







前言 机器人的分类
超大型机器人:负载能力 1000 kg 以上
大型机器人:100-1000 kg / 10 m2 以上
中型机器人:10-100 kg / 1 –10 m2
小型机器人:0.1-10 kg / 0.1-1 m2
超小型机器人:0.1 kg 以下 / 0.1 m2 以下
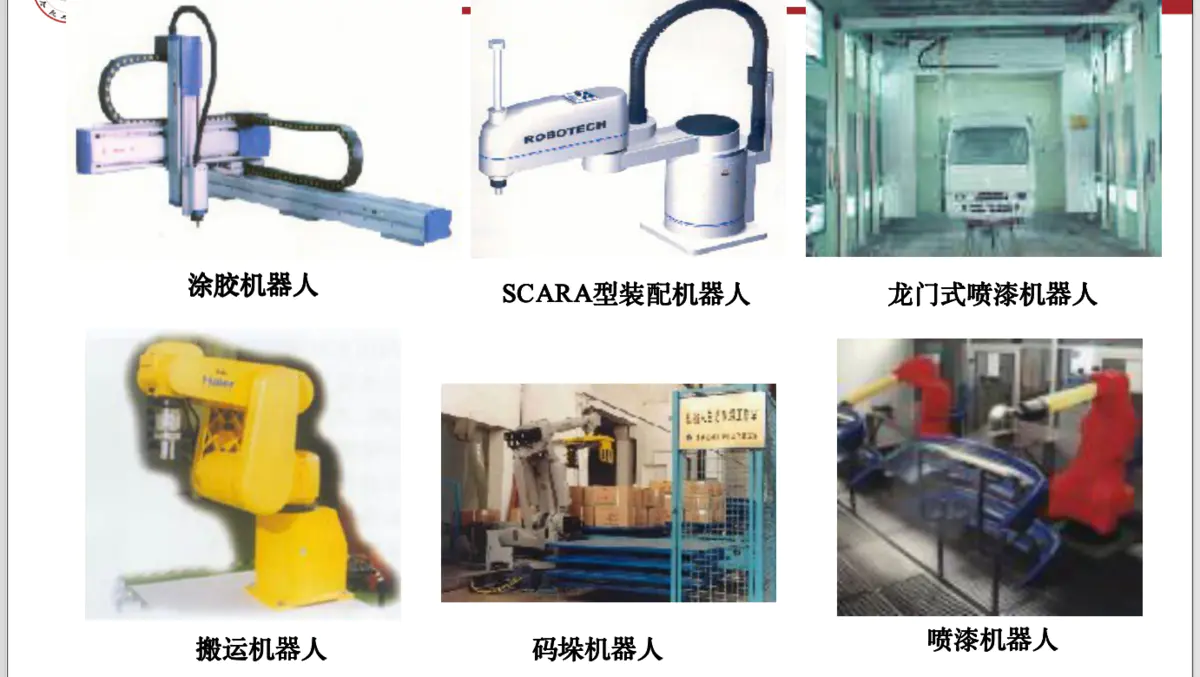
按功能分类
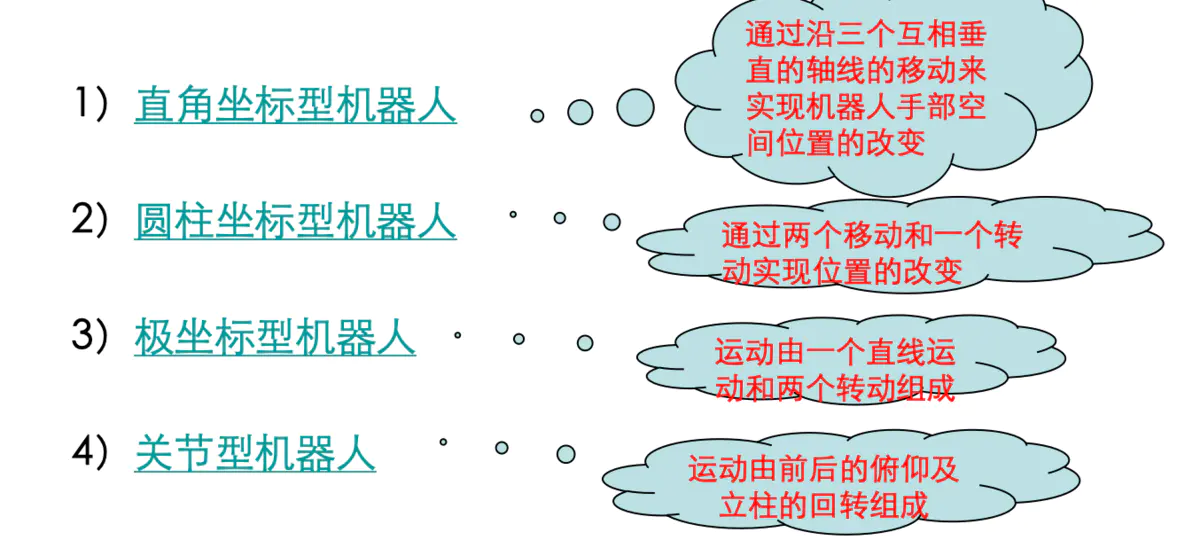
按结构坐标分类
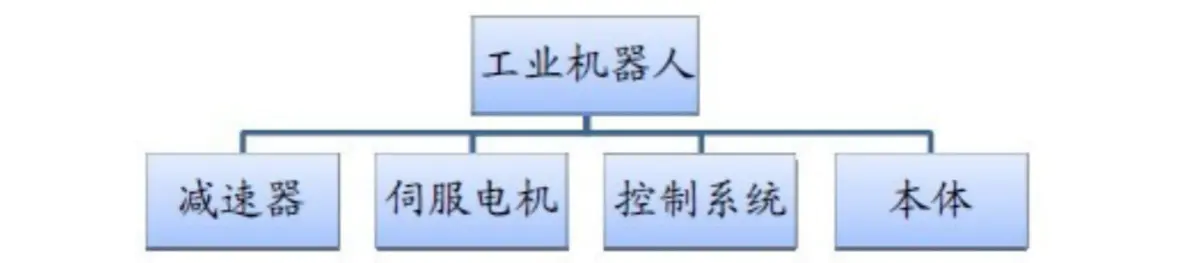
工业机器人四大部件
减速机
机器人减速器通常有RV减速器 和 谐波减速器两种。
相比于谐波减速器,RV减速器具有更高的刚度和回转精度。因此在关节型机器人中,一般将RV减速器放置在机座、大臂、肩部等重负载的位置;而将谐波减速器放置在小臂、腕部或手部。
目前,全球减速器市场被日本 纳博特斯克 和 哈默纳克 两家公司垄断。并与机器人用户签订独家供货协议。
