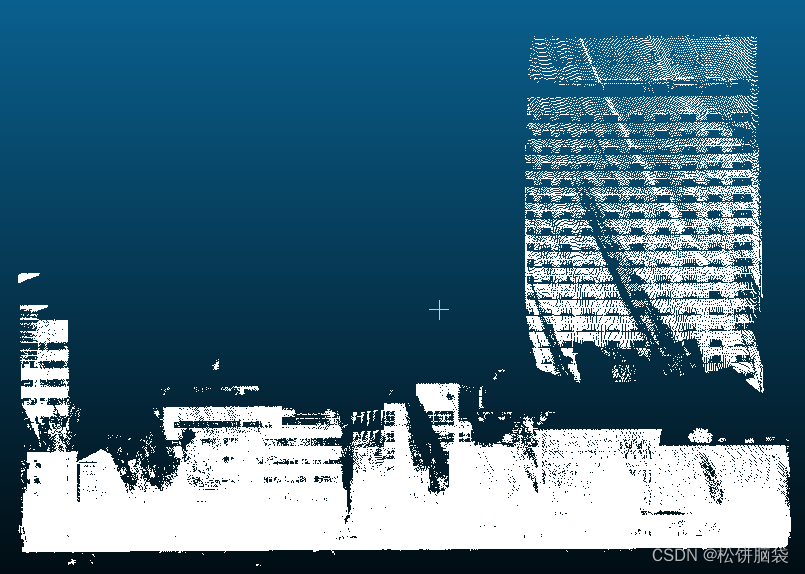
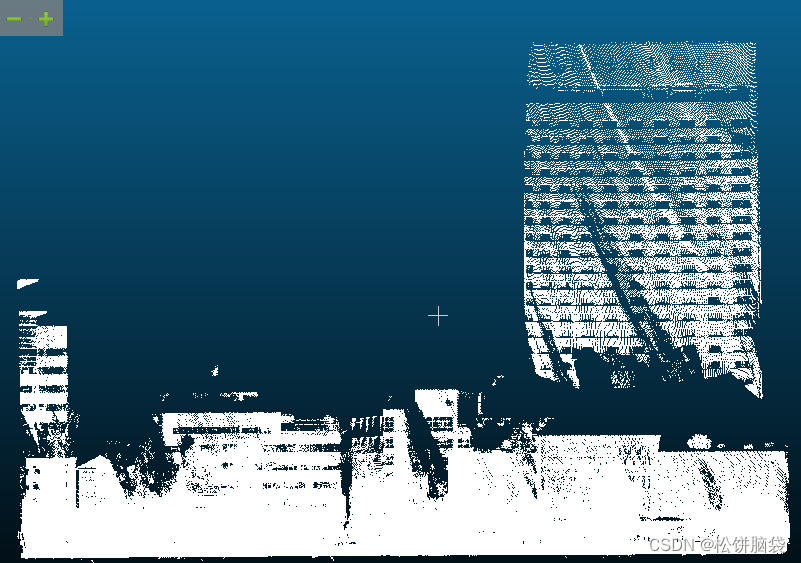
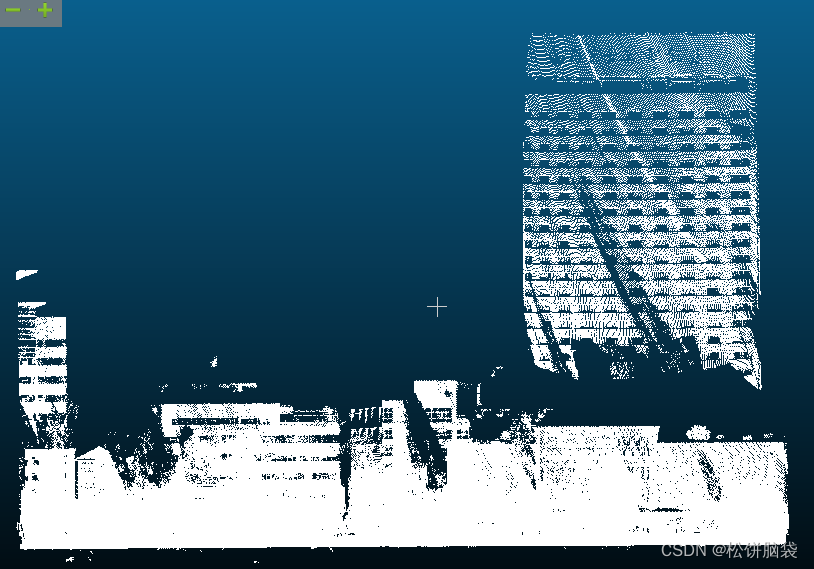
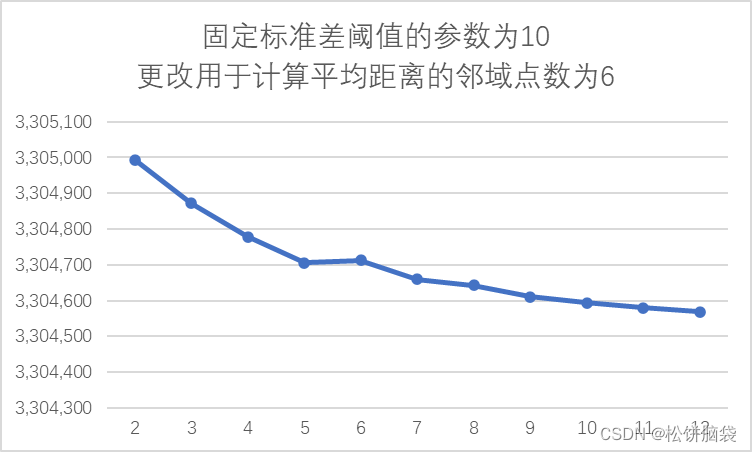
图2 固定领域点数的Excel表格 1.2.2、固定标准差阈值的参数为10,更改用于计算平均距离的邻域点数为6
分析上面四幅图 根据每次剔除后剩余的点云点数为Y轴,标准差为X轴制成Excel表格,制成图表对比
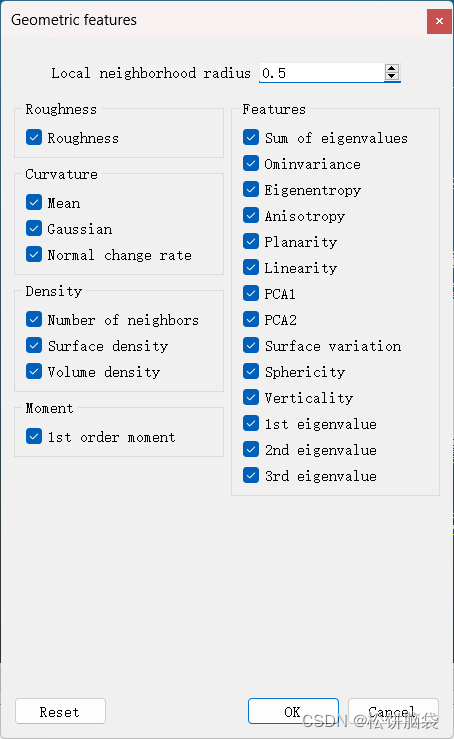
