







文章目录
| 文章更新版本 | 时间 | 备注 |
|---|---|---|
| V0.1 | 发布于2019-08-29 11:14:22 | 初始版本 |
| V0.2 | 更新于2019-12-23 18:12:16 | 增加mpu6050方向定义 |
一、开发笔记
1. 数字陀螺仪传感器工作原理
- 陀螺仪:当陀螺仪围绕任何感应轴旋转时,科里奥利效应就会产生电容式传感器检测到的振动。 所得到的信号被放大,解调和滤波产生与角速度成比例的电压。
- 电子加速度计:加速沿着一条特定轴在相应的检测质量上引起位移,引起电容式传感器检测电容的变化。
2. 数字运动处理器(DMP)
- MPU6050自带一个数字运动处理单元,可以计算四元数等,减轻主控制器压力。
- DMP可以通过引脚触发中断。
3. 辅助I2C串行接口
- MPU-60X0 具有一个辅助 I2C 总线,用于与片外3轴数字输出磁力计进行通信或其他传感器。
- 辅助I2C串行接口有两种工作模式:I2C Master Mode和Pass-Through Mode。
4. MPU-60X0 FIFO
- MPU-60X0包含一个可通过串行接口访问的1024字节FIFO寄存器。 FIFO配置寄存器决定哪个数据写入FIFO。 可能的选择包括陀螺仪数据,加速计数据,温度读数,辅助传感器读数和 FSYNC 输入。
5. 数字低通滤波器(DLPF)
- MPU6050自带低通滤波器,可以通过配置寄存器26控制低通滤波频段,减少高频干扰。但是会降低传感器输入速率(开启DLPF加速度计输出1kHZ,关闭DLPF可以输出8Khz)
6. FSYNC帧同步采样引脚
- 寄存器26-EXT_SYNC_SET,用于配置外部帧同步引脚的采样
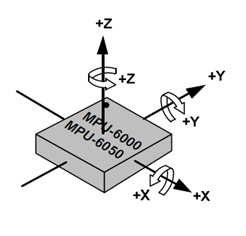
7. MPU6050方向定义
二、MPU6050初始化步骤
- 恢复寄存器默认值
设置PWR_MGMT_1 bit7为1,恢复后bit7为0,bit6自动设置为1,进入sleep模式。 - 设置PWR_MGMT_1 bit6为0,唤醒传感器
- 设置时钟源
- 设置量程
分别设置陀螺仪和加速度计量程。 - 设置采样率
- 设置数字低通滤波器(选配)
三、MPU6050几个重要寄存器
寄存器典型值
| 寄存器 | 典型值 | 功能 |
|---|---|---|
| PWR_MGMT_1 | 0x00 | 正常启用 |
| SMPLRT_DIV | 0x07 | 陀螺仪采用率 125Hz |
| CONFIG | 0x06 | 低通滤波器频率为 5Hz |
| GYRO_CONFIG | 0x18 | 陀螺仪不自检,输出满量程范围为 ± 2000 °/s |
| ACCEL_CONFIG | 0x01 | 加速度计不自检,输出的满量程范围为± 2g |
寄存器117-设备地址-WHO_AM_I
[6:1] 保存设备地址,默认为 0x68,不反应AD0引脚值。

寄存器107-电源管理1-PWR_MGMT_1

DEVICE_RESET:设置为1时,寄存器值设置为默认。
SLEEP 当该位置1时,该位将MPU-60X0置于睡眠模式。
CYCLE 当该位设置为1且SLEEP被禁止时,MPU-60X0将循环在睡眠模式和唤醒之间以LP_WAKE_CTRL(寄存器108)确定的速率从活动传感器获取单个样本数据。
寄存器26-配置数字低通滤波器 -CONFIG

数字低通滤波器(DLPF)取值与滤波频段关系:

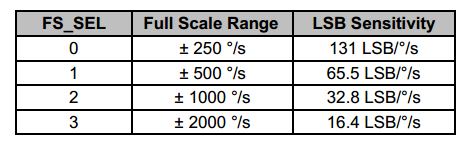
寄存器27 - 陀螺仪量程配置-GYRO_CONFIG

XG_ST-X轴陀螺仪自检,FS_SEL用于配置陀螺仪量程:
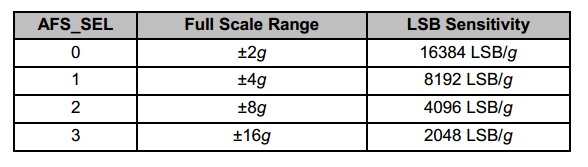
寄存器28 - 加速度计量程配置-ACCEL_CONFIG

寄存器25 - 采样速率分频器-SMPRT_DIV
该寄存器指定用于产生MPU-60X0采样率的陀螺仪输出速率的分频器。传感器寄存器输出,FIFO输出和DMP采样都基于采样率。采样率是通过将陀螺仪输出速率除以 SMPLRT_DIV 产生的。

Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV)
where Gyroscope Output Rate = 8kHz when the DLPF is disabled (DLPF_CFG = 0 or 7), and 1kHz when the DLPF is enabled (see Register 26)
在不开启DLPF的情况下,设置SMPLRT_DIV 为7可以时芯片产生1khz的中断信号。

寄存器59到64-加速度计测量值

大数端存放:地址地位存放数据高位,地址高位存放数据地位。
补码存放:因为测量值为有符号整数,因此采用补码方式存放
寄存器65和66 - 温度测量

寄存器67至72 - 陀螺仪测量值

四、 MPU6050传感器DMP功能
惯性传感器芯片内部一般会集成一个DMP(Digital Motion Processor)处理器,可以直接硬件解算四元数,解放主控资源。
注意关注一下硬件姿态解算,并不是之前印象中的那么难用,在crazypony开源项目中,开发者测试直接从MPU6050的DMP输出四元数,可以做的更加稳定,如果再外加一个磁力计,可以直接输出带有东西南北绝对位置。

五、I2C相关知识
- 数据传输:SCL为高电平时,SDA线若保持稳定,那么SDA上是在传输数据bit;若SDA发生跳变,则用来表示一个会话的开始或结束。
- 数据改变:SCL为低电平时,SDA线才能改变传输的bit。
- 处理繁忙:如果从机处于繁忙状态,并且现在不方便接受下一个字节,可以保持SCL为低电平,从而强制主机进入等待状态,等准备号后释放时钟线。
- 处理应答:应答时钟由主机控制,应答信号-在第9个时钟周期,SCL为高,SDA为低。拒绝应答-在第9个时钟周期,SDA一直为高。





六、调试记录
- 初始化异常报错
检查连接和代码都没有问题,更换传感器模块后正常。此错误为传感器模块质量问题,导致通信不正常。
E (262) I2Cbus: [port:0, slave:0x68] Failed to read 1 bytes from register 0x75, error: 0xFFFFFFFF
E (272) MPU6050: func:uint8_t mpud::MPU::whoAmI() @ line:162, expr:"readByte(regs::WHO_AM_I, buffer)", error:0xFFFFFFFF
E (282) MPU6050: func:esp_err_t mpud::MPU::testConnection() @ line:143, expr:"lastError()", error:0xFFFFFFFF
E (292) example: Failed to connect to the MPU, error=0XFFFFFFFF
更换模块后输出正常(未减去基准值)
















 2470
2470











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









