






Abaqus 气动软体抓手机器人有限元仿真
Ⅰ. Freely beding
1. Set Work Directory
2. Import Part

3. Materials
- Paper
- General > Density:
Density = 750 Kg/m³ → 750e-12 (Mg/mm³) - Mechanical > Elasticity> Elastic:
Young’s Modulus = 6.5 GPa → 6500 (MPa)
Poisson’s ratio = 0.2

- gripper-silicone
- General > Density:
Density = 1050 Kg/m³ → 1050e-12 (Mg/mm³) - Mechanical > Hyperelastic > Uniaxial Test Data > Read from file > Yeoh model

Evaluate Material -> Coefficients


4. Section assignment
- Creat section
- Solid silicone

- Shell paper (图中 material 分配错误而报错,应为 paper)

- Silicone part section assign


5. Creat surfaces and sections
- Inner surface

- Edge section for contact setting

- Paper surface

6. Assemble and merge
- Creat instance

- Creat constraint (face to face)

- Merge

7. Create inextensible layer
- Creat skin

- Paper section assignment


8. Creat step and load
- Creat step-G and step-P


- Creat boundary condiiton and loads (G and P)



9. Add contact interaction ★
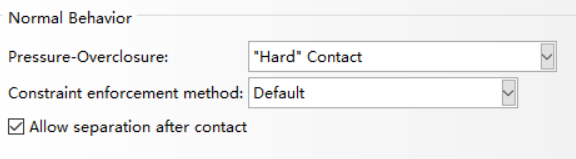
- Creat interaction properties

stiffness scale factor 可缩小来提高收敛性(但是结果好像区别不大)
-
Creat self-contact


-
Creat node(edge) to surface contact

-
Step-G contact


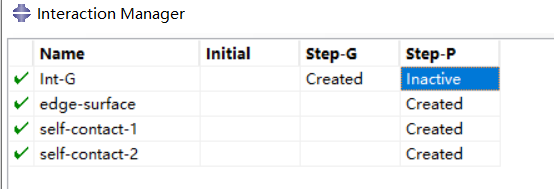
(实际计算时,step-G不收敛,压缩该步,重力影响可是加到Step-P上进行计算)
10. Mesh
- Mesh control

- Mesh seed (part and edge)


seed constraints 如图设置可提高收敛性。
-
Mesh part

-
Element type (part and paper layer)


11. output setting

12. Creat job and submit

13. Results
-
Creat XY data – ODB field output – U: Spatial displacement (U2 & U3) – Unique Nodal – Select the tip nodal – Plot
-
Report – XY – Select data – Save
参考:
https://softroboticstoolkit.com/book/pneunets-modeling


Normal behavior:https://www.bilibili.com/video/BV12P4y1W7td?p=2 25:10
node(edge) to surface : https://www.bilibili.com/video/BV12P4y1W7td?p=4 29:00、56:10
Ⅱ. Blocking force
1. Part
导入长方体模型(10* 40 *50)

2. Material
Steel
杨氏模量:200000
泊松比:0.3
3. Setction assignment
赋予结构材料特性,同时创建一个set,指向接触边线;

4. Assembly
加入Instance实例,并调整位置

5. Step and load
创建充气分析步,打开大变形计算,设置步长等;
设置施加载荷的大小;
同时设置固定边界条件:执行器末端和长方体底部。
6. contact
在Ⅰ的基础上,设置执行器和长方体的面面接触;


7. Mesh
对长方体进行网格划分


8. Output
Field output – CFORCE, Contact force
9. Job and submit
10. Results
- Creat XY data – ODB field output – CNORMF: CNF3 – Unique Nodal – Select the tip nodal – Plot
- 选择输出数据类型:

- 选择Unique Nodal 才能选择边线
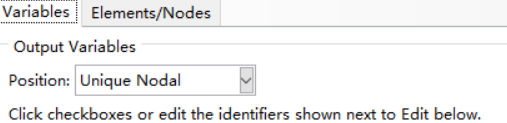
- 选择边线,然后Plot

或者

- Report – XY – Select data – Save
















 285
285











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









