







说明
该参考设计使用了 AWR2944 评估模块 (EVM),为角雷达应用满足 NCAP R79 安全要求奠定了基础。该设计使用户能够估算和跟踪器件视场内最远 200m 的物体位置(在方位平面中)和速度。该应用主要面向提供多种功能(如盲点检测、前侧来车辅助和变道辅助)的角雷达和前向远距离雷达系统。该设计还演示了 TI 压缩引擎和硬件加速器 (HWA) 功能。 特性 • 使汽车制造商能够使用单芯片雷达传感器满足NCAP R79 安全要求 • 利用第4个发射器实现的卓越射频性能,提供非凡的角雷达性能,获得比传统 3 发射器器件高 33%的角分辨率 • 检测并跟踪最远 200 米处速度为 ±140 千米/小时(kmph) 的物体(如汽车和卡车) • 天线方位角视场为 ±80º,且方位角分辨率约为 9.5º • 展示以下 AWR2944 功能: – TX相移 – 数据压缩 – 支持由毫米波 SDK 提供的多普勒频分多址(DDMA) 处理链的 HWA。 • 使客户建立对毫米波器件功能的信心 • 改进客户开发周期(例如硬件重新设计和软件开发工作)
1 系统说明
车辆的自动控制提供了生活质量和安全方面的好处,除了使相对平凡的驾驶行为更安全,更容易。生活质量功能包括车辆自动停车或确定是否可能变道的能力,以及提供自动巡航控制等功能——车辆与前车保持恒定距离,本质上是跟踪前车的速度。自动刹车和防撞是防止因驾驶员注意力不集中而发生事故的安全功能。这些功能通过观察汽车周围(前方、后方和附近)的区域,并在观察到可能撞到汽车的障碍物时向自动驾驶子系统发出警报。实现这些技术需要各种传感器来检测环境中的障碍物,并随时间跟踪其速度和位置。
1.1 为什么使用雷达
调频连续波(FMCW)雷达可以精确测量障碍物和其他车辆的距离和相对速度;因此,雷达在自动驾驶汽车应用(如变道辅助和交叉交通警报)和汽车安全应用(自动刹车和防撞)中非常有用。雷达相对于照相机和激光雷达(LIDAR)的系统的一个重要优势是,雷达相对不受雨、灰尘和烟雾等环境条件的影响。由于FMCW雷达传输特定的信号(称为chirp)并处理反射,因此它们可以在完全黑暗和明亮的日光下工作(雷达不受眩光的影响)。与超声波相比,雷达通常具有更长的范围和更快的信号传输时间。
1.2 TI角雷达设计
TIDEP-01027是一种介绍性应用,其中AWR2944设备配置用于角落雷达应用,以跟踪200米范围内的目标。
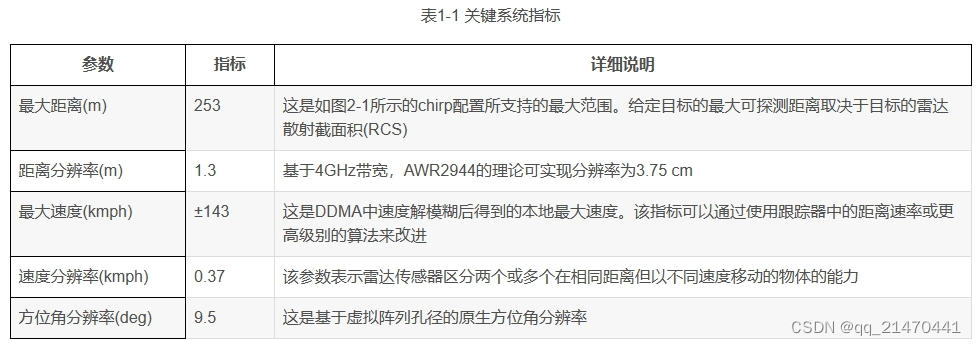
1.3 关键系统指标
本参考设计采用多普勒分多址(DDMA)处理,其中大部分处理在HWA上完成,一些中间任务被卸载到DSP上。
2 系统概况
2.1 模块框图
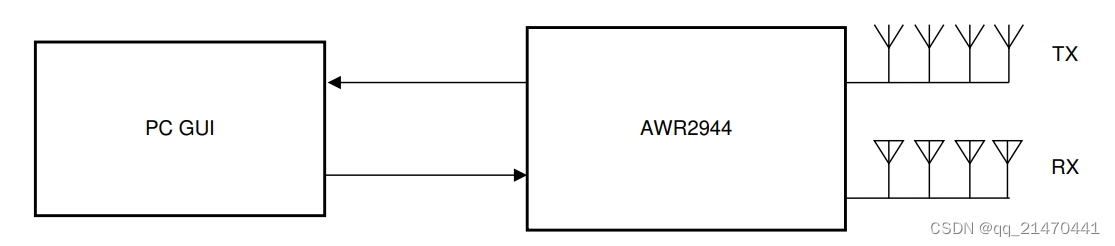
图2-1 高端角雷达系统模块框图
2.2 设计考虑