国内秦川和绿的有对应产品,但与国外差距较大。
控制器
控制器是机器人的大脑,发布和传递动作指令。包括硬件和软件两部分:
硬件就是工业控制板卡,包括一些主控单元、信号处理部分等电路
软件部分主要是控制算法、二次开发等
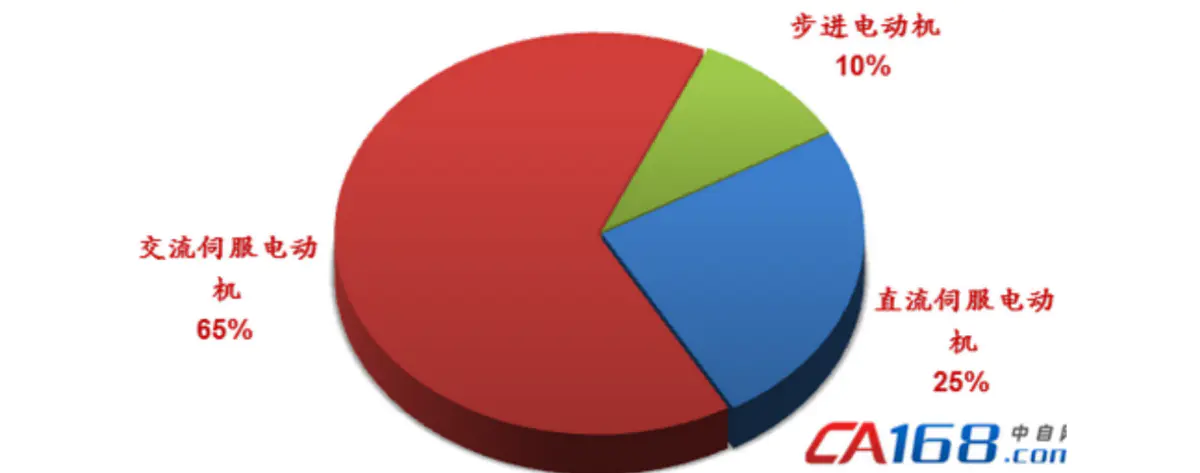
伺服控制系统
伺服系统是一种以机械位置或角度作为控制对象的自动控制系统,一般包括伺服驱动器和伺服电机。使用在伺服系统中的驱动电机要求具有响应速度快、定位准确、合适转动惯量。
工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。
电机用于驱动机器人的关节,要求是要有最大功率质量比和扭矩惯量比、高启动转矩、低惯量和较宽广且平滑的调速范围。特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电动机,尤其是要求快速响应时,伺服电动机必须具有较高的可靠性,并且有较大的短时过载能力。
