






前言
-
Grad-CAM(Gradient-weighted Class Activation Mapping)是一种用于可视化深度学习模型(特别是卷积神经网络,CNNs)中模型“注意力”图的技术,可以帮助我们理解模型是如何做出决策的。 -
本文的重心不在论文解读与数学推导上,但也建议在读本文前对论文与算法实现有大概了解,下面是一些有关资料:
- 论文原文Grad-CAM: Visual Explanations from Deep Networks via Gradient-based Localization
- Bilibili同济子豪兄可解释人工智能公开课系列视频(论文精度部分讲的很棒!如果大家没有时间阅读论文,可以看UP主的
Grad-CAM论文精度视频) - 神经网络可视化包pytorch-grad-cam,该包中实现了
GradCAM、GradCAM++、ScoreCAM、LayerCAM,本文的算法代码详解也基于该库的优秀代码实现
-
Grad-CAM算法的优点(引用Bilibili同济子豪兄视频总结):- 无需
GAP层,无需修改模型结构、无需重新训练模型 - 可分析任意中间层
- 数学上是原生
CAM算法的推广 - 细粒度图像分类、机器学习解释
- 无需
-
Grad-CAM算法的缺点:- 图像上有多个同类物体时,只能画出一块热力图
- 不同位置的梯度值,
GAP平均之后,影响是相同的 - 梯度饱和、梯度消失、梯度噪声问题
- 权重大的
channel,不一定对类别预测分数贡献值大 - 只考虑从后往前的反向传播梯度,没考虑前向预测的影响
- 深层生成的粗粒度热力图和浅层生成的细粒度热力图都不够精准
-
GradCAM++算法针对Grad-CAM缺点的第1、2点进行了改进、ScoreCAM针对Grad-CAM缺点的第3、4、5点进行了改进、LayerCAM针对Grad-CAM缺点的第6点进行了改进。这些改进算法都十分有针对性,大家感兴趣也可以阅读阅读,本文的重点还是放到Grad-CAM算法上。
准备工作
- 因为本文的
Grad-CAM算法代码来源于pytorch-grad-cam包,所以大家需要先安装grad-cam包:
pip install grad-cam
- 安装完成后,创建一个新的项目文件夹和一个
python文件(demo.py),用于存放demo.py文件和方便后续debug,这里我创建的文件夹名称为grad,项目文件树为:
-grad
-demo.py
- 在
demo.py文件中填入下列代码:
import cv2
import numpy as np
import torch
from torchvision import models
import matplotlib.pyplot as plt
from pytorch_grad_cam import GradCAM
from pytorch_grad_cam import GuidedBackpropReLUModel
from pytorch_grad_cam.utils.image import (
show_cam_on_image, deprocess_image, preprocess_image
)
from pytorch_grad_cam.utils.model_targets import ClassifierOutputTarget
# 加载预训练模型
model = models.shufflenet_v2_x2_0(weights='DEFAULT').to(torch.device('cpu')).eval()
target_layers = [model.conv5]
# BGR --> RBG
rgb_img = cv2.imread('1.png', 1)[:, :, ::-1]
rgb_img = np.float32(rgb_img) / 255
input_tensor = preprocess_image(rgb_img,
mean=[0.529, 0.510, 0.466],
std=[0.306, 0.312, 0.278]).to('cpu')
# 在预训练数据集ImageNet-1K中第281类表示tabby cat
targets = [ClassifierOutputTarget(281)]
# Grad-Cam算法
cam = GradCAM(model=model, target_layers=target_layers)
grayscale_cam = cam(input_tensor=input_tensor, targets=targets)
# 取第1张图的cam
grayscale_cam = grayscale_cam[0, :]
# 将CAM作为掩码(mask)叠加到原图上
cam_image = show_cam_on_image(rgb_img, grayscale_cam, use_rgb=True)
# cam_image = cv2.cvtColor(cam_image, cv2.COLOR_RGB2BGR)
plt.imshow(cam_image)
plt.show()
# Guided算法
gb_model = GuidedBackpropReLUModel(model=model, device='cpu')
# 得到模型输出
gb = gb_model(input_tensor, target_category=281)
# 将3个单通道cam图片拼接,变成1个3通道的cam掩码(mask)
cam_mask = cv2.merge([grayscale_cam, grayscale_cam, grayscale_cam])
# 对图像进行标准化
cam_gb = deprocess_image(cam_mask * gb)
gb = deprocess_image(gb)
plt.imshow(cam_gb)
plt.show()
plt.imshow(gb)
plt.show()
- 然后运行
demo.py文件(1.png文件取至both.png),如果正常运行会出现三张图片:
- 这三张图分别表示什么,等后面我们解析完代码以后,大家就会很清楚了,先确保
demo.py文件正常运行。
代码解析
- 为了减少不必要的代码,这里选择了
pytorch提供的预训练模型,更多分类预训练模型可以查看官方文档。 - 我这里选择的是因为这个模型很轻,并且对CPU推理更加友好,当然大家可以根据自己的实际情况选择,步骤都是一样的。
- 我们加载完预训练模型后可以打印一下这个模型的架构,比如我选择的
shufflenet_v2_x2_0:
ShuffleNetV2(
(conv1): Sequential(...)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(stage2): Sequential(
(0): InvertedResidual(
(branch1): Sequential(...)
(branch2): Sequential(...)
)
...
)
(stage3): Sequential(
(0): InvertedResidual(
(branch1): Sequential(...)
(branch2): Sequential(...)
)
...
)
(stage4): Sequential(
(0): InvertedResidual(
(branch1): Sequential(...)
(branch2): Sequential(...)
)
...