最新的欧洲NCAP法规第79号规定,传感器应该能够检测到相邻车道上从后方驶来的车辆,距离不超过Srear。距离Srear取决于车辆本身的速度和驶来车辆的速度。为了满足这些要求,雷达传感器必须能够在距离传感器200米的距离上检测到以130公里/小时的速度行驶的车辆。 为了满足这些要求,在AWR2944中使用额外的第4个发射机将方位角分辨率提高到约9.5度。此外,利用TX移相器和改变每个chirp相移的能力,为每个传输通道提供独特的循环相移。这种独特的循环相移允许在多普勒域中分离TX信道,这是一种称为多普勒分多址(DDMA)的MIMO方案。DDMA使得SNR比标准时分复用方案增加10log10(Nt) = 6 dB,其中Nt是发射信道的数量。信噪比的增加导致更大的检测范围。
2.3 爆款产品
2.3.1 AWR2944单片雷达解决方案
TI的AWR2243是一款76 GHz至81GHz的汽车第二代高性能MMIC。该器件是一款具有成本竞争力的单芯片MMIC,可赢得满足170米及NCAP安全要求的高性能中高端角雷达。 AWR2944是一种集成单芯片,频率调制连续波(FMCW)传感器,能够在76GHz至81GHz频段工作。该器件采用TI的低功耗45纳米RFCMOS处理器,以极小的外形实现前所未有的模拟和数字集成水平。该装置有四个接收器和四个发射器,具有一个闭环锁相环(PLL),用于精确和线性chirp合成。该传感器包括一个内置的无线电处理器(BIST),用于射频校准和安全监测。基于复基带架构,传感器器件支持15 MHz的中频带宽,具有可重构的输出采样率。Arm®Cortex®R5F、TI的C66x数字信号处理器(DSP)(固定和浮点)和硬件加速器(HWA 2.0)以及4MB片上RAM的存在使高级算法开发成为可能。
2.3.2 AWR2944评估模块
AWR2944有如下特性: •AWR2944雷达设备 •板上天线(4个发射,4个接收) •基于XDS110的JTAG仿真,带串口,用于板载QSPI flash编程 •60针,高密度(HD)连接器,用于外部JTAG和模拟器接口,支持TRACE和CSI2 •RJ45连接器,通过网络将捕获的数据流式传输到主机PC •MATEnet以太网接口,通过网络将捕获的数据流式传输到汽车主机 •双板载CAN-FD收发器 •12v电源插孔为电路板供电

图2-2 2944评估模块框图
2.4 系统设计理论
2.4.1 天线配置
该TIDEP-01027使用4个接收器和4个发射器在单chirp配置,见图2-3。

图2-3 天线配置
2.4.2 chirp配置和系统性能
为了实现特定的角雷达,使用AWR2944可见距离为200米,内存足够的案例。所使用的chirp配置请参见2-1。
| 参数 | 配置 |
| 空闲时间(us) | 5 |
| ADC启动时间(us) | 5 |
| 调频截止时间 | 18.83 |
| ADC采样个数 | 384 |
| 调频斜率(MHz/uS) | 8.883 |
| MIMO(1->yes) | 1 |
| 配置Chirp数 | 768 |
| 有效chirp时间 | 23.83 |
| 带宽(MHz) | 114 |
| 帧长度(ms) | 250 |
表2-1 chirp配置
| 参数 | 指标 |
