






1 一些缩略语
| 缩略语 | 原词 | 含义 |
|---|---|---|
| ABS | Anti-Lock Braking System | 防抱死制动 |
| ALSE | Absorber- Lined Shielded Enclosure | 吸收塔内衬屏蔽外壳 |
| AMR | Anisotropic Magneto Resistive | 各向异性磁阻 |
| ASR | Acceleration Slip Regulation | 驱动防滑系统 |
| CCC | Capacitive Coupling Clamp | 电容耦合钳 |
| DUT | Device Under Test | 测试设备 |
| DVT | Design Validation Test | 设计验证测试 |
| EHB | Electro Hydraulic Brake | 电动液压制动 |
| EMC | Electro Magnetic Compatibility | 电磁兼容 |
| ESP | Electronic Stability Program | 电子稳定程序 |
| ESD | Electrostatic Discharge | 静电放电 |
| HCP | Horizontal Coupling Plane | 横向耦合平面 |
| ICC | Inductive Coupling Clamp | 电感耦合夹 |
| PVT | Product Validation Test | 产品验证测试 |
| PWM | Pulse-Width Modulation | 脉宽调制 |
| RF | Radio Frequency | 无线电频率 |
| TVS | Transient voltage Suppressor | 瞬态电压抑制器 |
| WSS | Wheel Speed Sensor | 轮速传感器 |
| DF30 | Wheel Speed sensor generation 30 | 轮速传感器30代 |
2 简单聊下什么是轮速传感器,以及它的功能
轮速传感器 DF30 是一个主动式的轮速传感器,是制动系统的一部分,它有两根线,可以提供轮速信息还有一些其他的信息,但是这个还要看轮速传感器的具体型号(比如空气间隙,是否处于静止状态,还有旋转方向)
轮速传感器一定需要连接在恒压源上才能正常工作,它会通过旋转体的转速并根据“各向异性磁阻” 效应来检测磁场的变化进而产生调制的电流信号,轮速传感器可以检测到铁盘,钢板或者磁化的编码器的旋转。
3 产品的使用
3.1 期望的用法
轮速传感器仅局限用在有限的车辆,发动机或者一些机器上。
本文章描述了所有的轮速传感器被用在制动系统上的所有的测试情况,列出了在何种使用条件下可以发挥出传感器的正常功能,本文还有该传感器和ECU的接口
3.2 不期望的用法
