









前言
主动轮廓线模型,又叫做Snake模型。它对噪声和对比度不敏感,能够将矿堆从具有复杂车辙等噪声的地面背景中提取出来。Snake的主要原理是在我们提供一个原始轮廓以后,对其定义能量函数,使轮廓沿着能量降低的方向靠近,当能量函数达到最小的时候,我们就认为原始轮廓已经收敛到矿堆的真实轮廓。Snake的能量函数分为内部能量函数和外部能量函数,其中内部能量控制轮廓的平滑和连续。外部能量控制着收敛。具体公式和介绍就不详细展开说了。
环境
opencv 2.4 + vs2017
- 小坑: opencv3.x版本以后更改了协议,删掉了一些模块,恰好包要用到的cvSnakeImage();而官网下载的2.x版本仅仅兼容到vs2015以前,所以需要自己手动编译一下,得到与vs2017兼容的opencv版本。
- 网上也看到有人自己将2.x版本的函数移植到3.0的代码。
程序
程序大概就是在得到大概位置的基础上,利用opencv中的cvSnakeImage函数进行轮廓收敛,进一步精确提取轮廓位置
#include <iostream>
#include <string.h>
#include <cxcore.h>
#include <cv.h>
#include <highgui.h>
#include <fstream>
#include "legacy/legacy.hpp"
IplImage *image = 0; //原始图像
IplImage *image2 = 0; //原始图像copy
using namespace std;
int Thresholdness = 141;
int ialpha = 20;
int ibeta = 20;
int igamma = 20;
void onChange(int pos)
{
//50:150,40:170
if (image2) cvReleaseImage(&image2);
if (image) cvReleaseImage(&image);
image2 = cvLoadImage("F:\\100MSDCF\\toyobjects.png", 1); //显示图片
image = cvLoadImage("F:\\100MSDCF\\toyobjects.png", 0);
int x1, x2,y1,y2;//初始轮廓具体坐标
x1 = 40;
x2 = 170;
y1 = 50;
y2 = 150;
int length = 48;
CvPoint* point = new CvPoint[length]; //分配轮廓点
CvSeqReader reader;
CvPoint pt = cvPoint(40,50);
int i = 0;
int step = 10; //定义步长
for (int xx = x1; xx < x2; xx+= step) {
pt = cvPoint(xx,y1);
point[i] = pt;
printf("%d %d\n",xx,y1);
i++;
}
for(int yy = y1 ; yy <y2 ; yy+= step){
pt = cvPoint(x2,yy);
point[i] = pt;
printf("%d %d\n", x2, yy);
i++;
}
for (int xx = x2; xx >= x1; xx-= step) {
pt = cvPoint(xx,y2);
point[i] = pt;
printf("%d %d\n", xx, y2);
i++;
}
for (int yy = y2; yy >= y1; yy-= step){
pt = cvPoint(x1, yy);
point[i] = pt;
printf("%d %d\n", x1, yy);
i++;
}
printf("i :%d length:%d ",i,length);//debug
//显示轮廓曲线
for (int i = 0; i<length; i++)
{
int j = (i + 1) % length;
cvLine(image2, point[i], point[j], CV_RGB(0, 0, 255), 1, 8, 0);
}
float alpha = ialpha / 100.0f;
float beta = ibeta / 100.0f;
float gamma = igamma / 100.0f;
CvSize size;
size.width = 3;
size.height = 3;
CvTermCriteria criteria;
criteria.type = CV_TERMCRIT_ITER;
criteria.max_iter = 1000;
criteria.epsilon = 0.1;
cvSnakeImage(image, point, length, &alpha, &beta, &gamma, CV_VALUE, size, criteria, 0);
//显示曲线
for (int i = 0; i<length; i++)
{
int j = (i + 1) % length;
cvLine(image2, point[i], point[j], CV_RGB(0, 255, 0), 1, 8, 0);
}
delete[]point;
}
int main(int argc, char* argv[])
{
cvNamedWindow("win1", 0);
cvCreateTrackbar("alpha", "win1", &ialpha, 100, onChange);
cvCreateTrackbar("beta", "win1", &ibeta, 100, onChange);
cvCreateTrackbar("gamma", "win1", &igamma, 100, onChange);
cvResizeWindow("win1", 300, 500);
onChange(0);
for (;;)
{
if (cvWaitKey(40) == 27) break;
cvShowImage("win1", image2);
}
return 0;
}
实验效果
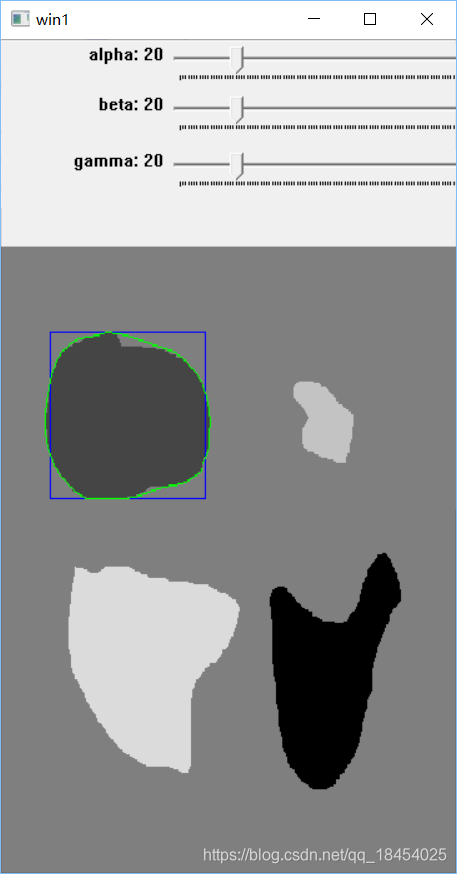
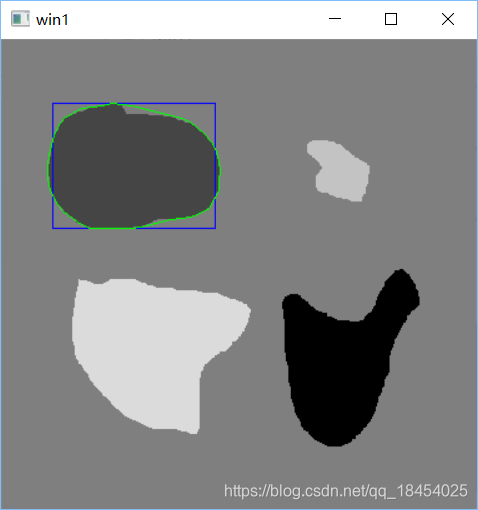
- 测试图片为matlab里面主动轮廓模型的示例图片。

















 2329
2329

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