)
(conv5): Sequential(
(0): Conv2d(976, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(fc): Linear(in_features=2048, out_features=1000, bias=True)
)
- 可以发现模型在线性分类层
fc的前面一层是conv5。虽然Grad-CAM算法可以应用到任意层,但一般认为线性分类层的前一层特征提取最抽象,也是线性分类头的特征来源,所以我们一般对模型线性分类头的前一特征层进行分析,这也就是为什么在demo.py文件中target_layers = [model.conv5]
# 加载预训练模型
model = models.shufflenet_v2_x2_0(weights='DEFAULT').to(torch.device('cpu')).eval()
target_layers = [model.conv5]
- 然后就是使用
cv2包读取了一张图片,并对图片进行了归一化操作,需要注意的是[:, :, ::-1]切片操作是将通道顺序BGR转换为RBG,因为cv2默认读取顺序是BGR。接着对图片进行了标准化,标准化中的均值(mean)和方差(std)是根据预训练模型在训练数据集中算出来的,比如shufflenet_v2_x2_0模型是在ImageNet-1K数据集上训练出来的,那么均值和方差就是根据ImageNet-1K数据集算出来的,在demo.py中大家默认使用这个均值和方差就可以。
# BGR --> RBG
rgb_img = cv2.imread('1.png', 1)[:, :, ::-1]
rgb_img = np.float32(rgb_img) / 255
input_tensor = preprocess_image(rgb_img,
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]).to('cpu')
- 接下来就涉及到了
pytorch_grad_cam库中的内容:
# 在预训练数据集ImageNet-1K中第281类表示tabby cat
targets = [ClassifierOutputTarget(281)]
# Grad-Cam算法
cam = GradCAM(model=model, target_layers=target_layers)
grayscale_cam = cam(input_tensor=input_tensor, targets=targets)
# 取第1张图的cam
grayscale_cam = grayscale_cam[0, :]
# 将CAM作为掩码(mask)叠加到原图上
cam_image = show_cam_on_image(rgb_img, grayscale_cam, use_rgb=True)
# cam_image = cv2.cvtColor(cam_image, cv2.COLOR_RGB2BGR)
plt.imshow(cam_image)
plt.show()
- 首先解释一下这个
ClassifierOutputTarget(),我们按住Ctrl,点击ClassifierOutputTarget,跳转到pytorch_grad_cam\utils\model_targets.py文件ClassifierOutputTarget类:
class ClassifierOutputTarget:
def __init__(self, category):
self.category = category
def __call__(self, model_output):
# 若模型输出单列
if len(model_output.shape) == 1:
return model_output[self.category]
# 若模型输出多列
return model_output[:, self.category]
- 可以看到,
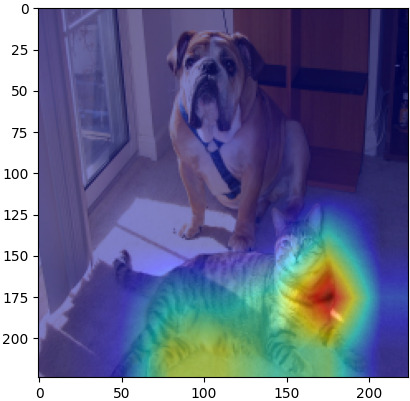
ClassifierOutputTarget类接受一个category参数,调用时输出模型对应类别的值。简单点说ClassifierOutputTarget()就是用来设定,当模型预测这张图片为某类别时,模型关注的是哪些地方。举个例子,在上面的1.png中,同时存在猫和狗,那么如果我设定ClassifierOutputTarget()为猫时,Grad-CAM算法就会分析模型预测这张图为猫时关注的是哪些地方。依次类推,当我设定为狗时,算法就会分析模型预测这张图为狗时关注的是哪些地方。 ImageNet-1K数据集有1000类,其中第281类(从0开始)表示tabby cat,这里我想要看模型预测这张图为猫时关注的是哪些地方(实际上模型认为这张图片是狗)。所以设定ClassifierOutputTarget(281),如果你的模型只有3类,[猫、狗、熊猫],那么你应该设置ClassifierOutputTarget(0),当然你也可以不设定,即targets= None,那么算法会自动寻找模型分类概率最大的类别作为分析目标(demo.py中会分析类别‘狗’),这个会在后面的代码解析中有体现,这里大家先有个大致了解。- 接下来终于来到了有关
Grad-CAM算法的部分,点击GradCAM进入pytorch_grad_cam\grad_cam.py文件中GradCAM类:
class GradCAM(BaseCAM):
def __init__(self, model, target_layers,
reshape_transform=None):
super(
GradCAM,
self).__init__(
model,
target_layers,
reshape_transform)
- 发现该类继承自
BaseCAM类,点击BaseCAM,跳转到pytorch_grad_cam\base_cam.py文件,BaseCAM类:
class BaseCAM:
def __init__(
self,
model: torch.nn.Module,
target_layers: List[torch.nn.Module],
reshape_transform: Callable = None,
compute_input_gradient: bool = False,
uses_gradients: bool = True,
tta_transforms: Optional[tta.Compose] = None,
) -> None:
self.model = model.eval()
self.target_layers = target_layers
self.device = next(self.model.parameters()).device
self.reshape_transform = reshape_transform
self.compute_input_gradient = compute_input_gradient
self.uses_gradients = uses_gradients
if tta_transforms is None:
self.tta_transforms = tta.Compose(
[
tta.HorizontalFlip(),
tta.Multiply(factors=[0.9, 1, 1.1]),
]
)
else:
self.tta_transforms = tta_transforms
# 注册hook函数(grad算法数据核心)
self.activations_and_grads = ActivationsAndGradients(self.model, target_layers, reshape_transform)
- 在该类中,大家需要重点关注的是
ActivationsAndGradients类,该类中实现了grad算法中的数据获取逻辑,点击ActivationsAndGradients,跳转到pytorch_grad_cam\activations_and_gradients.py文件中ActivationsAndGradients类:
class ActivationsAndGradients:
def __init__(self, model, target_layers, reshape_transform):
self.model = model
self.gradients = []
self.activations = []
self.reshape_transform = reshape_transform
self.handles = []
# 对目标层注册hook函数
for target_layer in target_layers:
self.handles.append(
# 在前向传播后,自动调用hook函数
target_layer.register_forward_hook(self.save_activation))
# Because of https://github.com/pytorch/pytorch/issues/61519,
# we don't use backward hook to record gradients.
self.handles.append(
target_layer.register_forward_hook(self.save_gradient))
def save_activation(self, module, input, output):
activation = output
if self.reshape_transform is not None:
activation = self.reshape_transform(activation)
# 保存目标层前向传播的结果
self.activations.append(activation.cpu().detach())
def save_gradient(self, module, input, output):
# 检查是否需要计算梯度
if not hasattr(output, "requires_grad") or not output.requires_grad:
# You can only register hooks on tensor requires grad.
return
# Gradients are computed in reverse order
def _store_grad(grad):
if self.reshape_transform is not None:
grad = self.reshape_transform(grad)
# 反向插入(先计算的梯度在后面),因为梯度是反向传播的,所以最新的梯度应该放在列表的前面。
self.gradients = [grad.cpu().detach()] + self.gradients
# 获得目标层反向传播的梯度
output.register_hook(_store_grad)
def __call__(self, x):
self.gradients = []
self.activations = []
return self.model(x)
def release(self):
for handle in self.handles:
handle.remove()
-
在
ActivationsAndGradients初始化方法中,传入了model参数,初始化了用于存储分析层梯度的gradients变量,用于存储分析层梯度的activations变量,用于存储注册特征图和梯度hook函数的handles变量。 -
这里有必要解释一下
pytorch中的4种hook函数 -
torch.Tensor.register_hook
- 功能:注册一个反向传播
hook函数,这个函数是Tensor类里的,当计算tensor的梯度时自动执行。 - 形式:
hook(grad) -> Tensor or None,其中grad就是这个tensor的梯度。
- 功能:注册一个反向传播
-
torch.nn.Module.register_forward_hook
- 功能:
Module前向传播中的hook,module在前向传播后,自动调用hook函数。 - 形式:
hook(module, input, output) -> None。注意不能修改input和output返回值 - 其中,
module是当前网络层,input是网络层的输入数据,output是网络层的输出数据 - 应用场景:如用于提取特征图
- 功能:
-
torch.nn.Module.register_forward_pre_hook
- 功能:执行
forward()之前调用hook函数。 - 形式:
hook(module, input) -> None or modified input
- 功能:执行
-
torch.nn.Module.register_full_backward_hook
- 功能:
Module反向传播中的hook,每次计算module的梯度后,自动调用hook函数。 - 形式:
hook(module, grad_input, grad_output) -> tuple(Tensor) or None - 注意事项:当
module有多个输入或输出时,grad_input和grad_output是一个tuple。 - 应用场景举例:例如提取特征图的梯度
- 功能:
-
更多有关
hook函数的资料,可以参考《PyTorch模型训练实用教程》(第二版) -
代码注释中说没有采用
backward hook是因为一个pytorch的小bug,这个bug是register_full_backward_hook与ReLU激活函数不兼容,所以采用register_forward_hook方式。 -
我们可以发现初始化方法对目标层分别添加了两个
hook函数,即save_activation和save_gradient,这两个函数就定义在ActivationsAndGradients类中,先看save_activation()函数:
def save_activation(self, module, input, output):
activation = output
if self.reshape_transform is not None:
activation = self.reshape_transform(activation)
# 保存目标层前向传播的结果
self.activations.append(activation.cpu().detach())
- 非常简单,就是将目标层的输出保存,那再看一下
save_gradient()函数:
def save_gradient(self, module, input, output):
# 检查是否需要计算梯度
if not hasattr(output, "requires_grad") or not output.requires_grad:
# You can only register hooks on tensor requires grad.
return
# Gradients are computed in reverse order
def _store_grad(grad):
if self.reshape_transform is not None:
grad = self.reshape_transform(grad)
# 反向插入(先计算的梯度在后面),因为梯度是反向传播的,所以最新的梯度应该放在列表的前面。
self.gradients = [grad.cpu().detach()] + self.gradients
# 获得目标层反向传播的梯度
output.register_hook(_store_grad)
-
save_gradient()函数先判断是否需要计算梯度,然后在函数内定义了一个_store_grad()函数,该函数记录tensor的梯度,因为梯度是反向传播的,所以新的梯度应该放在列表前面。然后该hook函数被注册在目标层中,使用register_forward_hook和register_hook成功避开了使用register_full_backward_hook。 -
后面的
__call__函数就是将数据输入模型,然后通过注册好的hook函数得到目标层的特征图activations和梯度值gradients。
def __call__(self, x):
self.gradients = []
self.activations = []
return self.model(x)
- 回到
demo.py函数,现在我们已经实例化了GradCAM类,接下来开始调用:
grayscale_cam = cam(input_tensor=input_tensor, targets=targets)
- 跳转到
pytorch_grad_cam\base_cam.py文件BaseCAM类中的__call__()方法:
def __call__(
self,
input_tensor: torch.Tensor,
targets: List[torch.nn.Module] = None,
aug_smooth: bool = False,
eigen_smooth: bool = False,
) -> np.ndarray:
# Smooth the CAM result with test time augmentation
if aug_smooth is True:
return self.forward_augmentation_smoothing(input_tensor, targets, eigen_smooth)
return self.forward(input_tensor, targets, eigen_smooth)
- 默认情况下
aug_smooth=False,不用管if分支,直接看return,点击forward,跳转到pytorch_grad_cam\base_cam.py文件BaseCAM类中的forward()方法:
def forward(
self, input_tensor: torch.Tensor, targets: List[torch.nn.Module], eigen_smooth: bool = False
) -> np.ndarray:
input_tensor = input_tensor.to(self.device)
if self.compute_input_gradient:
input_tensor = torch.autograd.Variable(input_tensor, requires_grad=True)
# 得到模型输出,通过hook函数得到特征图(注意!此时是没有得到梯度的,因为仅进行了前向传播)
self.outputs = outputs = self.activations_and_grads(input_tensor)
if targets is None:
target_categories = np.argmax(outputs.cpu().data.numpy(), axis=-1)
targets = [ClassifierOutputTarget(category) for category in target_categories]
if self.uses_gradients:
# 清空模型梯度
self.model.zero_grad()
# 取对应类别的输出结果
loss = sum([target(output) for target, output in zip(targets, outputs)])
# 反向传播,hook得到梯度,保存计算图(保存叶子结点结果)
loss.backward(retain_graph=True)
cam_per_layer = self.compute_cam_per_layer(input_tensor, targets, eigen_smooth)
return self.aggregate_multi_layers(cam_per_layer)
- 可以看到
forward()方法先调用了activations_and_grads(input_tensor),而activations_and_grads是实例化后的ActivationsAndGradients类,点击ActivationsAndGradients,跳转到pytorch_grad_cam\activations_and_gradients.py文件ActivationsAndGradients类中的__call__()方法:
def __call__(self, x):
self.gradients = []
self.activations = []
return self.model(x)
- 前面已经解释过
ActivationsAndGradients类中的__call__()方法了,这里不再赘述。回到pytorch_grad_cam\base_cam.py文件BaseCAM类中的forward()方法。在targets的if分支中可以看到,当targets为None时,会从模型的输出中找到数值最大的类别(对应输出下标),然后设定targets = ClassifierOutputTarget(category)。 - 接着往下,当需要梯度时,先对模型的梯度清零,取对应类别的输出结果,然后反向传播,并保存计算图。得到对应类别的梯度后,调用了
compute_cam_per_layer()方法,点击compute_cam_per_layer跳转到pytorch_grad_cam\base_cam.py文件BaseCAM类中的compute_cam_per_layer()方法:
def compute_cam_per_layer(
self, input_tensor: torch.Tensor, targets: List[torch.nn.Module], eigen_smooth: bool
) -> np.ndarray:
# 目标层的特征图
activations_list = [a.cpu().data.numpy() for a in self.activations_and_grads.activations]
# 目标层的梯度
grads_list = [g.cpu().data.numpy() for g in self.activations_and_grads.gradients]
# 输入张量的宽度和高度
target_size = self.get_target_width_height(input_tensor)
cam_per_target_layer = []
# Loop over the saliency image from every layer
for i in range(len(self.target_layers)):
target_layer = self.target_layers[i]
layer_activations = None
layer_grads = None
if i < len(activations_list):
layer_activations = activations_list[i]
if i < len(grads_list):
layer_grads = grads_list[i]
cam = self.get_cam_image(input_tensor, target_layer, targets, layer_activations, layer_grads, eigen_smooth)
# 将负值全部替换为0,相当于Relu函数
cam = np.maximum(cam, 0)
# 对类激活图进行缩放和归一化处理
scaled = scale_cam_image(cam, target_size)
# 在第1维和第2维之间插入一个新维度
cam_per_target_layer.append(scaled[:, None, :])
return cam_per_target_layer
- 可以看到
compute_cam_per_layer()方法先将目标层的特征图和梯度提取出来,然后获取输入张量的宽度和高度,for循环中,分别对每个目标层的特征图和梯度进行处理,因为在demo.py文件中,我们仅选择了1个目标层,所以这里的for循环只会执行一次。 for循环中调用了get_cam_image()方法,点击get_cam_image,跳转到pytorch_grad_cam\base_cam.py文件BaseCAM类中的get_cam_image()方法。
def get_cam_image(
self,
input_tensor: torch.Tensor,
target_layer: torch.nn.Module,
targets: List[torch.nn.Module],
activations: torch.Tensor,
grads: torch.Tensor,
eigen_smooth: bool = False,
) -> np.ndarray:
weights = self.get_cam_weights(input_tensor, target_layer, targets, activations, grads)
# 2D conv
if len(activations.shape) == 4:
weighted_activations = weights[:, :, None, None] * activations
# 3D conv
elif len(activations.shape) == 5:
weighted_activations = weights[:, :, None, None, None] * activations
else:
raise ValueError(f"Invalid activation shape. Get {len(activations.shape)}.")