很多话,大概意思是如果不合理使用该传感器,不承担责任
3.3 警告
关于传感器拆装的要求
4 定义
4.1 轮速传感器
传感器包含两个部分
- 轮速传感器的头部
- 线束部分分两种,一种是带卡扣的,一种是不带卡扣的
4.2 关于连接器系统
写了什么是连接器
4.3 关于传感器的可以识别信号的区域
看图纸
4.4 关于空气间隙
看图纸
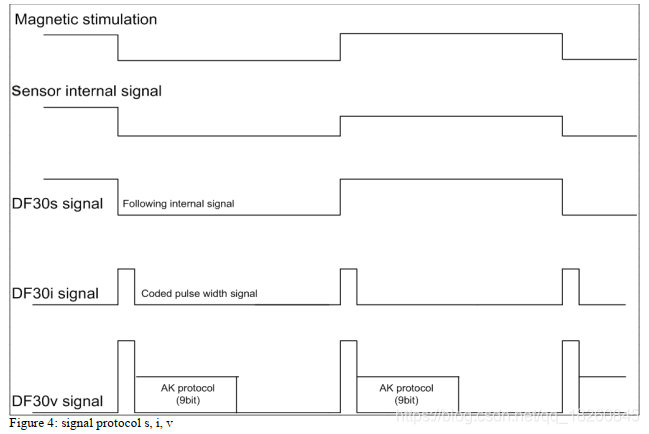
4.5 轮速传感器的信号协议
有两种信号可以选择
- “s”协议的信号可以随着转速信号变化产生方波
- “i”协议是一个方波,不过是脉宽调制的,方波的脉宽和脉冲的数量会包含一些其他的信息,一个方波和下一个方波的时间确定了转速信息
- “v”协议是一个三电平的电流信号,提供了转速信息还有一些其他的信息,串口的协议遵循“AK-协议”
此传感器在每次检测到电磁信号发生后触发,因此此传感器信号的频率是“s”协议的两倍
5 一些关键的数据
5.1 测量原理
利用AMR效应进行微分磁通密度测量
5.2 安装信息
看图纸
5.3 储存环境
正常情况下10年
5.4 运输
//
5 使用的环境信息
//正常使用
6 电气参数
电气原理图
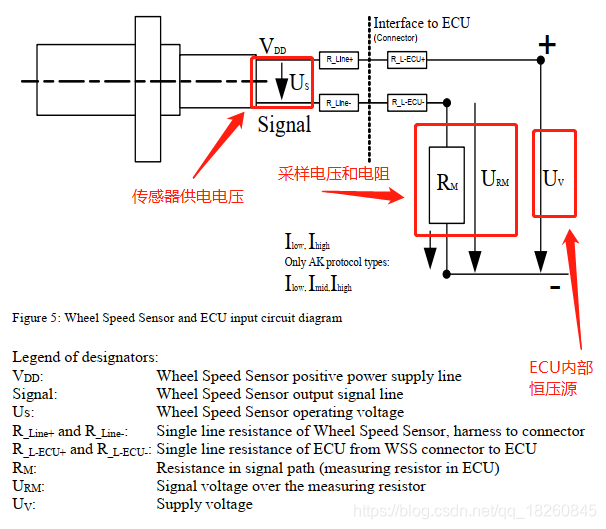
6.2 供电电压
6.2.1 传感器的供电电压 Us, s- 和 i- 的型号
供电电压的范围Us(直接到传感器终端的,不包含任何的附加的电路)
| 项目 | 值 |
|---|---|
| 最小电压(关阀) | 3.8V |
| 最小电压(开阀) | 4.8V |
| 最大的电压 | 20V |
6.2.2 传感器的供电电压 Us, v-型号
供电电压的范围Us(直接到传感器终端的,不包含任何的附加的电路)
| 项目 | 值 |
|---|---|
| 最小电压(关阀) | 4V |
| 最小电压(开阀) | 6V |
| 最大的电压 | 20V |
6.3 过压
22V
6.4 反向电压
反向电压不能高于 -16V
6.5 最小的测量电阻选型
| 项目 | 值 |
|---|---|
| 最小电阻 | 15 Ohm |
| 最大电阻( s-和i-型) | 75 Ohm |
| 最大电阻(v-型) | 50 Ohm |
6.6 导线的电阻
//
6.7 电压电阻
//
6.8 绝缘电阻
//
7 信号说明
7.1 说明
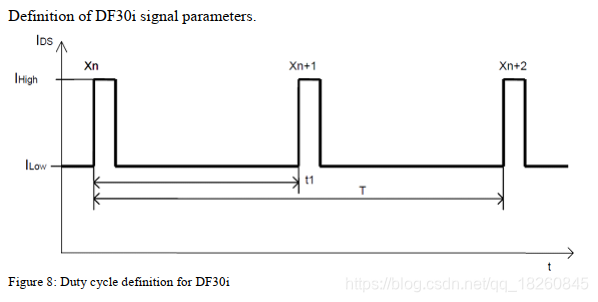
7.1.1 信号周期
每个信号周期都是一个方波,信号的质量和传感器距离,传感器性能,环境因素有关
7.1.2 信号变化速率
信号上升和下降的斜率:3.3 - 29mA/ μ s \mu s μs
7.1.3 支持的输出或注入频率
电磁信号的输入频率:0 - 3000Hz
s- 型号的输出频率:0 - 3000Hz