图4 固定标准差阈值的Excel表 可以看到,在值趋于5-6左右时,两者差值很小,与小于或者大于它的值差别大 分析:在使用SOR滤波器方法剔除离群点时,number of points to use for mean distance estimation值设为6,Standard deviation multiplier threshold(nSignma)值设为10,在这种情况下,算法将计算每个点与其6个最近邻的平均距离,并根据 nSigma * 标准差阈值过滤距离超出平均距离的点。这种设定可以充分去除离群点,同时保留较大对象的细节和形状特征,所以得到了最佳结果。 2、使用计算几何特征工具中的粗糙度、曲率、密度(表面密度、体积密度)、线性等方法分离道路,树,建筑物三个特征的点 2.1、【Tools】-【Other】-【Compute geometric features】,输入邻域范围,勾选全部计算值以便选取各要素的最优解
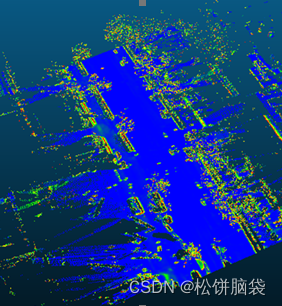
图5 勾选全部计算值以便选取各要素的最优解 之后在各点云数据属性的【Active】中可选择各种分割结果供分析
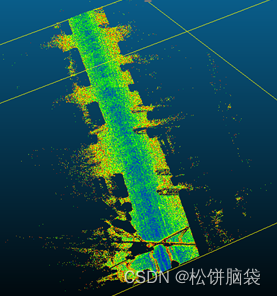
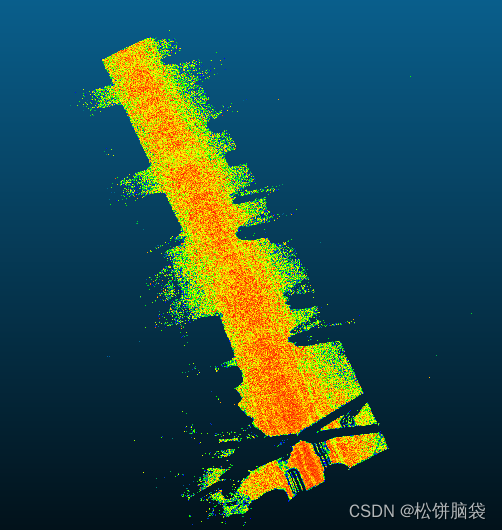
