







1. Moravec角点检测算子
Moravec角点检测的思想很简单,在图像上取
W∗W
的滑动窗口,不断移动窗口并检测窗口中像素变化情况E。像素变化情况可分三种:(1)如果在窗口中图像是平坦的,那么E的变化不大;(2)如果在窗口中的图像是一条边,那么在沿这条边滑动时E变化不大,而在沿垂直于这条边滑动时E变化很大;(3)如果在窗口中图像是一个角点,窗口沿任何方向移动E都会发生很大变化,即
Ex,y=∑u,vwu,v|Ix+u,y+v−Iu,v|2
其中,(x,y)就表示八个移动方向( ±1,0 ),( 0,±1 ),( ±1,±1 ),E是像素的变化值。
2. Harris角点检测算子
Harris角点检测算子实际上是对Moravec算子的改良,在原文中,作者提出了三点Moravec算子的缺陷并且给出了改良方法:
(1)Moravec算子对方向依赖性太强,Moravec算子实际上只移动了水平,垂直,和对角方向,为此,作者采用微分的思想:
Ex,y=∑u,v|Ix+u,y+v−Iu,v|2=∑u,vwu,v[xX+yY+o(x2,y2)]2
其中,
X=I∗(−1,0,1)≈∂I∂xY=I∗(−1,0,1)T≈∂I∂y
所以,E就可表示为:
E(x,y)=Ax2+2Cxy+By2
其中,
ABC=X2∗w=Y2∗w=XY∗w
(2)Moravec算子采用的是方形的窗口,E的响应比较容易受到干扰,Harris采用高斯核函作为平滑的窗口
wu,v=e−u2+v22σ2
(3)Moravec算子对于边缘响应过于灵敏(这个不是很明白作者的意思)
E(x,y)=(x,y)M(x,y)T
其中,
M=(ACCB)
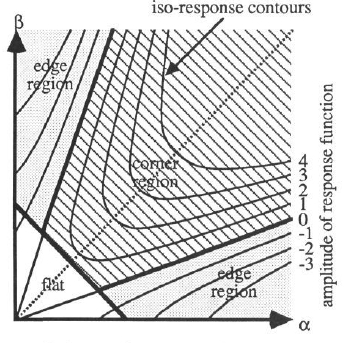
用 α,β 表示矩阵的特征值,A.如果 α,β 都很小,说明高斯windows中图像接近平坦;B.如果一个大一个小,则表示检测到边;C. 如果都很大,那么表示检测到了角点。
Harris定义了一个响应函数来表示
α,β
的大小关系:
R=αβ−k(α+β)2=det(M)−kTr(M)
k一般是一个远小于1的数,opencv的默认推荐值是0.04
R为正值时,检测到的为角点,R为负值时检测到的是边,R很小时检测到的是平坦区域
Harris角点检测算法具有旋转不变形,不具备尺度不变性
# congding:utf-8
from scipy.ndimage import filters
import numpy as np
from matplotlib.pyplot import *
def compute_harris_response(im,sigma=3):
'''在一幅灰度图像中,对每个像素计算Harris 角点检测器响应函数'''
# 计算导数
imx = np.zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (0,1), imx)
imy = np.zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (1,0), imy)
# 计算Harris 矩阵的分量
Wxx = filters.gaussian_filter(imx*imx,sigma)
Wxy = filters.gaussian_filter(imx*imy,sigma)
Wyy = filters.gaussian_filter(imy*imy,sigma)
# 计算特征值和迹
Wdet = Wxx*Wyy - Wxy**2
Wtr = Wxx + Wyy
return Wdet / Wtr
def get_harris_points(harrisim,min_dist=10,threshold=0.1):
""" 从一幅Harris 响应图像中返回角点。min_dist 为分割角点和图像边界的最少像素数目"""
# 寻找高于阈值的候选角点
corner_threshold = harrisim.max() * threshold
harrisim_t = (harrisim > corner_threshold) * 1
# 得到候选点的坐标
coords = np.array(harrisim_t.nonzero()).T
# 以及它们的Harris 响应值
candidate_values = [harrisim[c[0],c[1]] for c in coords]
# 对候选点按照Harris 响应值进行排序
index = np.argsort(candidate_values)
# 将可行点的位置保存到数组中
allowed_locations = np.zeros(harrisim.shape)
allowed_locations[min_dist:-min_dist,min_dist:-min_dist] = 1
# 按照min_distance 原则,选择最佳Harris 点
filtered_coords = []
for i in index:
if allowed_locations[coords[i,0],coords[i,1]] == 1:
filtered_coords.append(coords[i])
allowed_locations[(coords[i,0]-min_dist):(coords[i,0]+min_dist),(coords[i,1]-min_dist):(coords[i,1]+min_dist)] = 0
return filtered_coords
def plot_harris_points(image,filtered_coords):
""" 绘制图像中检测到的角点"""
figure()
gray()
imshow(image)
plot([p[1] for p in filtered_coords],[p[0] for p in filtered_coords],'*')
axis('off')
show()















 1010
1010

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