i-型号和v-型号的输出频率:0 - 6000Hz
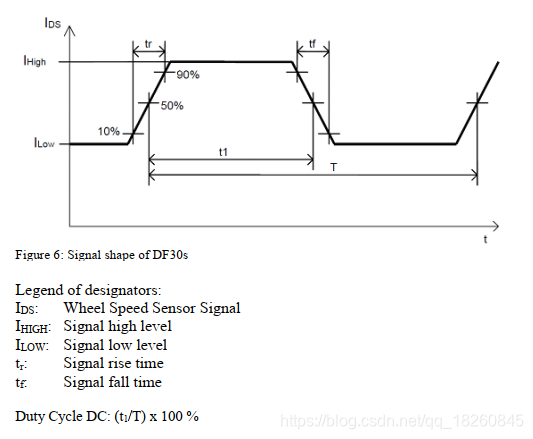
7.2 s- 型号传感器信号解析
7.2.1 信号的波形
DF30的 -s 型号的传感器的输出波形是一个方波,有两个电压等级,信号的理想占空比是50%,信号和产生频率和外部激励有关系,比如轮速。DF30的一个信号激励响应两个电磁信号的边缘
7.2.2 电流信号等级
| 项目 | 值 |
|---|---|
| 低电流 | 5.9-7-8.4mA |
| 高电流 | 11.8-14-16.8mA |
| 高电流和低电流比 | 1.8-2-2.3 |
| 安全状态电流 | 3mA |
7.2.3 在车辆启动或下电的过程中信号的表现
| 名称 | 备注 | 最小值 | 类型 | 最大值 | 单位 |
|---|---|---|---|---|---|
| 对于第一个输出信号所需要的电磁脉冲的数量 | 2 | edge | |||
| 上电时间 | 1 | ms | |||
| 初始标定的延迟时间 | 300 | μ s \mu s μs |
在传感器上电的1.3ms的过程中,即使有电磁信号接收,也不会输出电信号
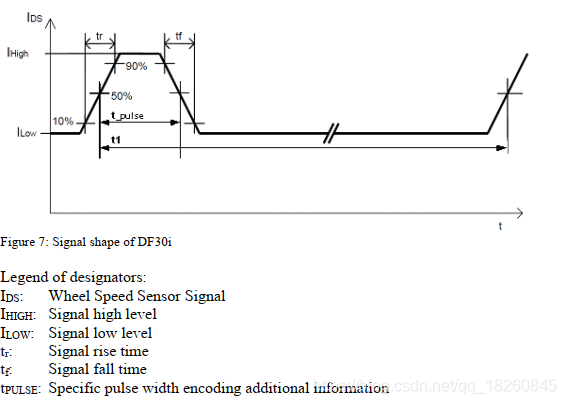
7.3 i- 类型传感器信号解析
7.3.1 整体的协议
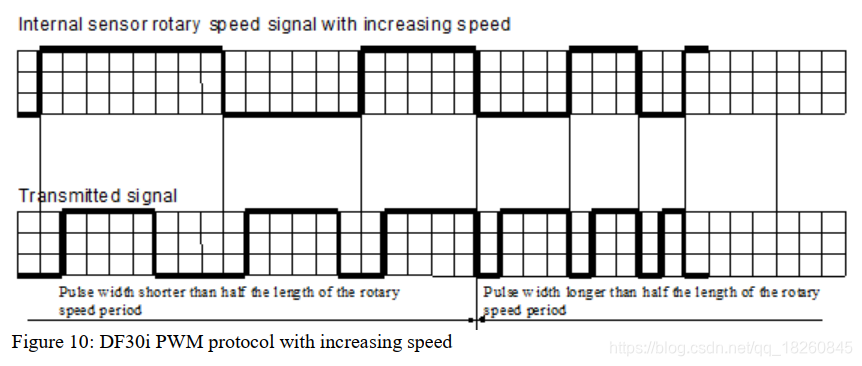
i- 类型的DF30传感器的输出信号是电流的方波,还有一些标识附加信息的脉冲,比如在脉冲的后面180
μ
s
\mu s
μs的脉冲来表示旋转的方向,传感器在每一次电磁信号的两边过后生成一个大的脉冲,因此输出信号的频率是s型号的两倍
原则上讲,表征转速信号的脉冲应该放在高脉冲之前,这样的话,可以保证即使在高转速下,转速的信息可以保证发出来,但是转速高的时候,附加的信息有可能不被识别,在7.3.4章节将介绍附加信息
PWM中带有附加信息的转速信号的通信协议:

7.3.2 电流信号级别
| 项目 | 值 |
|---|---|
| 低电流 | 5.9-7-8.4mA |
| 高电流 | 11.8-14-16.8mA |
| 高电流和低电流比 | 1.8-2-2.3 |
| 安全状态电流 | 3mA |
7.3.3 PWM协议中的时间参数
| 名称 | 简称 | 备注 | 最小脉宽 | 典型脉宽 | 最大脉宽 | 单位 |
|---|---|---|---|---|---|---|
| 识别到输入和开始发脉冲的时间间隔 | T p r e l o w T_{pre_low} Tprelow | 识别到输入和开始发脉冲的时间间隔 | 38 | 45 | 52 | μ s \mu s μs |
| 气隙储备 | LR | 识别到气隙误差的时间,LR信号主导DR和EL信号 | 38 | 45 | 52 | μ s \mu s μs |