if eigen_smooth:
cam = get_2d_projection(weighted_activations)
else:
# 将加权后的特征图按照通道数(轴)进行求和
# (batch_size, channel, hight, width) -> (batch, hight, width)
cam = weighted_activations.sum(axis=1)
return cam
get_cam_image()方法在一开始就调用了get_cam_weights()方法,点击get_cam_weights跳转到pytorch_grad_cam\grad_cam.py文件GradCAM类中的get_cam_weights()方法:
def get_cam_weights(self,
input_tensor,
target_layer,
target_category,
activations,
grads):
# 2D image
if len(grads.shape) == 4:
# 根据目标层梯度求每个channel的平均值
# grads:(batch_size, channel, hight, width) --> (batch_szie, channel)
return np.mean(grads, axis=(2, 3))
# 3D image
elif len(grads.shape) == 5:
return np.mean(grads, axis=(2, 3, 4))
else:
raise ValueError("Invalid grads shape."
"Shape of grads should be 4 (2D image) or 5 (3D image).")
- 可以看到
get_cam_weights()方法就是将输入的梯度按照channel维度进行平均,输入的梯度维度为:(batch_size, channel, hight, width),输出为:(batch_size, channel)。 - 回到
pytorch_grad_cam\base_cam.py文件BaseCAM类中的get_cam_image()方法。得到每个clannel的权重(weights)后,进入if分支,因为demo.py中是二维图片,所以应该进入len(activations.shape) == 4这个分支,注意weights[:, :, None, None]是在权重矩阵最后增加两个维度,即:(batch_size, channel)-->(batch_size, channel, 1, 1),这么做是为了与特征图(batch_size, channel, hight, width)相乘,得到的结果weighted_activations维度为:(batch_size, channel, hight, width)。 - 接着往下,因为在
demo.py中没有使用eigen_smooth,所以走else分支,对与梯度和特征图相乘后的weighted_activations沿channel轴进行求和,cam的维度为:(batch, hight, width),返回cam。 - 回到上层方法,
pytorch_grad_cam\base_cam.py文件BaseCAM类中的compute_cam_per_layer方法:
def compute_cam_per_layer(
self, input_tensor: torch.Tensor, targets: List[torch.nn.Module], eigen_smooth: bool
) -> np.ndarray:
...
cam = self.get_cam_image(input_tensor, target_layer, targets, layer_activations, layer_grads, eigen_smooth)
# 将负值全部替换为0,相当于Relu函数
cam = np.maximum(cam, 0)
# 对类激活图进行缩放和归一化处理
scaled = scale_cam_image(cam, target_size)
# 在第1维和第2维之间插入一个新维度
cam_per_target_layer.append(scaled[:, None, :])
return cam_per_target_layer
- 现在我们已经得到了
cam,接着将cam中的负值全部替换为0,相当于进入了Relu函数后的值,使用scale_cam_image()函数对cam进行缩放和归一化处理,点击scale_cam_image,看看内部实现:
def scale_cam_image(cam, target_size=None):
# 初始化一个空列表用于存放处理后的图像
result = []
# 在batch_size维度遍历输入的CAM图像列表
for img in cam:
# 将图像中的最小值减去,使图像的最小值变为0
img = img - np.min(img)
# 归一化图像,除以最大值(加1e-7是为了避免除以0)
img = img / (1e-7 + np.max(img))
# 如果提供了目标尺寸
if target_size is not None:
# 如果图像维度大于3
if len(img.shape) > 3:
# 使用scipy的zoom函数进行缩放
img = zoom(np.float32(img), [
(t_s / i_s) for i_s, t_s in zip(img.shape, target_size[::-1])])
else:
# 使用OpenCV的resize函数进行缩放
img = cv2.resize(np.float32(img), target_size)
# 将处理后的图像添加到结果列表中
result.append(img)
# 将结果列表转换为numpy数组,并确保数据类型为float32
result = np.float32(result)
# 返回处理后的CAM图像数组
return result
- 代码中的每一行我都进行了注释,这里就不再赘述了,简单点说,该函数就干了两件事,对
cam(类激活图)进行最大最小归一化,然后将其缩放至输入图片的大小。 - 因为随着网络越来越深,图片的
(hight, wight)越来越小,但clannel越来越大,将各通道根据梯度加权求和后,clannel维度消失,只剩下了(hight, wight),为了能与原图片像素点对应,需要对(hight, wight)缩放,比如在demo.py中,原始输入维度为(batch_size, clannel, hight, width) = (1, 3, 224, 224),加权求和前的activations(特征图)维度为(batch_size, clannel, hight, width) = (1, 2048, 7, 7),加权求和后的cam维度为(batch_size, hight, width) = (1, 7, 7)。所以要缩放到原始输入维度(1,224,224)。 - 回到上层方法,
pytorch_grad_cam\base_cam.py文件BaseCAM类中的compute_cam_per_layer方法:
def compute_cam_per_layer(
self, input_tensor: torch.Tensor, targets: List[torch.nn.Module], eigen_smooth: bool
) -> np.ndarray:
...
# 在第1维和第2维之间插入一个新维度
cam_per_target_layer.append(scaled[:, None, :])
return cam_per_target_layer
- 得到
scaled后追加到结果列表cam_per_target_layer,注意!在追加之前scaled[:, None, :]操作将scaled在第1维和第2维之间插入一个新维度,即(batch_size, hight, width)变为了(batch_size, 1, hight, width) - 回到上层函数
pytorch_grad_cam\base_cam.py文件BaseCAM类中的forward()方法:
def forward(
self, input_tensor: torch.Tensor, targets: List[torch.nn.Module], eigen_smooth: bool = False
) -> np.ndarray:
...