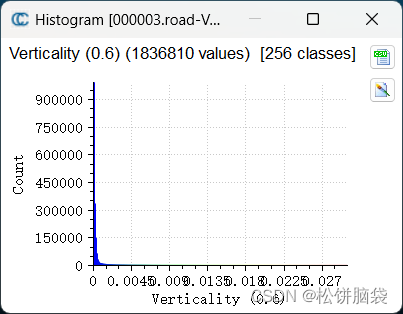
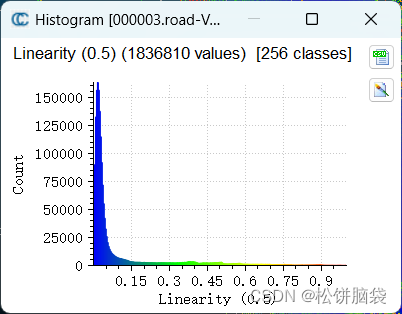
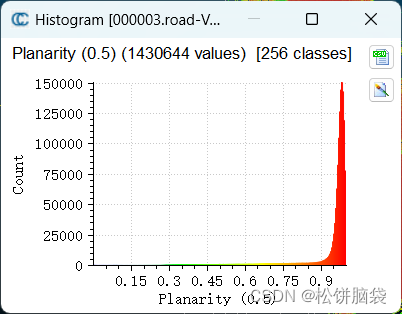
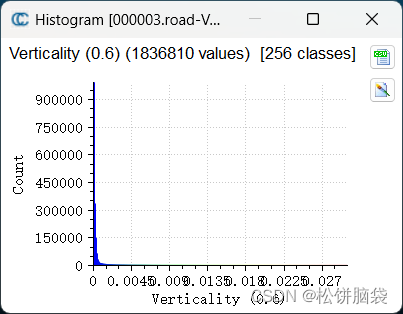
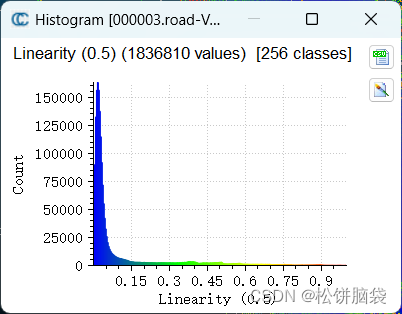
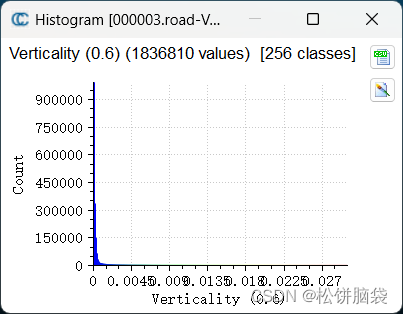
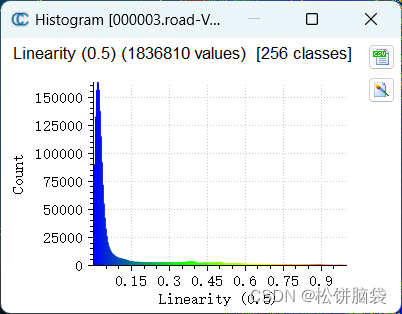
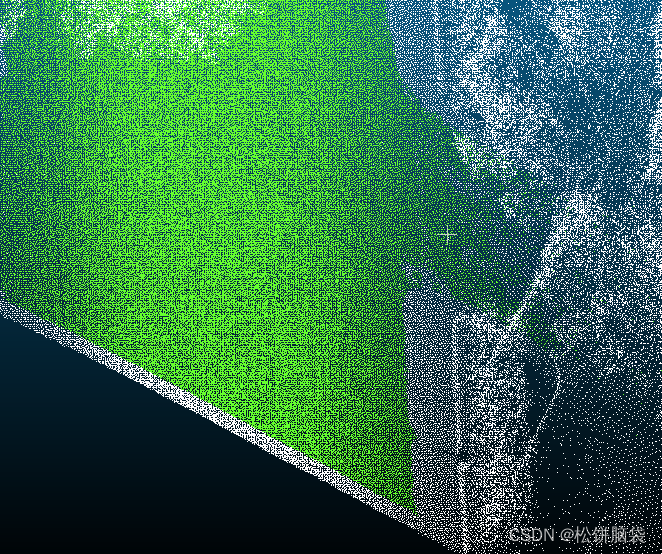