| 向左转 | DR-L | 在转速为v1以上的时候,脉宽的宽度随着车速信号的边缘而降低 | 76 | 90 | 104 | μ s \mu s μs |
| 向右转 | FR-R | 在转速v2以上的时候,脉宽的宽度随着车速信号的边缘而降低 | 153 | 180 | 207 | μ s \mu s μs |
| 向左转+装配位置 | DR-L/EL | 在转速v3以上的时候,脉宽的宽度随着车速信号的边缘而降低 | 306 | 360 | 414 | μ s \mu s μs |
| 向右转+装配位置 | DR-R/EL | 在转速v4以上的时候,脉宽的宽度随着车速信号的边缘而降低 | 616 | 720 | 828 | μ s \mu s μs |
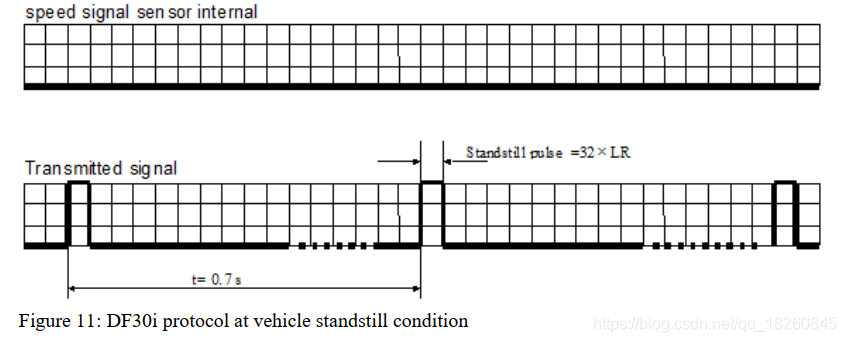
| 静止的时候的脉宽 | t S T O P t_{STOP} tSTOP | 如果车辆停止的时候,脉宽宽度为 t P u l s e − S t o p t_{Pulse-Stop} tPulse−Stop的脉冲信号将会在 t S t o p t_{Stop} tStop时间后循环的发出,知道再次转起来 | 1232 | 1440 | 1656 | μ s \mu s μs |
| 停止预先信号 | T S T O P T_{STOP} TSTOP | 如果不转的时间超过 t s t o p t_{stop} tstop,将会循环的发射脉宽宽度为 t P u l s e − S t o p t_{Pulse-Stop} tPulse−Stop的信号,如果当前供电电压欠压的时候也会发出,知道再次转起来 | 590 | 737 | 848 | ms |
注意下下面的可能的情况:
DR-L/EL 或者DR-R/EL信号只有在电磁信号触发的频率小于117Hz的时候才触发,高于这个频率范围的时候,将会被信号DR-L和DR-R来代替
7.3.4 高速的时候的PWM协议
达到最高的频率之前,输出信号的脉宽可以全部按照最长来输出,但是高于频率以后,只能用短脉宽输出
一般来说,EL信息的输出频率仅为117hz左右
脉冲的宽度和输出频率的关系在一个脉冲
7.3.5 当车辆停止的时候的协议
当车辆停止的时候,传感器每737ms发一个1440
μ
s
\mu s
μs的脉冲信号,直到恢复车速
7.3.6 在车辆刚上电或从欠压状态恢复后的表现
//主要表达是需要一段时间才能识别出电磁信号
7.4 v-型号传感器解析
//这一块的信息就不详细描述了,就是一个转速脉冲信号后面跟着几个小脉冲,类似于串口通讯,有需要的时候再了解吧

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