cam_per_layer = self.compute_cam_per_layer(input_tensor, targets, eigen_smooth)
return self.aggregate_multi_layers(cam_per_layer)
- 现在已经得到了
cam_per_layer,接下来调用了aggregate_multi_layers()方法,点击aggregate_multi_layers,跳转到pytorch_grad_cam\base_cam.py
def aggregate_multi_layers(self, cam_per_target_layer: np.ndarray) -> np.ndarray:
cam_per_target_layer = np.concatenate(cam_per_target_layer, axis=1)
# 将负值全部变为0
cam_per_target_layer = np.maximum(cam_per_target_layer, 0)
# 沿clannel平均:(batch_size, clannel, hight, width) --> (batch_size, hight, width)
result = np.mean(cam_per_target_layer, axis=1)
# 对图片进行归一化
return scale_cam_image(result)
- 该函数先对传入的
cam类激活图做了拼接操作,然后将负值变为0,沿clannel轴进行平均(这里只对多目标层其作用,实际上对demo.py中的单图片,单目标层是不起作用的),最后对图片进行归一化,返回。 scale_cam_image()函数,前面已经讲过了,这里不再赘述:
def scale_cam_image(cam, target_size=None):
# 初始化一个空列表用于存放处理后的图像
result = []
# 在batch_size维度遍历输入的CAM图像列表
for img in cam:
# 将图像中的最小值减去,使图像的最小值变为0
img = img - np.min(img)
# 归一化图像,除以最大值(加1e-7是为了避免除以0)
img = img / (1e-7 + np.max(img))
# 如果提供了目标尺寸
if target_size is not None:
# 如果图像维度大于3
if len(img.shape) > 3:
# 使用scipy的zoom函数进行缩放
img = zoom(np.float32(img), [
(t_s / i_s) for i_s, t_s in zip(img.shape, target_size[::-1])])
else:
# 使用OpenCV的resize函数进行缩放
img = cv2.resize(np.float32(img), target_size)
# 将处理后的图像添加到结果列表中
result.append(img)
# 将结果列表转换为numpy数组,并确保数据类型为float32
result = np.float32(result)
# 返回处理后的CAM图像数组
return result
- 回到上层函数
pytorch_grad_cam\base_cam.py文件BaseCAM类中的forward()方法:
def forward(
self, input_tensor: torch.Tensor, targets: List[torch.nn.Module], eigen_smooth: bool = False
) -> np.ndarray:
...
return self.aggregate_multi_layers(cam_per_layer)
- 回到上层函数
pytorch_grad_cam\base_cam.py文件BaseCAM类中的__call__()方法:
def __call__(
self,
input_tensor: torch.Tensor,
targets: List[torch.nn.Module] = None,
aug_smooth: bool = False,
eigen_smooth: bool = False,
) -> np.ndarray:
...
return self.forward(input_tensor, targets, eigen_smooth)
- 回到
demo.py文件
grayscale_cam = cam(input_tensor=input_tensor, targets=targets)
# 取第1张图的cam
grayscale_cam = grayscale_cam[0, :]
# 将CAM作为掩码(mask)叠加到原图上
cam_image = show_cam_on_image(rgb_img, grayscale_cam, use_rgb=True)
# cam_image = cv2.cvtColor(cam_image, cv2.COLOR_RGB2BGR)
plt.imshow(cam_image)
plt.show()
- 现在我们得到了类激活图
grayscalse_cam,取出一张类激活图,使用show_cam_on_image()函数叠加到原图上。点击show_cam_on_image跳转到pytorch_grad_cam\utils\image.py
def show_cam_on_image(img: np.ndarray,
mask: np.ndarray,
use_rgb: bool = False,
colormap: int = cv2.COLORMAP_JET,
image_weight: float = 0.5) -> np.ndarray:
# 将 CAM 掩码转换为热力图
heatmap = cv2.applyColorMap(np.uint8(255 * mask), colormap)
# 如果使用 RGB 格式,则将 BGR 热力图转换为 RGB
if use_rgb:
heatmap = cv2.cvtColor(heatmap, cv2.COLOR_BGR2RGB)
# 将热力图转换为浮点数,并将其范围缩放到 [0, 1]
heatmap = np.float32(heatmap) / 255
# 检查输入图像是否为浮点数,并且其值范围在[0, 1]之间
if np.max(img) > 1:
raise Exception(
"The input image should np.float32 in the range [0, 1]")
# 检查 image_weight 是否在[0, 1]之间
if image_weight < 0 or image_weight > 1:
raise Exception(
f"image_weight should be in the range [0, 1].\
Got: {image_weight}")
# 将图像和热力图结合,根据image_weight进行加权混合
cam = (1 - image_weight) * heatmap + image_weight * img
# 对最终结果进行归一化,使其范围再次回到 [0, 1]
cam = cam / np.max(cam)
# 将结果转换回 uint8 类型,以便显示
return np.uint8(255 * cam)
- 该函数的每一行代码都进行了注释,这里就不多赘述了,大家可以看注释。回到
demo.py文件,将在原图上叠加好后的类激活图用plt进行可视化就得到了下图:

- 如果将
targets设为None(targets = None),就得到了下面这张图,当模型认为类别为狗时关注的区域。

- 因为
Grad-CAM算法是根据目标层的特征图和梯度来计算关注区域的,若目标层较深需要缩放到原图大小,这样可能就不够细致。所以出现了Guided Backpropagation算法。 Guided Backpropagation是一种修改后的反向传播算法,它通过只传递正梯度来增强反向传播过程。这种方法可以产生更加清晰、更易于解释的输入图像敏感性图。在反向传播过程中,Guided Backpropagation只允许正梯度通过ReLU单元,这有助于突出显示对输出有积极贡献的图像区域。- 一般先使用
Grad-CAM生成热图,然后利用Guided Backpropagation生成精细的敏感性图。最后,将这两个结果结合起来,可以得到更加详细和精确的可视化结果。 - 继续看
demo.py后面的代码:
# Guided算法
gb_model = GuidedBackpropReLUModel(model=model, device='cpu')
# 得到对应类别梯度
gb = gb_model(input_tensor, target_category=281)
# 将3个单通道cam图片拼接,变成1个3通道的cam掩码(mask)
cam_mask = cv2.merge([grayscale_cam, grayscale_cam, grayscale_cam])
# 对图像进行标准化
cam_gb = deprocess_image(cam_mask * gb)
gb = deprocess_image(gb)
plt.imshow(cam_gb)
plt.show()
plt.imshow(gb)
plt.show()
- 点击
GuidedBackpropReLUModel,跳转到pytorch_grad_cam\guided_backprop.py文件GuidedBackpropReLUModel类:
class GuidedBackpropReLUModel:
def __init__(self, model, device):
self.model = model
self.model.eval()
self.device = next(self.model.parameters()).device
- 可以看到,该类的初始化方法接受了一个模型,然后将模型置为验证(
eval())模式,并将模型参数转移到对应设备(device)上。回到demo.py文件,接下来调用了GuidedBackpropReLUModel类的__call__()方法:
def __call__(self, input_img, target_category=None):
# 将nn.ReLU层全部变为GuidedBackpropReLUasModule()层
replace_all_layer_type_recursive(self.model,
torch.nn.ReLU,
GuidedBackpropReLUasModule())
input_img = input_img.to(self.device)
# 对输入计算梯度
input_img = input_img.requires_grad_(True)
# 前向传播
output = self.forward(input_img)
if target_category is None:
target_category = np.argmax(output.cpu().data.numpy())