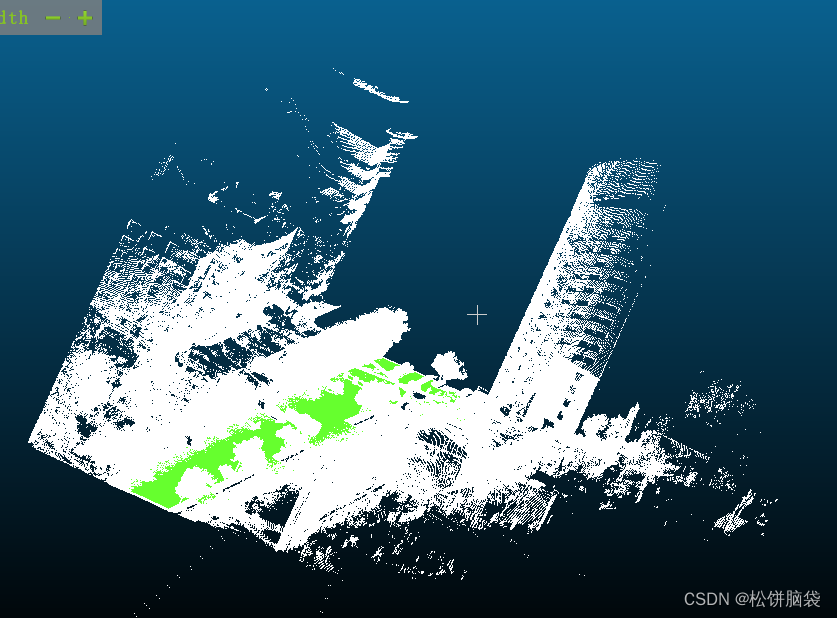
图6 各种计算方法的选择 2.2、打开各算法直方图分析选取出所要分割出的道路,树和建筑物的最佳算法 2.2.1、对道路的特征点来说,从结果分析发现 Verticality垂直度,linerity线性度和Planarity平面度三个算法对于道路的分割最有效 得到每次算法的结果后,对照直方图和结果图,使用【Filiter By Value】工具设置合适的【Range值】分割出点云数据以供下一步算法的使用
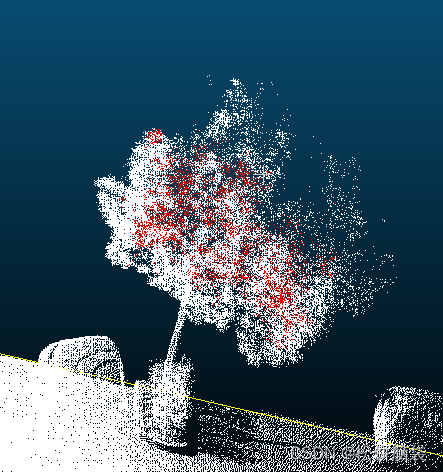
