







自述:该方法的核心是将像素转换成距离场,当目标区域与背景区域分割效果较好时,能量达到最小,即能量最不活跃。
由于时间的关系,没有将此文献完全看懂并且与代码对应;代码中的kappa关于曲率或者散度的计算与该论文给定的散度div计算公式不能实现匹配,这是导致没有继续研究的技术问题;
文献:
1、TFT-LCD Mura缺陷机器视觉检测方法研究-卢小鹏(本文主要参考)
2、https://www.ncbi.nlm.nih.gov/pmc/articles/PMC2796112/局部区域分割
3、http://www.shawnlankton.com/?s=chan-vese局部区域分割的相关代码
4、http://mathworld.wolfram.com/Curvature.html曲率的计算
5、https://www.mathworks.com/matlabcentral/fileexchange/23445-chan-vese-active-contours-without-edges Chan-vese分割代码
6、http://www.mathworks.com/matlabcentral/fileexchange/30284-active-contours-implementation—test-platform-gui/content/Activeontours/localized_seg.m代码
7、A level set approach for computing solutions to incompressible twophase flow
停止迭代的条件一
1、主动轮廓模型
1988年,Kass等人提出了主动轮廓模型,将图像分割问题转换为求解能量泛函最小值问题,为图像分割提供一种全新的思路,称为研究的重点和热点。主动轮廓模型的主要原理通过构造能量泛函,在能量函数最小值驱动下,轮廓曲线逐渐向待检测物体的边缘逼近,最终分割出目标。由于主动轮廓模型利用曲线演化定位目标的边缘,因此也称为Snake模型。主动轮廓模型是当前应用最多的利用变分思想求解的图像分割方法。其最大优点是在高噪声的情况下,也能得到连续、光滑的闭合分割边界。按照能量函数构造方式的不同,可以将主动轮廓模型主要分为基于边缘和基于区域两类,同时也有一些研究人员提出了基于边缘和区域相结合的主动轮廓模型。
2、基于边缘的主动轮廓模型
目标的边缘是表征目标的重要信息,也是分割目标的重要依据。Kass等人提出的Snake模型是一种典型的基于边缘的主动轮廓模型,其主要是根据目标边缘的梯度跳变来检测目标的。
对于图像 I(x,y),C(S)=C(x(s),y(s)) 为图像内的演化曲线,则Snake模型的能量函数定义为:
Jint 是与轮廓曲线内部的信息相关的内部能量项,使轮廓曲线在演化过程中保持连续性和光滑性;
Jext 是与图像信息相关的外部能量项,也叫图像力,在外部能量项作用下,轮廓曲线向目标的边缘逼近。
Jcons 是约束项,为曲线的演化提供约束,使分割结果更加准确,有时也可以忽略。
内部能量定义为:
Jcoutin 为能量连续项;
α(s) 为弹性系数,控制着轮廓曲线向目标延伸,并保持连续性;
Jsmooth 为光滑能量项;
β(s) 为刚性系数,控制着轮廓曲线随着目标的形状发生的凹凸程度,并且保持轮廓曲线的光滑性。
外部能量项由图像的信息决定,可以选择表征图像全局特征的标量表示。考虑到目标边缘处的梯度跳变,通常以图像的梯度来定义外部能量项:
外部能量驱动着轮廓曲线向目标收敛,系数 gamma(s) 用以调整收敛的步长, ∇I 为图像的梯度信息。
约束项可以根据图像的特点人为的设定,用以排除非目标区域,提高模型对图像的适应能力,使分割更加准确。在Kass等人提出Snake模型时,并未给出约束项,仅仅依靠内部能量项和外部能量项的作用驱动轮廓曲线向目标收敛,最终分割出目标。
综上所述,则Snake模型的能量函数的具体表达式为:
通过求解上式的最小值,使轮廓曲线收敛在图像的最大梯度点,而图像的最大梯度一般在目标的边缘处取得,也即检测出了目标的边缘。
为了克服原始的Snake模型的不足,Cohen等人把气球力引入到Snake模型,使轮廓曲线可以越过非目标边界的局部极值点。但气球力依靠其系数的正负来决定轮廓曲线的收敛方向,而这一系数的正负是固定的,无法自适应轮廓曲线的初始位置变化,因此该模型的应用受到了局限。
而后,Caselles等人又在Snake模型的基础上提出了测地线主轮廓模型,通过选择合适的停止函数,使演化曲线停止在目标边界。测地线祝轮廓模型摆脱了初始轮廓曲线的位置对检测结果的影响,在很大程度上改进了Snake模型。
但是,无论是Sanke模型还是测地线主动轮廓模型,都是基于图像的梯度信息来判断目标的边缘,当图像的背景复杂或者是目标的边缘模糊时,无法准确的定位目标的边缘,造成检测结果不准确。
3、基于区域的主动轮廓模型
C-V是一个典型的区域主动轮廓模型,它以图像的像素灰度信息作为能量,巧妙的构造能量函数,然后通过求取能量函数的最小值,最终把目标分割出来。
假设待分割的图像为 I ,
Ein(C) 表示闭合曲线 C 的内部能量;
c0 表示内部区域的平均灰度;
cb 表示外部区域的平均灰度用。
闭合曲线 C 与待分割目标的位置关系如下图所示:
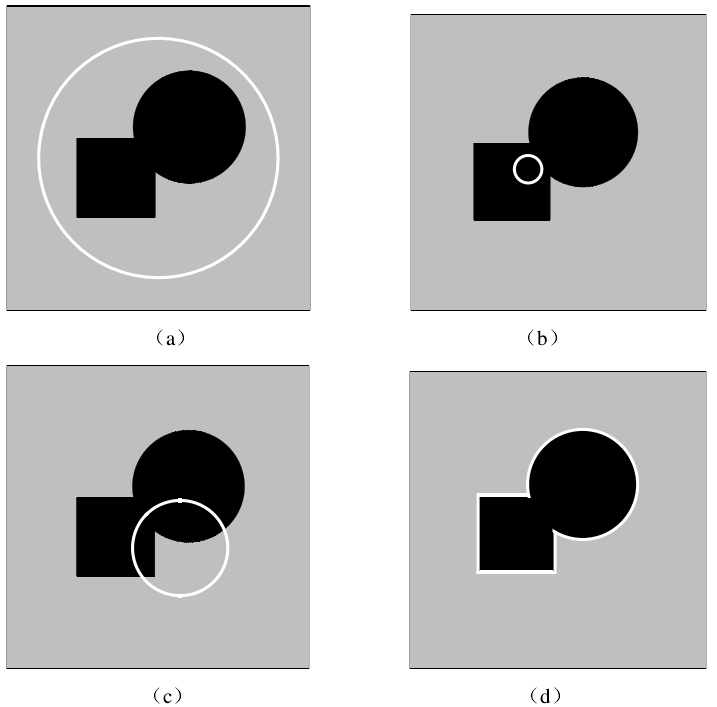
Figure 1. 闭合曲线
假设待分割图像 I 的背景均匀,目标内部也均匀。
(a)当曲线
(b)当曲线 C 位于待分割目标的内部,
(c)当曲线 C 的内部区域同时包含目标和背景,
(d)当曲线 C 恰好处于目标边缘时,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3101
3101

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