# 得到对应类别输出
loss = output[0, target_category]
# 反向传播并保存计算图
loss.backward(retain_graph=True)
output = input_img.grad.cpu().data.numpy()
# (batch_size, clannel, hight, width) --> (clannel, hight, width)
output = output[0, :, :, :]
# (clannel, hight, width) --> (hight, width, clannel)
output = output.transpose((1, 2, 0))
# 将模型还原,即将GuidedBackpropReLUasModule()层全部变为nn.ReLU()层
replace_all_layer_type_recursive(self.model,
GuidedBackpropReLUasModule,
torch.nn.ReLU())
return output
- 可以看到
__call__()方法,先调用了replace_all_layer_type_recursive()函数,点击replace_all_layer_type_recursive,跳转到pytorch_grad_cam\utils\find_layers.py文件replace_all_layer_type_recursive()函数:
def replace_all_layer_type_recursive(model, old_layer_type, new_layer):
for name, layer in model._modules.items():
if isinstance(layer, old_layer_type):
model._modules[name] = new_layer
replace_all_layer_type_recursive(layer, old_layer_type, new_layer)
- 该函数的作用是不断递归模型的各个层,将
old_layer替换为new_layer,回到pytorch_grad_cam\guided_backprop.py文件GuidedBackpropReLUModel类中的__call__()方法,发现old_layer就是torch.nn.Relu()激活层,new_layer是自定义的GuidedBackpropReLUasModule(),点击GuidedBackpropReLUasModule,跳转到pytorch_grad_cam\guided_backprop.py文件GuidedBackpropReLUasModule类:
class GuidedBackpropReLUasModule(torch.nn.Module):
def __init__(self):
super(GuidedBackpropReLUasModule, self).__init__()
def forward(self, input_img):
return GuidedBackpropReLU.apply(input_img)
- 直接看
forward()方法,里面调用了GuidedBackpropReLU,点击GuidedBackpropReLU,跳转到pytorch_grad_cam\guided_backprop.py文件GuidedBackpropReLU类
class GuidedBackpropReLU(Function):
@staticmethod
def forward(self, input_img):
# 创建一个与输入相同类型的mask,标记出输入中的正数元素
positive_mask = (input_img > 0).type_as(input_img)
# 使用addcmul操作来将正数元素保留,其余元素设为0
# addcmul是一个逐元素乘法操作
# torch.zeros初始化一个与input_img同尺寸的张量,然后使用addcmul与positive_mask逐元素相乘
output = torch.addcmul(
torch.zeros(
input_img.size()).type_as(input_img),
input_img,
positive_mask)
# 保存输入和输出张量,以便在反向传播时使用
self.save_for_backward(input_img, output)
# 返回经过 ReLU 激活后的输出
return output
@staticmethod
def backward(self, grad_output):
# 获取前向传播时保存的输入和输出张量
input_img, output = self.saved_tensors
# 反向传播的梯度默认为None
grad_input = None
# 创建一个与输入相同类型的mask,标记出输入中的正数元素
positive_mask_1 = (input_img > 0).type_as(grad_output)
# 创建一个与grad_output相同类型的mask,标记出grad_output中的正数元素
positive_mask_2 = (grad_output > 0).type_as(grad_output)
# 使用addcmul操作来保留输入和grad_output中同时为正数的元素的梯度
# 第一步是将grad_output与input_img中的正数部分相乘
# 第二步是将第一步的结果与grad_output中的正数部分相乘
# 结果是只有当输入和grad_output都为正数时,梯度才被保留下来
grad_input = torch.addcmul(
torch.zeros(
input_img.size()).type_as(input_img),
torch.addcmul(
torch.zeros(
input_img.size()).type_as(input_img),
grad_output,
positive_mask_1),
positive_mask_2)
# 返回计算得到的输入梯度
return grad_input
- 该类的代码我都进行了注释,大家对照着看就可以,这里主要说一下
GuidedBackpropReLU类和nn.Relu()的区别。两者在前向传播forward过程中都是一样的,仅允许正数通过。但反向传播backward过程就不一样了,nn.Relu将正数梯度赋为 1,负数则梯度为 0。GuidedBackpropReLU类将输入为正数并且梯度也是正数的梯度进行传递;其他情况下(输入是正数但梯度是负数),梯度被截断为 0。 - 从
GuidedBackpropReLU类backward()方法可以很明显的看出来。回到上层方法pytorch_grad_cam\guided_backprop.py文件GuidedBackpropReLUModel类中的__call__方法,先调用replace_all_layer_type_recursive()函数将模型中的nn.ReLU层全部变为GuidedBackpropReLUasModule()层,然后将输入移动到与模型相同的设备上,并打开梯度计算,调用forward()方法,点击forward,跳转到pytorch_grad_cam\guided_backprop.py文件GuidedBackpropReLUModel类中的forward()方法:
def forward(self, input_img):
return self.model(input_img)
forward()方法很简单,就是将张量输入模型,得到输出,进行一次前向传播。回到上层方法pytorch_grad_cam\guided_backprop.py文件GuidedBackpropReLUModel类中的__call__方法。
def __call__(self, input_img, target_category=None):
...
# 前向传播
output = self.forward(input_img)
if target_category is None:
target_category = np.argmax(output.cpu().data.numpy())
# 得到对应类别输出
loss = output[0, target_category]
# 反向传播并保存计算图
loss.backward(retain_graph=True)
output = input_img.grad.cpu().data.numpy()
# (batch_size, clannel, hight, width) --> (clannel, hight, width)
output = output[0, :, :, :]
# (clannel, hight, width) --> (hight, width, clannel)
output = output.transpose((1, 2, 0))
# 将模型还原,即将GuidedBackpropReLUasModule()层全部变为nn.ReLU()层
replace_all_layer_type_recursive(self.model,
GuidedBackpropReLUasModule,
torch.nn.ReLU())
return output
- 得到模型输出后,判断是否传入了目标类别,如果没有传入则使用概率最大的类别,接着取出目标类的输出,进行反向传播并保存计算图,得到输入张量的梯度,去掉
batch_size维度,对输出进行转置,最后将模型还原,GuidedBackpropReLUasModule()层全部变为nn.ReLU()层,返回经过变换的输入张量梯度output。 - 回到
demo.py
gb_model = GuidedBackpropReLUModel(model=model, device='cpu')
# 得到对应类别梯度
gb = gb_model(input_tensor, target_category=281)
# 将3个单通道cam图片拼接,变成1个3通道的cam掩码(mask)
cam_mask = cv2.merge([grayscale_cam, grayscale_cam, grayscale_cam])
# 对图像进行标准化
cam_gb = deprocess_image(cam_mask * gb)
gb = deprocess_image(gb)
- 现在我们已经得到了输入张量(图片)的梯度
gb了,将3个单通道cam图片拼接,变成1个3通道的cam掩码(mask),然后分别对gb和叠加了cam_mask的gb图像进行标准化。点击deprocess_image,跳转到pytorch_grad_cam\utils\image.py文件,deprocess_image()函数:
def deprocess_image(img):
""" see https://github.com/jacobgil/keras-grad-cam/blob/master/grad-cam.py#L65 """