从使用上的角度来分析:�1、频矩特性:伺服电机>步进电机�2、控制精度:伺服电机>步进电机
3、低频特性:伺服电机>步进电机�4、过载能力:伺服电机>步进电机
5、控制性能:伺服电机>步进电机
6、响应特性:伺服电机>步进电机
传感器
- 2D 3D视觉传感器
- 力矩传感器
力扭矩传感器是一种可以让机器人知道力的传感器,可以对机器人手臂上的力进行监控,根据数据分析,对机器人接下来行为作出指导 - 碰撞检测传感器/安全传感器
- 其他传感器
除了这些还有其他的许多传感器,比如焊接缝隙追踪传感器,要想做好焊接工作,就需要配备一个这样的传感器,还有触觉传感器等等。传感器为工业机器人带来了各种感觉,这些感觉帮助机器人变得更加智能化,工作精确度更高
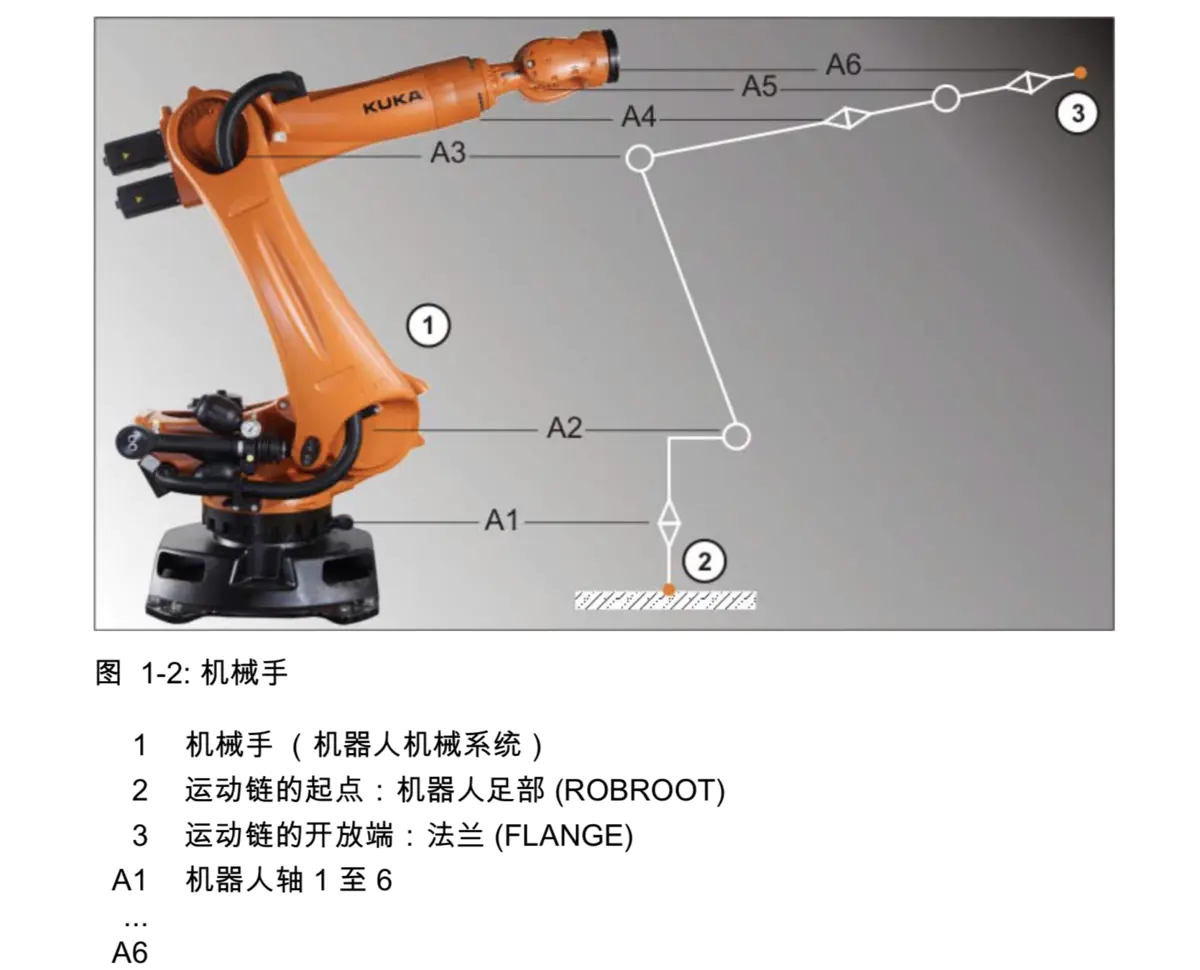
一、机器人系统结构和功能
1.1 机器人的组成


相关参数:
轴数:4轴(SCARA 斯卡拉 平面关节型机器人);6轴
作用范围:0.35~3.9 M
