






本课程基于Abaqus,应用两种加载方式一-FluidCavity与Pressure分别介绍了气动驱动软体机器人仿真分析流程。
该软体机器人涉及两种材料,主变形部分选用超弹性材料,应用Yeoh本构定义材料属性;限制层部分定义为线弹性材料。
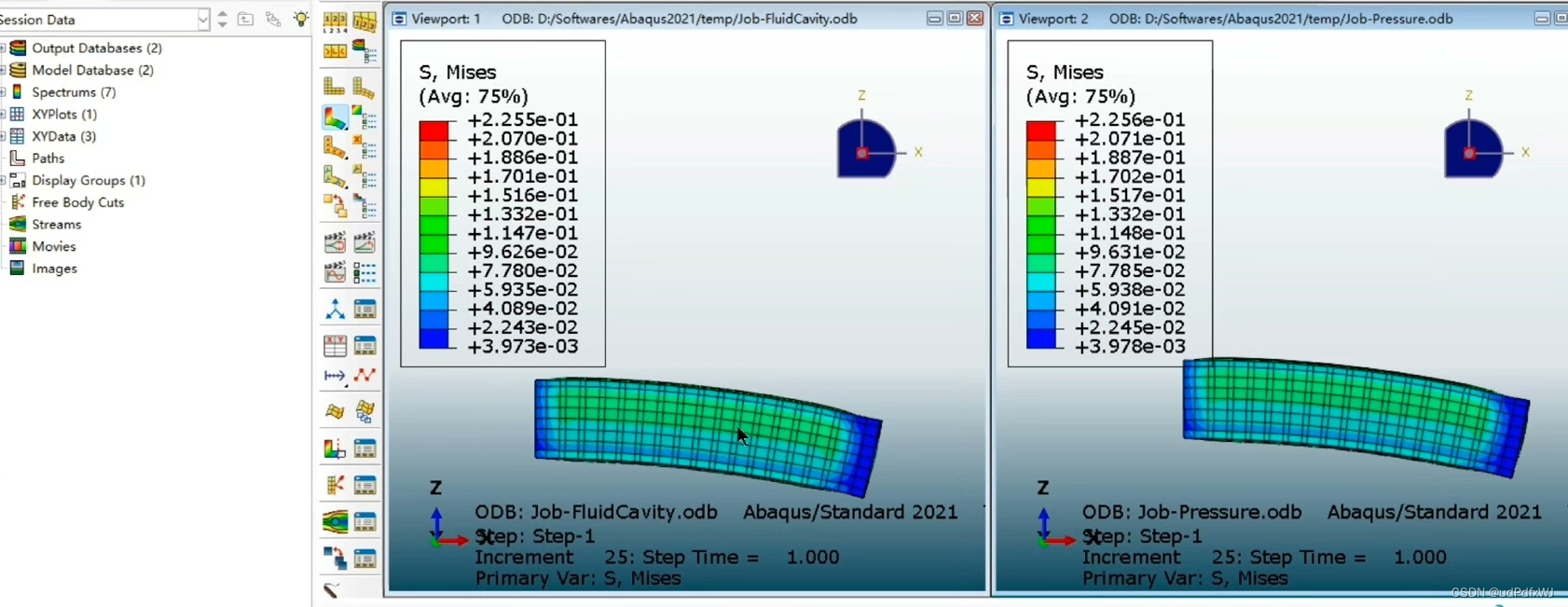
此外,对结果的后处理进行了简要介绍。
想学轮胎充气、气囊充气、各种充气分析都能用
软体机器人是一种模仿生物体软体结构和运动原理的智能机器人。它的主要特点是柔软、可变形,并且能够适应不同的环境和任务需求。软体机器人在工业生产、医疗领域、军事应用等方面都有着广泛的应用前景。
在软体机器人的设计和分析中,模拟软体机器人的运动和变形是一个关键问题。为了准确地模拟软体机器人的行为,我们需要借助仿真软件来进行分析和验证。Abaqus是一种常用的有限元分析软件,可以对复杂的结构进行建模和仿真。
本课程基于Abaqus,介绍了一种基于气动驱动的软体机器人仿真分析流程。使用两种加载方式,即FluidCavity和Pressure,来模拟软体机器人的变形和运动。通过对软体机器人的仿真分析,我们可以了解其在气囊充气、轮胎充气等各种充气分析方面的应用。
在软体机器人的仿真分析中,涉及到两种不同的材料:主变形部分和限制层。主变形部分选用超弹性材料,这种材料具有良好的变形性能和回弹性能,可以满足软体机器人不同姿态的变形需求。而限制层部分则定义为线弹性材料,用于限制软体机器人的运动范围,以保证其稳定性和可控性。
在仿真分析的过程中,我们采用Yeoh本构模型来定义超弹性材料的材料属性。Yeoh本构模型是一种常用的超弹性模型,它可以准确地描述超弹性材料的应力-应变关系。通过对材料属性的定义和应用,可以准确地模拟软体机器人的变形和行为。
除了加载方式和材料属性的定义,对仿真结果的后处理也是非常重要的一步。在本课程中,我们对结果的后处理进行了简要介绍。通过后处理,可以对仿真结果进行可视化和分析,进一步了解软体机器人的变形特点和运动行为。
综上所述,本课程基于Abaqus,应用FluidCavity和Pressure两种加载方式,介绍了气动驱动软体机器人仿真分析的流程。通过选用超弹性材料和线弹性材料,定义材料属性,可以准确地模拟软体机器人的变形和行为。对结果的后处理可以进一步分析软体机器人的特性。通过学习本课程,您可以掌握软体机器人仿真分析的基本方法和技巧,为轮胎充气、气囊充气等各种充气分析提供参考和指导。
相关代码,程序地址:http://imgcs.cn/lanzoun/744605122412.html















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