2.2.2、对树的特征点来说 Sphericity球形度,Surface variation表面变化率对于树的特征点的分割最有效 得到每次算法的结果后,对照直方图和结果图,使用【Filiter By Value】工具设置合适的【Range值】分割出点云数据以供下一步算法的使用
2.2.3、对建筑物的特征点来说 Verticality垂直度,Sphericity球形度最有效
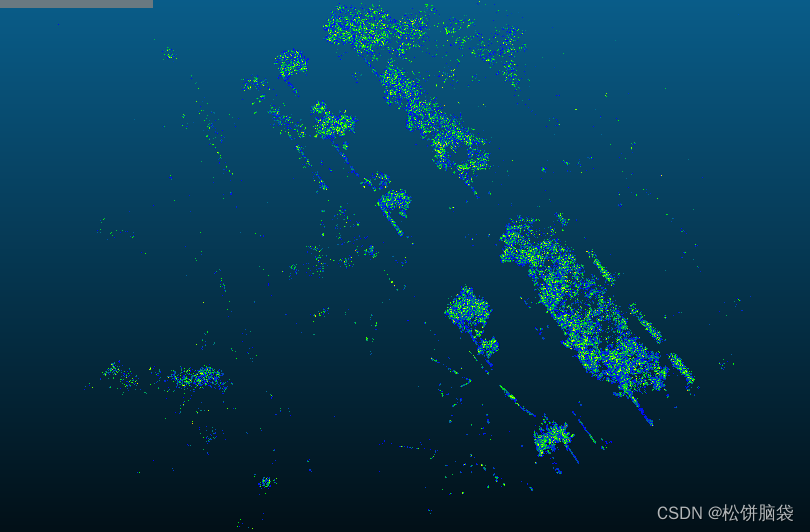
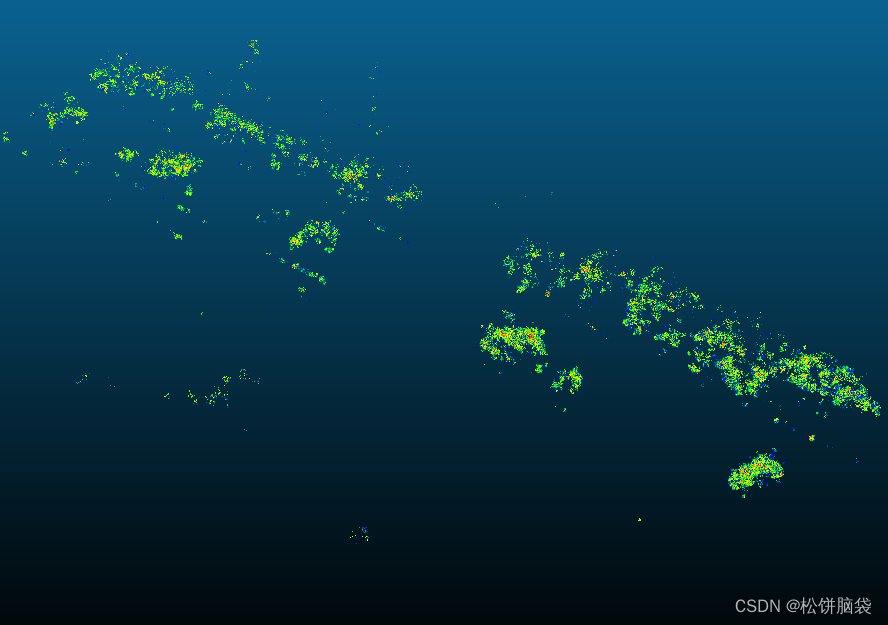
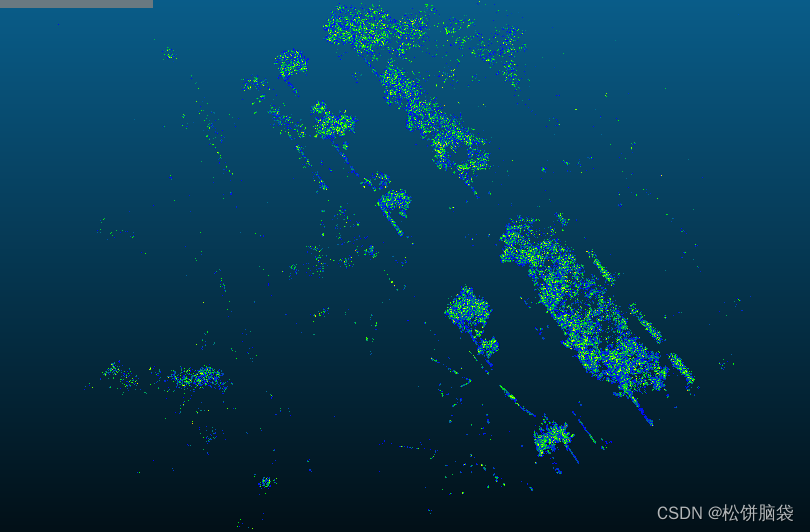