重复精度:0.015~0.2 MM
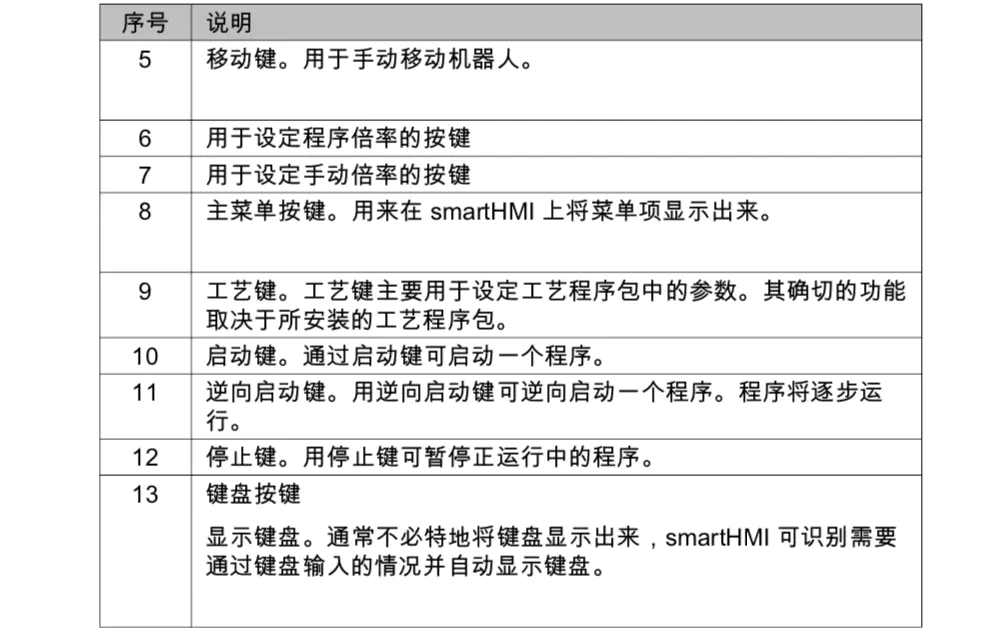
1.2 Smart Pad 介绍

二、机器人运动
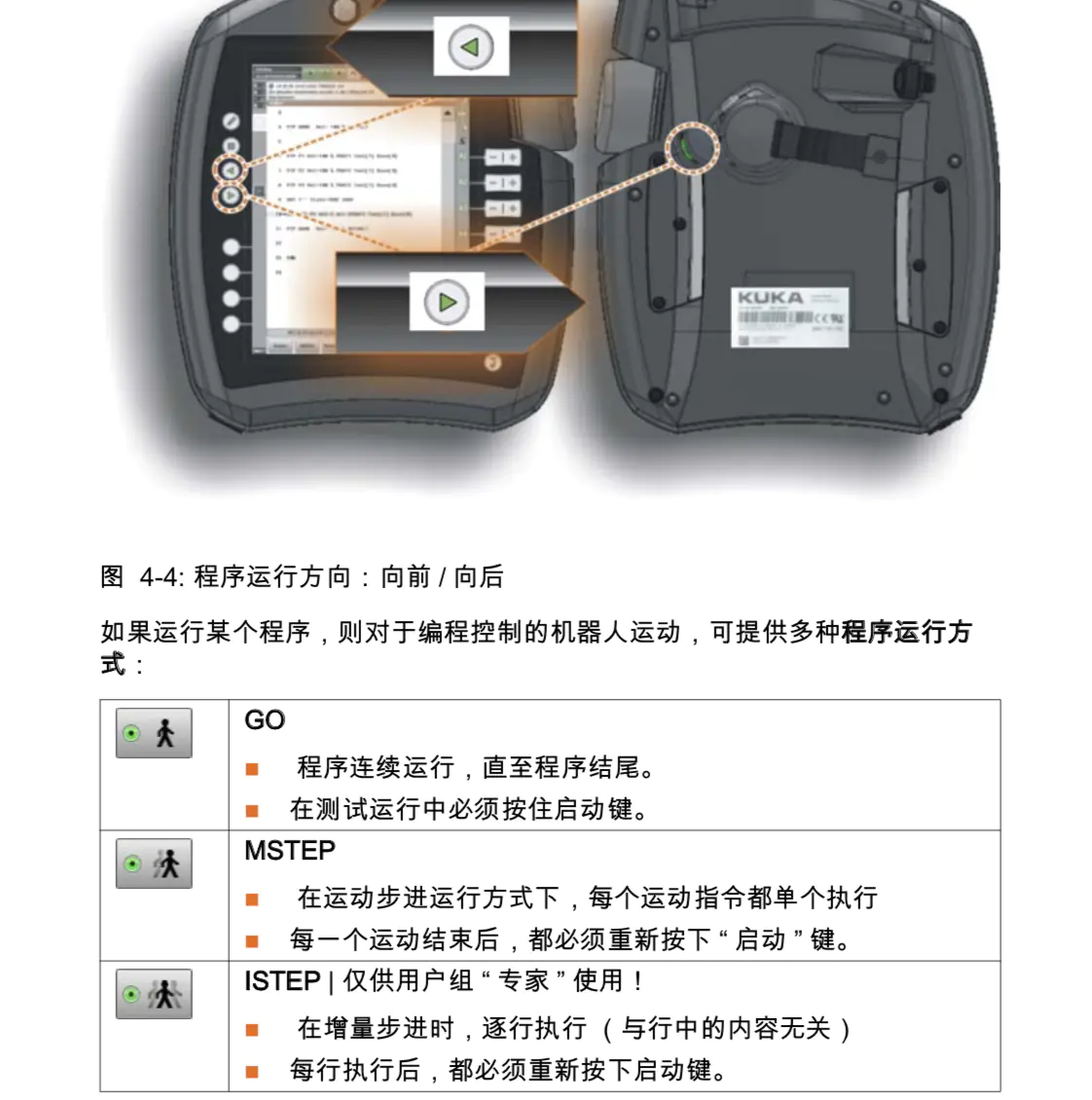
2.1 运行方式
T1:手动慢速运行,用于测试、编程示教,最大速度250mm/s
T2:手动快速运行,用于测试运行,看看实际效果,速度为设定速度
AUT:自动运行,用于不带 上级控制系统的机器人
AUT-EXT:外部自动运行,用于带 上级控制系统(PLC)的机器人
2.2 与机器人相关的坐标
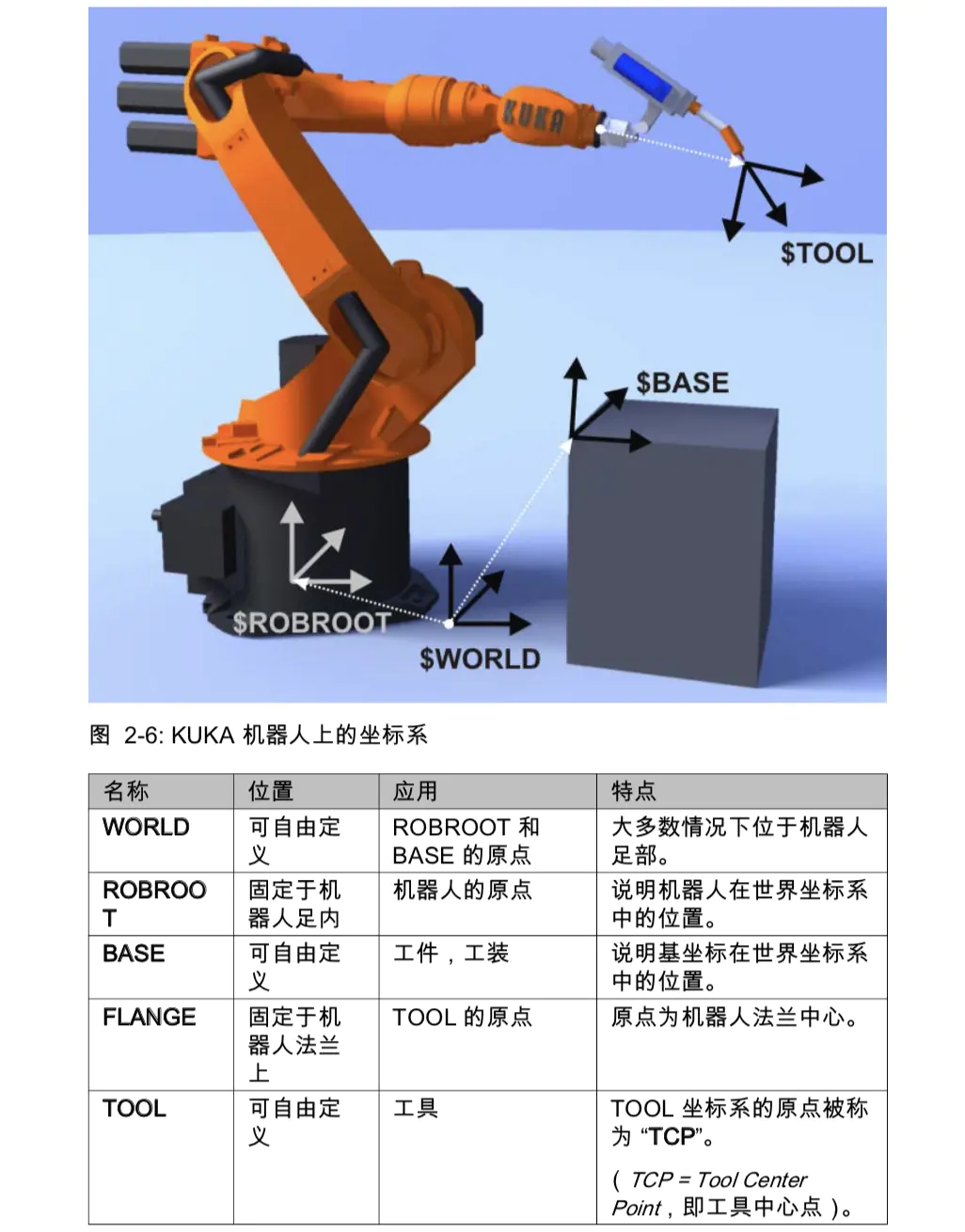
2.3 手动移 世界坐标系 的原则
机器人工具可以根据世界坐标系的坐标方向运动。 在此过程中,所有的机器人轴也会移动。
为此需要使用移动键或者 KUKA smartPAD 的 3D 鼠标。
在标准设置下,世界坐标系位于机器人底座 (Robroot) 中
速度可以更改(手动倍率:HOV)