# 将图像减去均值
img = img - np.mean(img)
# 除以方差
img = img / (np.std(img) + 1e-5)
img = img * 0.1
img = img + 0.5
# 0-1归一化
img = np.clip(img, 0, 1)
return np.uint8(img * 255)
-
deprocess_image()函数先对图像减去均值,除以方差,然后最大最小归一化,再乘以255恢复原始图像量纲。 -
回到
demo.py,标准化和归一化完成后就是可视化gb和cam_gb了
plt.imshow(cam_gb)
plt.show()
plt.imshow(gb)
plt.show()
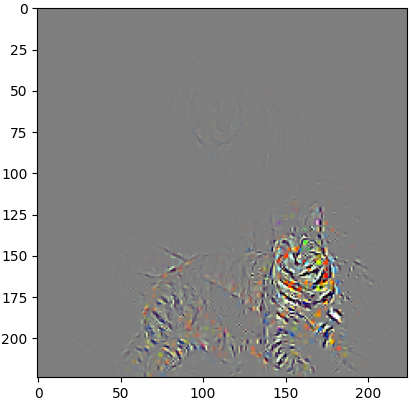
cam_gb是cam和gb的叠加,遮掩了无关类别的权重,如第281类,猫

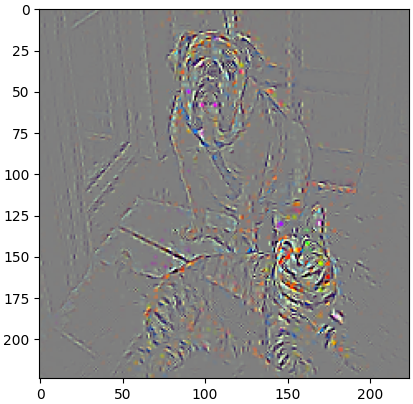
- 而
gb则是所有对类别判别有帮助的像素点,如

pytorch从零实现
-
当我们了解
Grad-CAM算法原理后,实际上也可以自己手动去实现(下列代码部分参考《PyTorch模型训练实用教程》(第二版)) -
这里我还是选用的
ShuffNet模型,环境是kaggle jupyter notebook,GPU是P100,数据集是蚂蚁蜜蜂分类数据集,模型训练代码参考Transfer Learning for Computer Vision Tutorial(计算机视觉迁移学习教程) -
准备数据集
# 下载蜜蜂蚂蚁分类数据集
!wget -q https://download.pytorch.org/tutorial/hymenoptera_data.zip
!unzip -q /kaggle/working/hymenoptera_data.zip
!rm -rf /kaggle/working/hymenoptera_data.zip
- 导入必要包
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim import lr_scheduler
import torch.backends.cudnn as cudnn
import numpy as np
import torchvision
from torchvision import datasets, models, transforms
import matplotlib.pyplot as plt
import time
import os
from PIL import Image
import cv2
- 图像预处理与增强,加载数据集
# 图像预处理与增强
data_transforms = {
'train': transforms.Compose([
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
'val': transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
}
data_dir = '/kaggle/working/hymenoptera_data'
# 读取数据集并添加预处理步骤
image_datasets = {x: datasets.ImageFolder(os.path.join(data_dir, x),
data_transforms[x])
for x in ['train', 'val']}
# 加载数据集
dataloaders = {x: torch.utils.data.DataLoader(image_datasets[x], batch_size=16,
shuffle=True, num_workers=4)
for x in ['train', 'val']}
# 训练集与验证集大小
dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'val']}
# 类别名
class_names = image_datasets['train'].classes
# 训练设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
- 部分图像可视化
def imshow(inputs, title=None):
idx = 0
for inp, t in zip(inputs,title):
idx = idx+1
if idx > 6:
break
inp = inp.numpy().transpose((1, 2, 0))
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
inp = std * inp + mean
inp = np.clip(inp, 0, 1)
plt.subplot(2,3,idx)
plt.imshow(inp)
plt.axis('off')
plt.title(t)
plt.show()
# 取1个batch的训练数据
inputs, classes = next(iter(dataloaders['train']))
imshow(inputs, title=[class_names[x] for x in classes])

- 定义模型训练函数
def train_model(model, criterion, optimizer, scheduler, num_epochs=25):
# 最佳模型权重保存路径
best_model_params_path = 'best_model_params.pt'
# 最佳准确率
best_acc = 0.0
for epoch in range(num_epochs):
print(f'Epoch {epoch}/{num_epochs - 1}')
print('-' * 10)
# 训练模式与验证模式
for phase in ['train', 'val']:
if phase == 'train':
model.train()
else:
model.eval()
running_loss = 0.0
running_corrects = 0
# 迭代数据集
for inputs, labels in dataloaders[phase]:
# 将数据移动到训练设备
inputs = inputs.to(device)
labels = labels.to(device)
# 梯度清零
optimizer.zero_grad()
# 反向传播
# track history if only in train
with torch.set_grad_enabled(phase == 'train'):
# 得到模型输出
outputs = model(inputs)
# preds为预测类别
_, preds = torch.max(outputs, 1)
# 计算loss
loss = criterion(outputs, labels)
if phase == 'train':
# loss反向传播
loss.backward()
# 更新参数
optimizer.step()
# 统计loss
running_loss += loss.item() * inputs.size(0)
# 统计对的样本
running_corrects += torch.sum(preds == labels.data)
if phase == 'train':
# 学习率更新
scheduler.step()
# epoch平均loss
epoch_loss = running_loss / dataset_sizes[phase]
# epoch准确率
epoch_acc = running_corrects.double() / dataset_sizes[phase]
print(f'{phase} Loss: {epoch_loss:.4f} Acc: {epoch_acc:.4f}')
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
torch.save(model.state_dict(), best_model_params_path)
print(f'Best val Acc: {best_acc:4f}')
model.load_state_dict(torch.load(best_model_params_path))
return model
- 加载模型与预训练权重,更改线性分类层,定义损失函数,定义优化器,定义学习率策略
# 加载模型与预训练权重
model_ft = models.shufflenet_v2_x2_0(weights='IMAGENET1K_V1')
# 更改模型线性层输出类别数
model_ft.fc.out_features=2
# 将模型移动到训练设备
model_ft = model_ft.to(device)
# 损失为交叉熵损失
criterion = nn.CrossEntropyLoss()
# 训练模型所有参数
optimizer_ft = optim.SGD(model_ft.parameters(), lr=0.001, momentum=0.9)
# 学习率策略为StepLR
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
- 调用模型训练
model_ft = train_model(model_ft, criterion, optimizer_ft, exp_lr_scheduler,num_epochs=25)
训练过程输出:
Epoch 0/24
----------
train Loss: 6.4428 Acc: 0.0123
val Loss: 5.1002 Acc: 0.0654
Epoch 1/24
----------
train Loss: 3.1179 Acc: 0.5451
val Loss: 1.6047 Acc: 0.7582
Epoch 2/24
----------
train Loss: 0.9885 Acc: 0.8033
val Loss: 0.7588 Acc: 0.8758
Epoch 3/24
----------
train Loss: 0.4546 Acc: 0.8648
val Loss: 0.5015 Acc: 0.9085
Epoch 4/24
----------
train Loss: 0.3737 Acc: 0.8811
val Loss: 0.4292 Acc: 0.9085
Epoch 5/24
----------
train Loss: 0.2881 Acc: 0.8975
val Loss: 0.3751 Acc: 0.9020
Epoch 6/24
----------
train Loss: 0.2737 Acc: 0.9057
val Loss: 0.3201 Acc: 0.9085