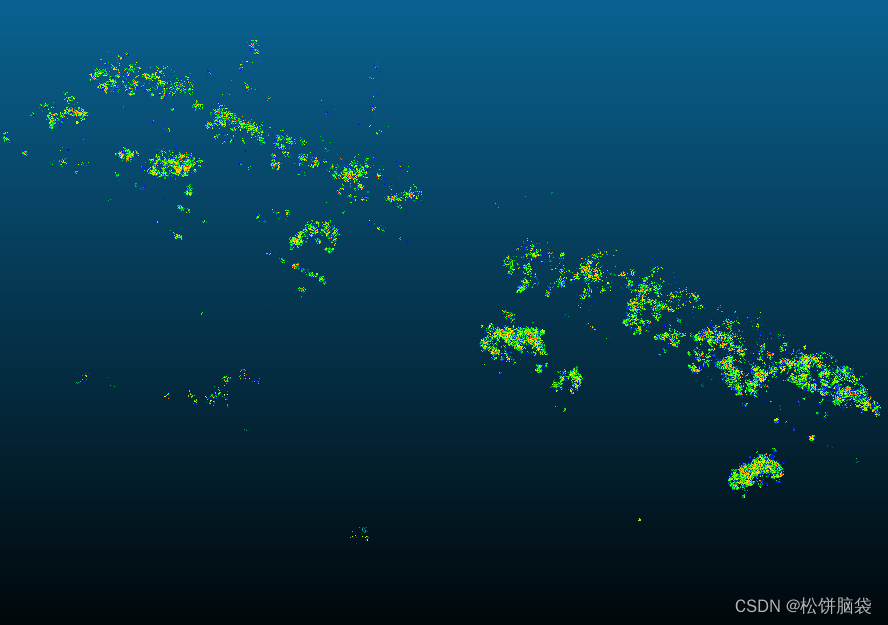
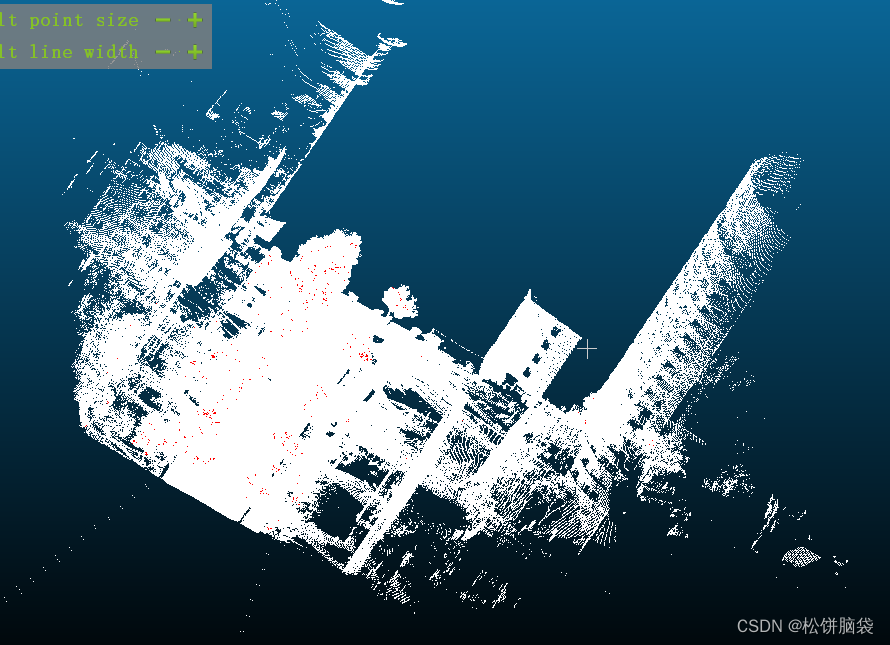
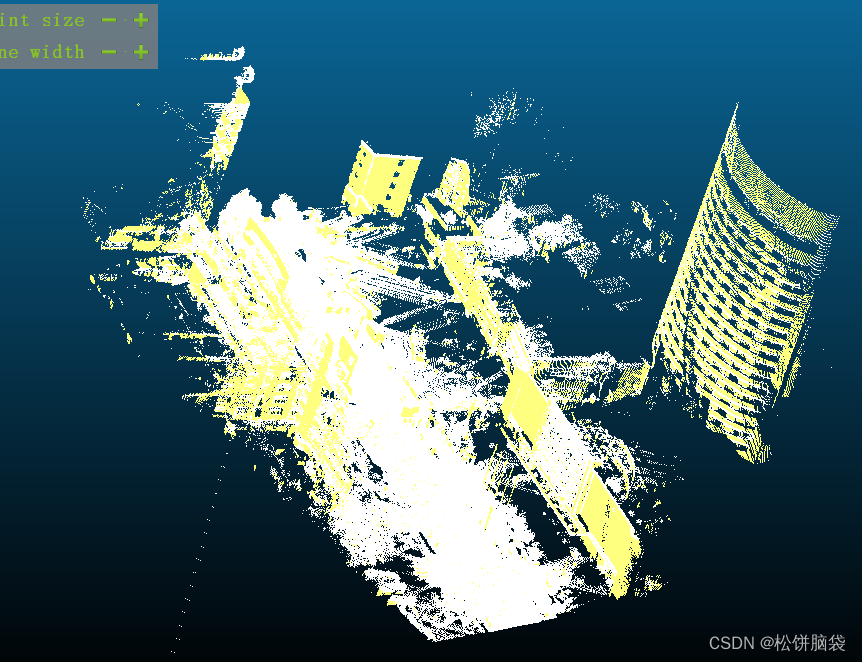
2.3、结果图 所分割要素设为唯一色,跟原始数据叠加对比,三个要素分别有三个局部图,三个完成图。
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

















 7068
7068











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