仅在 T1 运行模式下才能手动移动。
确认键必须已经按下。
3D 鼠标
通过 3D 鼠标可以使机器人的运动变得直观明了,因此是在世界坐标系中 进行手动移动时的不二之选。
鼠标位置和自由度两者均可更改。
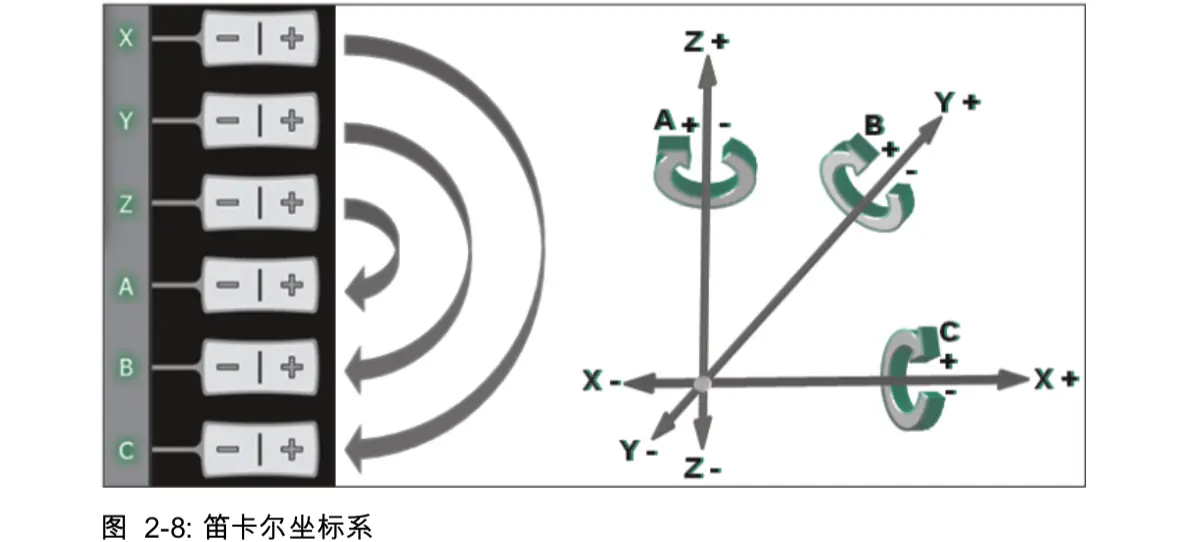
在坐标系中可以两种不同的方式移动机器人:
沿坐标系的坐标轴方向平移(直线):X、Y、Z
环绕着坐标系的坐标轴方向转动(旋转/回转):角度A、B和C
三、机器人的投入运行
3.1 零点标定
仅在工业机器人得到充分和正确标定零点时,它的使用效果才会最好。因为只 有这样,机器人才能达到它最高的点精度和轨迹精度或者完全能够以编程设定 的动作运动。零点标定时,会给每个机器人轴分派一个基准值。
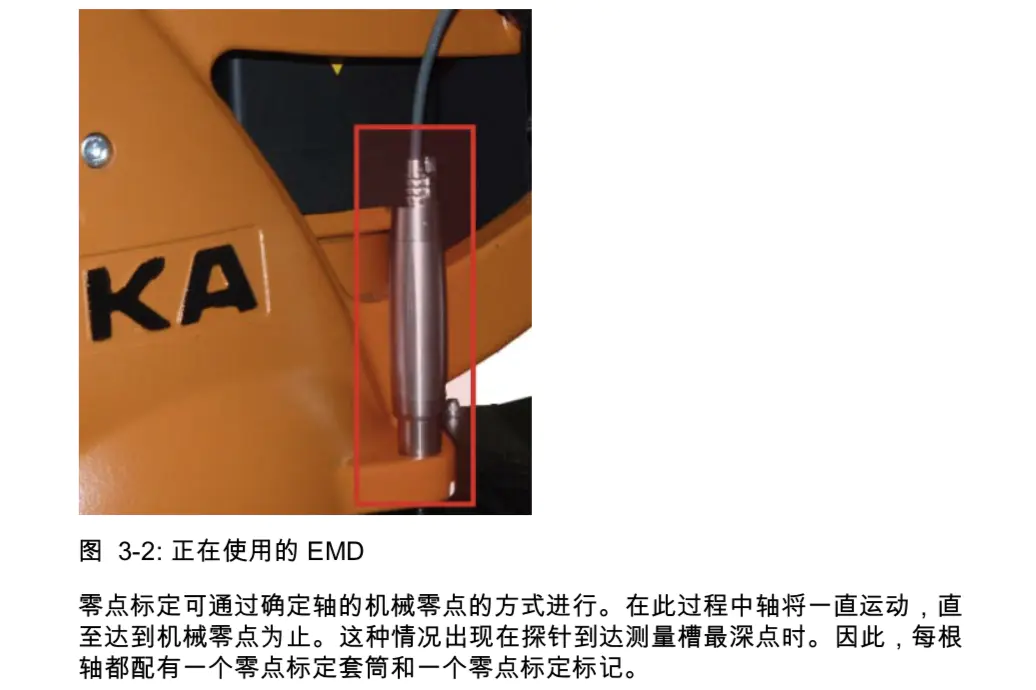
完整的零点标定过程包括为每一个轴标定零点。通过技术辅助工具 (EMD = Electronic Mastering Device (电子控制仪)) 可为任何一个在机械零点位置 的轴指定一个基准值 (例如:0°)。