Epoch 7/24
----------
train Loss: 0.2423 Acc: 0.9426
val Loss: 0.3184 Acc: 0.9216
Epoch 8/24
----------
train Loss: 0.2564 Acc: 0.8975
val Loss: 0.3227 Acc: 0.9085
Epoch 9/24
----------
train Loss: 0.2292 Acc: 0.9303
val Loss: 0.3209 Acc: 0.9216
Epoch 10/24
----------
train Loss: 0.2486 Acc: 0.9098
val Loss: 0.2924 Acc: 0.9216
Epoch 11/24
----------
train Loss: 0.2330 Acc: 0.9303
val Loss: 0.3092 Acc: 0.9085
Epoch 12/24
----------
train Loss: 0.2340 Acc: 0.9180
val Loss: 0.3095 Acc: 0.9150
Epoch 13/24
----------
train Loss: 0.2455 Acc: 0.9139
val Loss: 0.3161 Acc: 0.9216
Epoch 14/24
----------
train Loss: 0.2640 Acc: 0.9016
val Loss: 0.2842 Acc: 0.9281
Epoch 15/24
----------
train Loss: 0.2705 Acc: 0.9139
val Loss: 0.2625 Acc: 0.9216
Epoch 16/24
----------
train Loss: 0.2159 Acc: 0.9467
val Loss: 0.2964 Acc: 0.9150
Epoch 17/24
----------
train Loss: 0.2150 Acc: 0.9098
val Loss: 0.3040 Acc: 0.9281
Epoch 18/24
----------
train Loss: 0.2077 Acc: 0.9303
val Loss: 0.3067 Acc: 0.9216
Epoch 19/24
----------
train Loss: 0.2104 Acc: 0.9180
val Loss: 0.3117 Acc: 0.9216
Epoch 20/24
----------
train Loss: 0.2399 Acc: 0.9016
val Loss: 0.3078 Acc: 0.9216
Epoch 21/24
----------
train Loss: 0.2341 Acc: 0.9303
val Loss: 0.2985 Acc: 0.9216
Epoch 22/24
----------
train Loss: 0.2210 Acc: 0.9385
val Loss: 0.3021 Acc: 0.9216
Epoch 23/24
----------
train Loss: 0.2442 Acc: 0.9180
val Loss: 0.3131 Acc: 0.9281
Epoch 24/24
----------
train Loss: 0.2048 Acc: 0.9508
val Loss: 0.2947 Acc: 0.9281
Best val Acc: 0.928105
Grad-CAM算法实现
# 反向传播计算完梯度后,自动调用,用于特征图梯度提取
def backward_hook(module, grad_in, grad_out):
grad_block.append(grad_out[0].detach())
# 前向传播后自动调用,用于特征图提取
def farward_hook(module, input, output):
fmap_block.append(output)
# 计算类向量
def comp_class_vec(ouput_vec):
# 取概率最大的下标
index = np.argmax(ouput_vec.cpu().data.numpy())
# 将标量转换为形状为(1, 1)的二维数组
index = index[np.newaxis, np.newaxis]
# 将index转成tensor
index = torch.from_numpy(index)
one_hot = torch.zeros(1, 1000).scatter_(1, index, 1)
one_hot.requires_grad = True
class_vec = torch.sum(one_hot * ouput_vec)
return class_vec
def gen_cam(feature_map, grads):
# 初始化cam矩阵,形状为(H,W)
cam = np.zeros(feature_map.shape[1:], dtype=np.float32)
# 在第1维(高度)和第2维(宽度)上计算均值,保留第0维(通道)
weights = np.mean(grads, axis=(1, 2))
for i, w in enumerate(weights):
# 对每个channel加权求和
cam += w * feature_map[i, :, :]
# 对 CAM 应用 ReLU 激活函数,确保所有像素值非负
cam = np.maximum(cam, 0)
# 将 CAM 调整为与原始图像相同的大小
cam = cv2.resize(cam, (224, 224))
# 最大最小归一化(0-1)归一化
cam -= np.min(cam)
cam /= np.max(cam)
return cam
def inverse_normalize(inp):
# 对图片进行反归一化
# inp:(c,h,w) -> (h,w,c)
inp = inp.numpy().transpose((1, 2, 0))
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
inp = std * inp + mean
inp = np.clip(inp, 0, 1)
# inp:(h,w,c) -> (c, h, w)
# inp = inp.transpose((2, 0, 1))
return inp
def show_cam_image(img, mask):
heatmap = cv2.applyColorMap(np.uint8(255*mask), cv2.COLORMAP_JET)
heatmap = np.float32(heatmap) / 255
cam = heatmap + np.float32(img)
cam = cam / np.max(cam)
plt.imshow(cam)
plt.show()
def grad_cam(model, img_input, class_names):
# 注册hook
model.stage4[-1].register_forward_hook(farward_hook)
model.stage4[-1].register_full_backward_hook(backward_hook)
# 取模型输出
output = model(img_input.unsqueeze(0))
# 根据输出判断模型类别
idx = np.argmax(output.cpu().data.numpy())
print("predict: {}".format(class_names[idx]))
# 模型梯度清零
model.zero_grad()
class_loss = comp_class_vec(output)
# 反向传播
class_loss.backward()
# 整理grad cap数据
grads_val = grad_block[0].cpu().data.numpy().squeeze()
fmap = fmap_block[0].cpu().data.numpy().squeeze()
# 得到cam图
cam = gen_cam(fmap, grads_val)
og_img = inverse_normalize(img_input)
show_cam_image(og_img, cam)
- 调用函数输出
cam图
fmap_block = []
grad_block = []
inputs, classes = next(iter(dataloaders['val']))
inputs = inputs[0,:,:]
classes = classes[0]
grad_cam(model_ft.to('cpu'), inputs, class_names)
- 输出(图中红色区域是不关注区域,蓝色是关注区域,因为3通道顺序是
BGR所以造成这种现象):

- 为了检验算法是否正确,我们使用pytorch-grad-cam包验证一下,先安装pytorch-grad-cam包
pip install grad-cam -q
- 导入必要包
from pytorch_grad_cam import GradCAM
from pytorch_grad_cam.utils.image import (show_cam_on_image, preprocess_image)
- 定义可视化函数(为了与上面图片颜色通道一致,使用了
cv2.cvtColor()将RGB变为BGR)
def grad_cam_pack(model, rgb_img, input_tensor):
target_layers = [model.stage4[-1]]
cam = GradCAM(model=model, target_layers=target_layers)
grayscale_cam = cam(input_tensor=input_tensor, targets=None)
grayscale_cam = grayscale_cam[0, :]
cam_image = show_cam_on_image(rgb_img, grayscale_cam, use_rgb=True)
cam_image = cv2.cvtColor(cam_image, cv2.COLOR_RGB2BGR)
plt.imshow(cam_image)
# cv2.imwrite('cam_output.png', cam_image)
- 调用可视化函数,生成类激活图
cam
input_tensor = inputs.unsqueeze(0)
rgb_img = inverse_normalize(inputs)
grad_cam_pack(model_ft, rgb_img, input_tensor)
- 可以看到与我们自定义的输出完全一致,说明实现无误。


















 2624
2624

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












{kind=link}