| 最大距离(m) | 200 |
| 距离分辨率(m) | 1.3 |
| 最大速度(kmph) | 140 |
表2-2 系统性能参数
备注:表2-1和2-2中的配置和参数以当前应用版本为准,不受设备限制。
此应用程序使用单个遗留帧,其中所有chirp都与一个配置文件配置连接。
2.4.3 数据路径
图2-4中的框图显示了到BSD、LCA和CTA应用的处理数据路径。

图2-4 DDMA处理数据路径流
2.4.4 chirp时序
图2-5显示chirp时序和系统的后续处理。
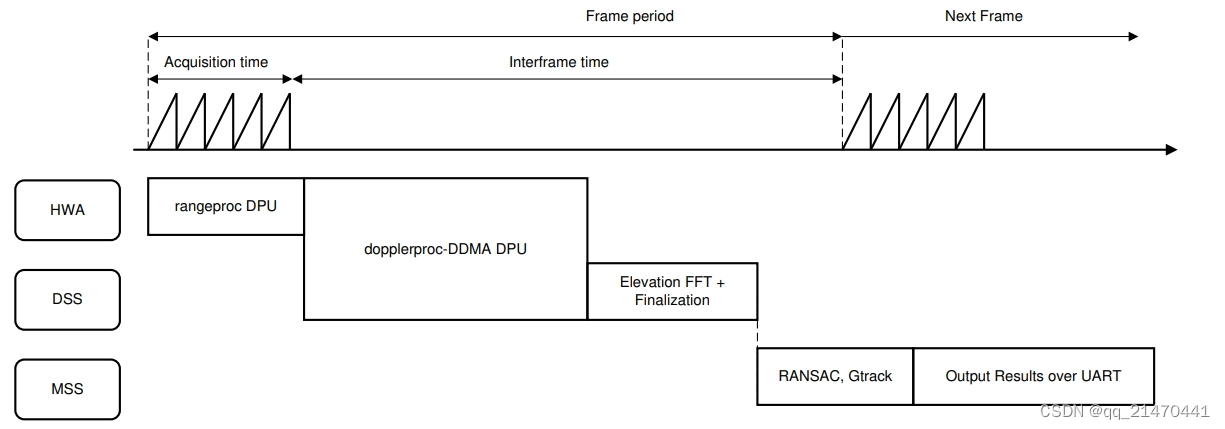
图2-5 chirp时序
chirp捕获发生在雷达前端。前端通过毫米波链路根据chirp配置进行配置。 数据路径处理的核心-从chirp采集到点云输出分为以下高级模块:距离处理数据处理单元(DPU),多普勒处理DDMA DPU,俯仰FFT和终止。 当采集发生时,距离处理DPU与采集并行计算一个个chirp的第一维FFT,压缩输出,并将其作为压缩雷达立方体存储在内存中。 接下来,多普勒处理-DDMA DPU一次解压雷达立方体的一个切片,并通过采用适当的FFT计算每个切片的速度和方位角信息。多普勒处理-DDMA DPU还执行DDMA解调,以根据DDMA方案从六个可能的假设中获得正确的速度。最后,多普勒处理-DDMA DPU还计算了距离CFAR和局部最大值。多普勒处理-DDMA DPU将这些组合起来生成目标列表。多普勒处理-DDMA DPU利用硬件加速器和DSP并行实现这一目标。 在这一步之后,在DSP上进行俯仰FFT,然后是最后一步,计算被检测物体的笛卡尔坐标和速度。 在此之后,RANSAC和GTrack算法在MSS上运行以生成场景的目标列表。这些算法的简要概述将在后面的章节中给出。正如图2-5所示,这部分的处理会溢出到下一帧。这种超限是经过设计的,因为它允许并行利用MSS进行GTrack, RANSAC和UART上的数据传输,而其余的处理在下一帧的HWA+DSP上进行。
2.4.5 eDMA配置
存储器之间的大规模数据移动是使用EDMA完成的。使用EDMA比使用处理器移动数据更有效,因为当数据移动完成时,DSP和HWA可以继续处理数据。EDMA在乒乓缓冲器上工作,这意味着当乒乓缓冲器被填满时,乒乓缓冲器可以被HWA或DSP用于处理。 所需的主要数据传输包括: •将压缩的1D FFT输出从距离处理DPU移动到L3内存。这就形成了压缩的雷达立方体。 •获取压缩雷达立方体的一个切片并将其复制到HWA内存中进行解压缩。 •将雷达立方体的解压缩切片复制到L3的刮擦缓冲区中以供进一步处理。 •拷贝解压后的雷达立方体切片,一次一个距离门到HWA进行多普勒处理。 •将2D FFT输出从HWA存储器移动到L2的多普勒FFT刮擦子矩阵缓冲区。 •将CFAR, Local Max和方位FFT的输出从HWA内存移动到L2的缓冲区。 •在相关输入EDMA完成时触发HWA处理(通过链接EDMA将一个热签名写入相应的HWA寄存器)。
2.4.6 内存分配