因为这样就可以使轴的机械位置和电气位 置保持一致,所以每一个轴都有一个唯一的角度值。
所有机器人的零点标定位置校准都,但不完全相同。精确位置在同一机器人型 号的不同机器人之间也会有所不同。
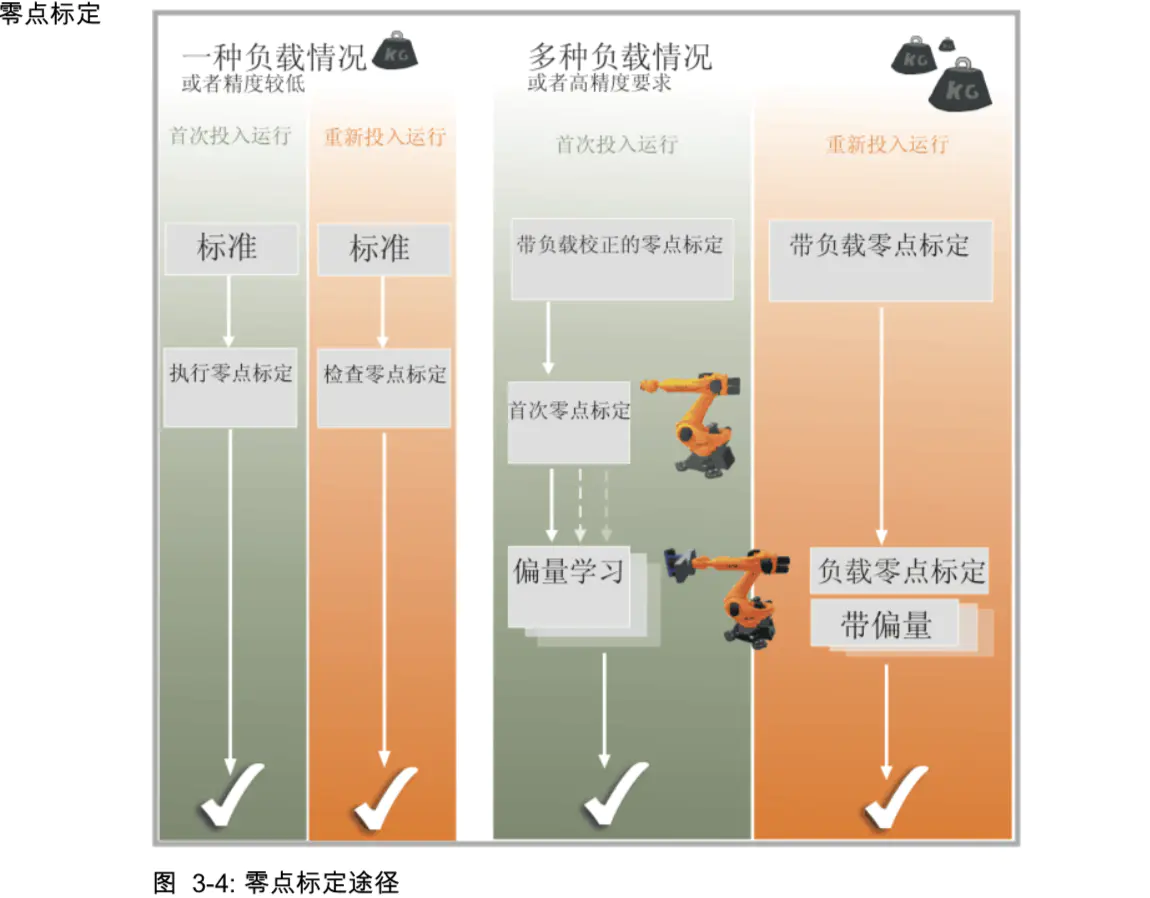
如果机器人以各种不同负载工作,则必须对每个负载都进行 “ 偏量学习 ”。对于抓取沉重部件的抓爪来说,则必须对抓爪分别在不带构件和带构件时进行 “ 偏量学习 ”
工具负载数据是指所有装在机器人法兰上的负载。它是另外装在机器人上并由 机器人一起移动的质量。
需要输入的值有质量、重心位置 (质量受重力作用的点)、质量转动惯量以及 所属的主惯性轴。
负载数据必须输入机器人控制系统,并分配给正确的工具。 例外:如果负载数据已经由 KUKA.LoadDataDetermination 传输到机器人控制
系统中,则无需再手工输入。
工具负载数据的可能来源如下:
KUKA.LoadDetect软件选项(仅用于负载) 生产厂商数据
人工计算
CAD程序
四、执行机器人程序
4.1 执行初始化运行
KUKA 机器人的初始化运行称为 BCO 运行。BCO 是 Blockcoincidence (即程序段重合)的缩写。重合意为 “ 一 致 ” 及 “ 时间 / 空间事件的会合 ”。
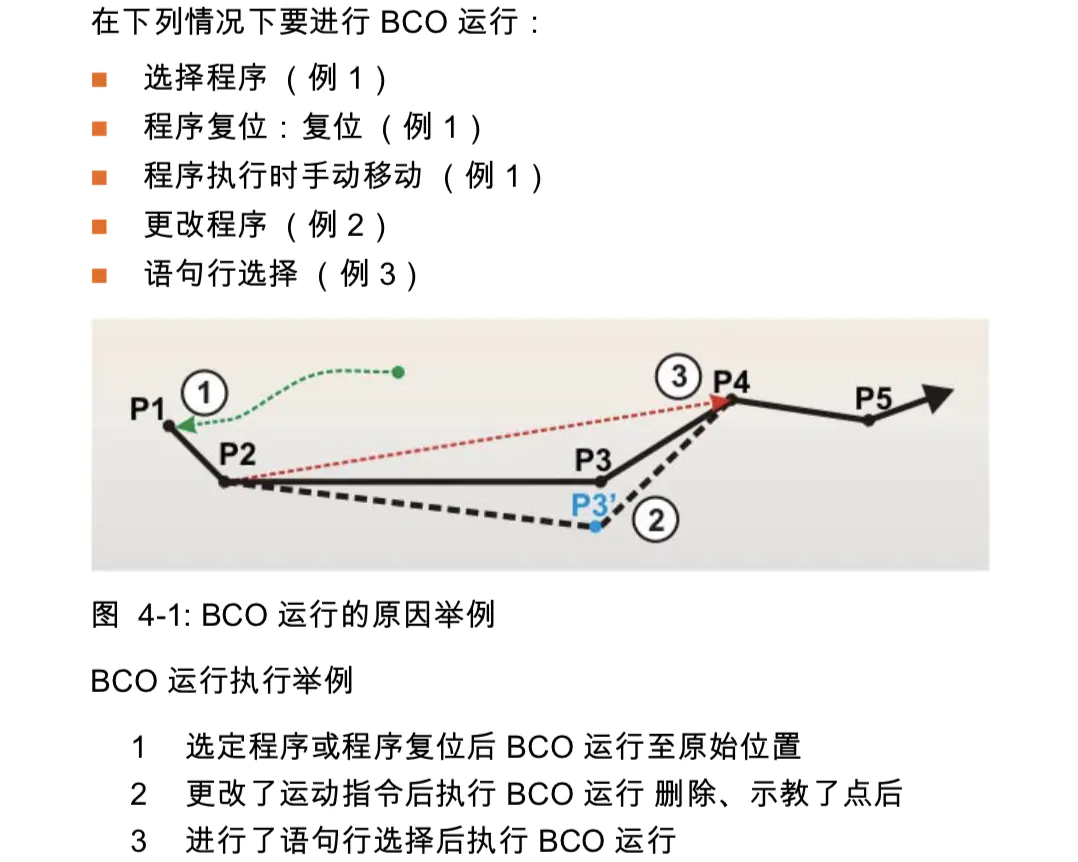
BOC运行的原因:为了使当前的机器人位置与机器人程序中的当前点位置保持一致,必须执行 BCO 运行。
仅当当前的机器人位置与编程设定的位置相同时才可进行轨迹规划。因此,首 先必须将 TCP 置于轨迹上。
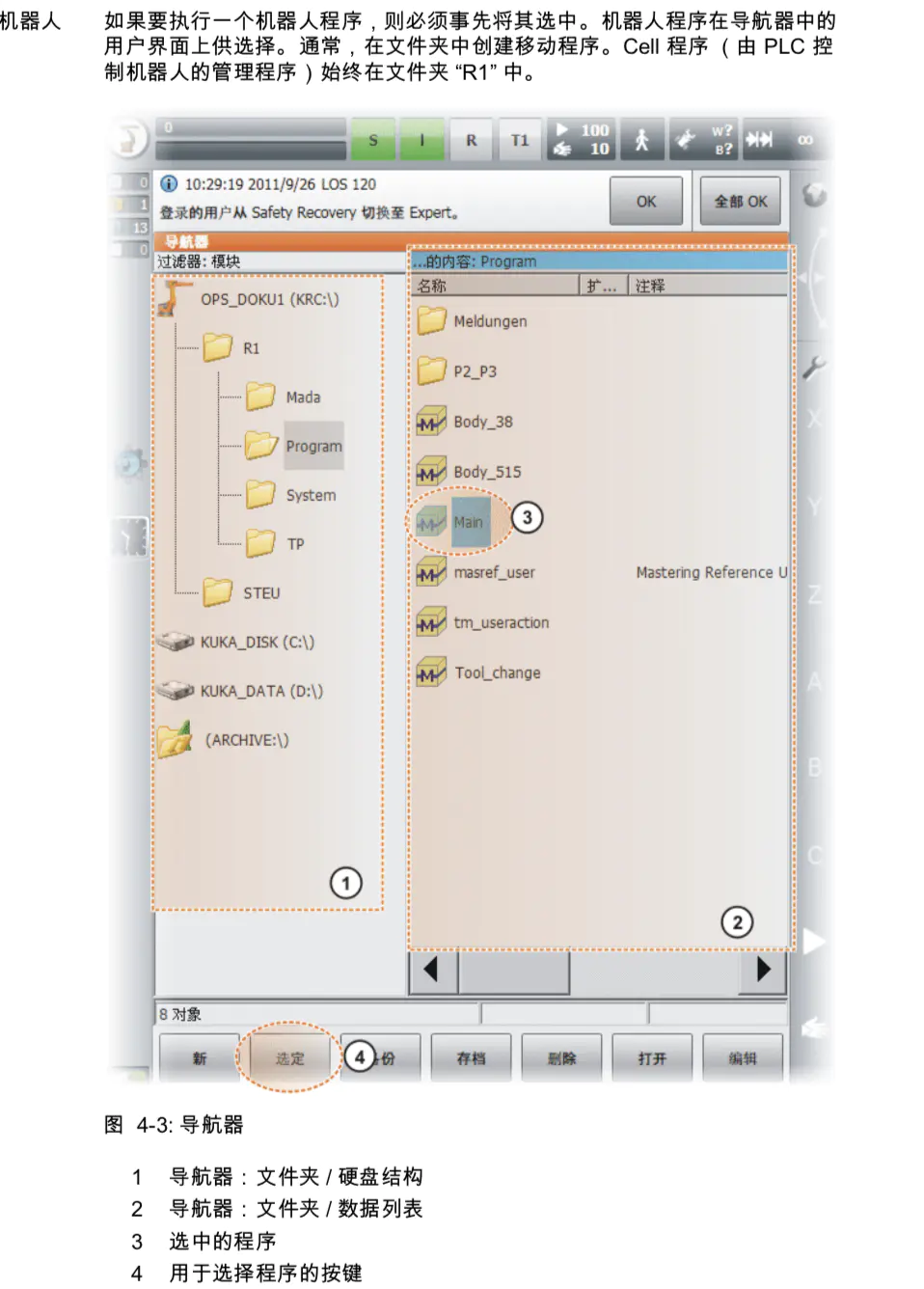
4.2 选择和启动机器人程序
五、程序文件的使用
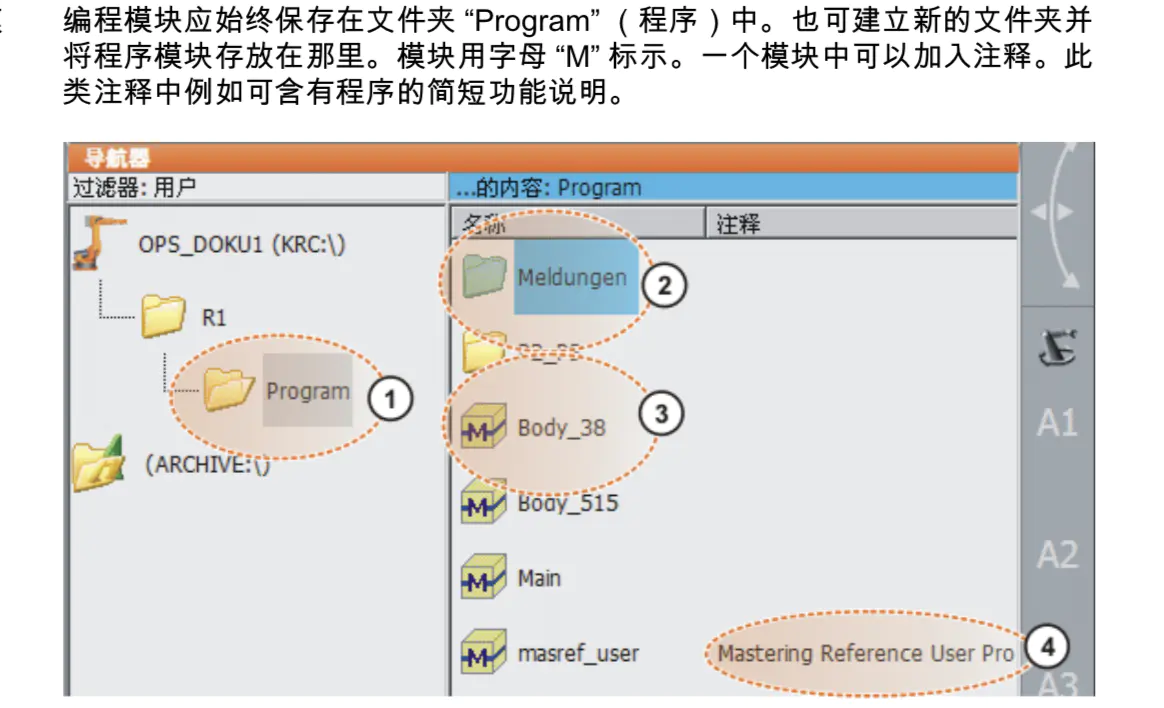
5.1 创建程序模块
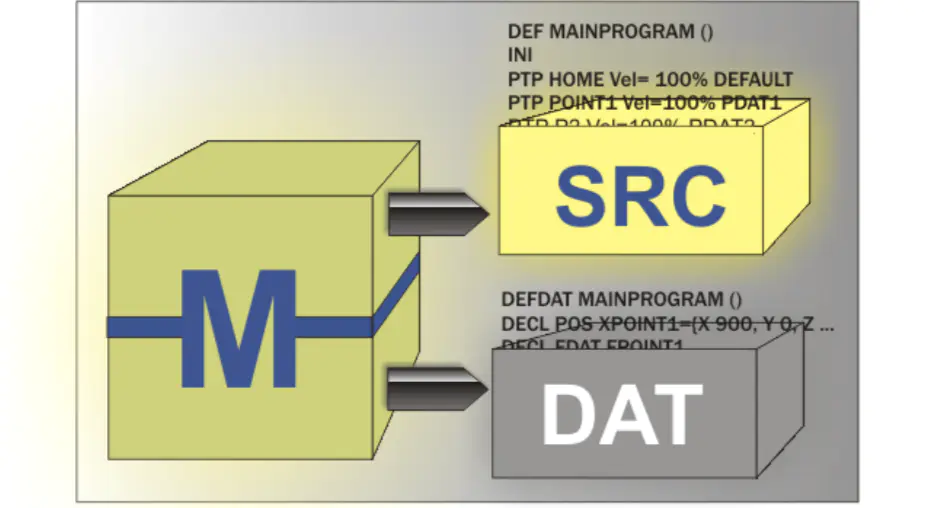
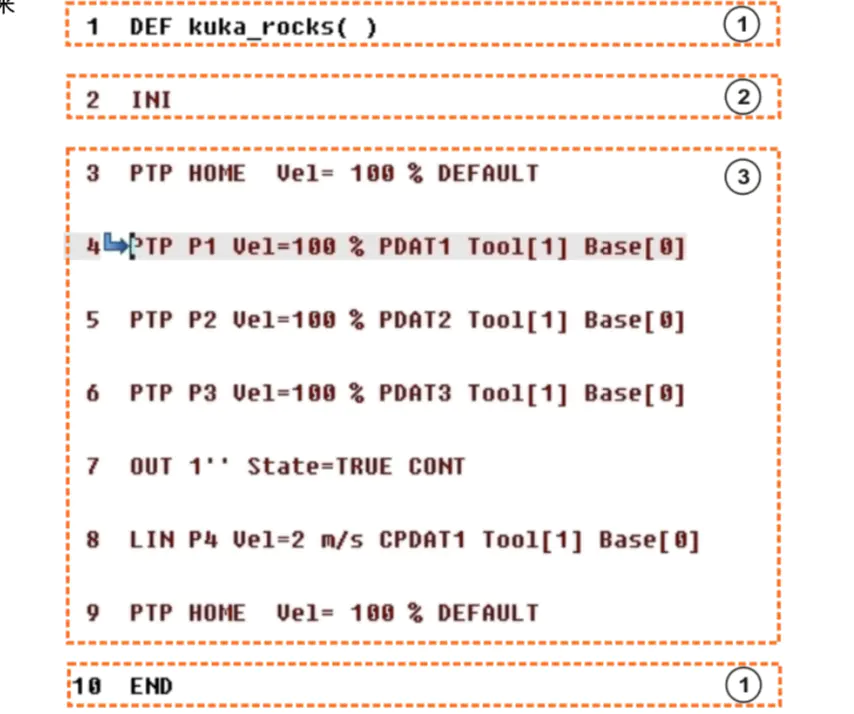
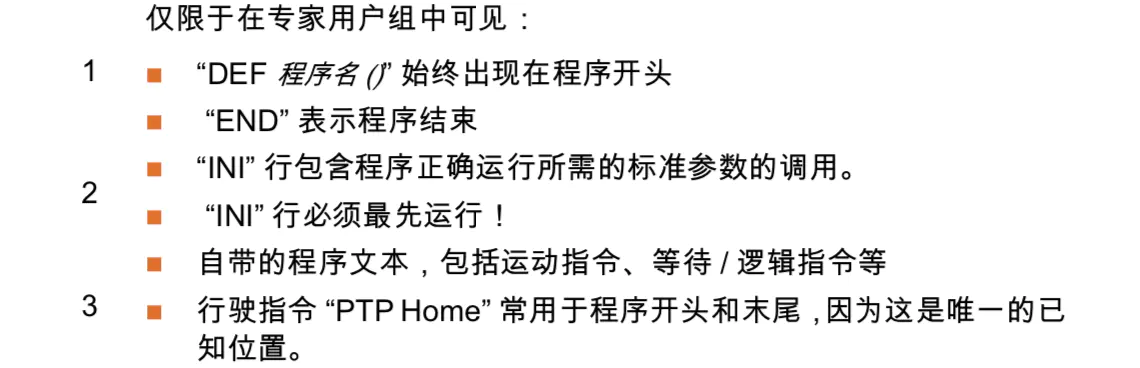
源代码:SRC 文件中含有程序源代码
数据列表:DAT 文件中含有固定数据和点坐标
六、建立及更改编程的运动

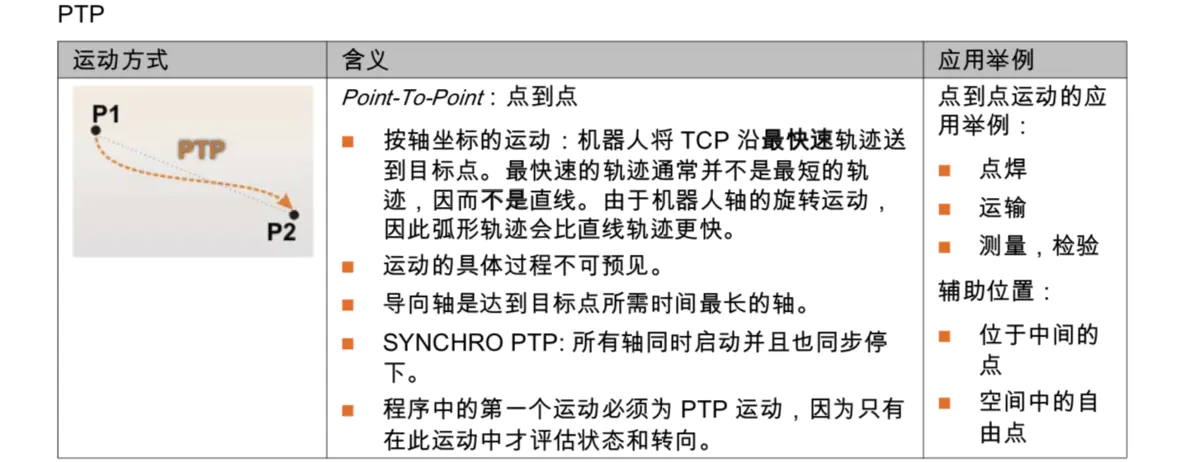
运动方式:
有不同的运动方式供运动指令的编程使用。可根据对机器人工作流程的要求来 进行运动编程。
- 按轴坐标的运动(PTP:Point-To-Point,即点到点)
- 沿轨迹的运动:LIN(线性)和CIRC(圆周形)
-
SPLINE:样条是一种尤其适用于复杂曲线轨迹的运动方式。这种轨迹原 则上也可以通过 LIN 运动和 CIRC 运动生成,但是样条更有优势。


















 1575
1575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