AWR2944有如下的内存: •2.5MB的DSS L3 RAM •384KB的DSS L2 RAM •32KB的DSS L1D RAM •32KB的DSS L1P RAM •960KB的MSS L2 RAM 备注:AWR2944的L3 RAM,ES1.0:2.25MB,ES2.0:3MB。 在可用的32KB L1P RAM和L1D RAM中,L1P RAM的一半(16KB)和L1D RAM的一半(16KB)用作缓存。剩下的一半留给代码和数据,是未使用的。 DSS L2 RAM用于: •文本部分(代码) •数据刮擦缓冲区 •DDMA多普勒FFT解调子矩阵 •RTOS任务栈 DSS L3 RAM用于: •存储压缩后的雷达立方体 •将解压后的雷达立方体切片存储在刮擦缓冲区中进行处理 •对象列表 MSS L2 RAM用于: •文本部分(代码) •复制由DSS制作的L3中的点云。这使得DSS可以并行地处理下一帧。 •在笛卡尔坐标系和极坐标系统之间进行转换,以匹配RANSAC和GTrack算法 •用于GTrack的缓冲区 处理雷达信号的每一步处理阶段都需要大量的划痕缓冲器。通过覆盖划痕缓冲区,可以有效地使用可用内存。在前一阶段使用的暂存缓冲区可以在当前阶段重复使用。关于这个内存布局的更多细节可以在mmWave SDK文档中找到。
2.4.7 DDMA
多普勒分多址(DDMA)是一种允许同时传输所有TX信道的MIMO方案。这允许提高发射功率,因此有更高的信噪比。在DDMA中,不同TX信道之间的正交性是通过使用移相器对每个TX进行唯一的循环相位序列编码来获得的。图2-6说明了DDMA调制的工作原理。在时域,一个唯一的相移被应用到每个TX通道。这个相位值是每个chirp恒定的,并随着chirp索引的增加而增加。如果有Nt个发射机,每个发射机以相位ωk = 2π (k−1) /Nt调制,为chirp索引。图2-6中的例子Nt = 3。正交性发生在图2-7所示的多普勒频域。因此,经过多普勒FFT后,来自不同TX通道的信号自然被分离。然而,由于多普勒频率复用,允许的最大目标速度减少了Nt倍,类似于时分复用(TDM) MIMO。使用零填充或相位抖动的假设检验可以恢复最大速度。
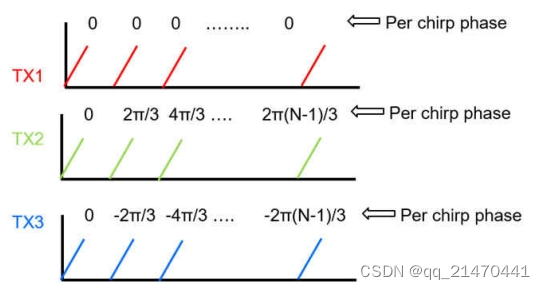
图2-6 非空DDMA调制
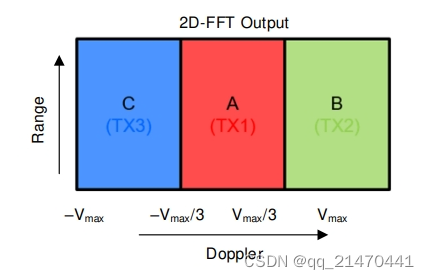
图2-7 DDMA多普勒频谱
2.4.8 空子带DDMA
可以对TX信道进行编码,在多普勒频谱中引入空带。这允许在DDMA中更稳健的速度不模糊和多普勒bin到TX通道的映射。为了引入两个空的多普勒子带,添加到每个TX通道的相位被修改为ωk = 2π (k−1)/( Nt + 2)。图2-8和图2-9显示了Nt = 4和两个空带的距离-多普勒平面。这些空多普勒子带的位置被用来找到将确定正确的TX通道映射的假设,并允许如图2-10所示的速度不模糊。
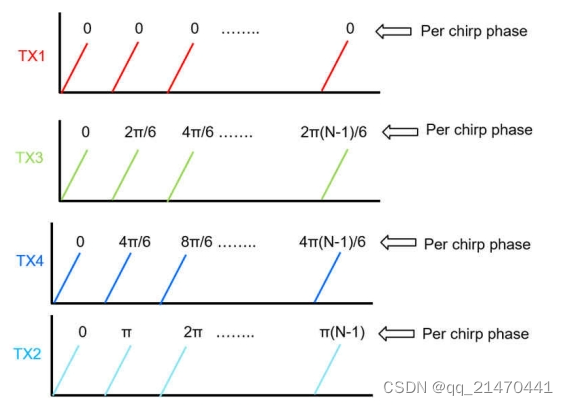
图2-8 DDMA调制
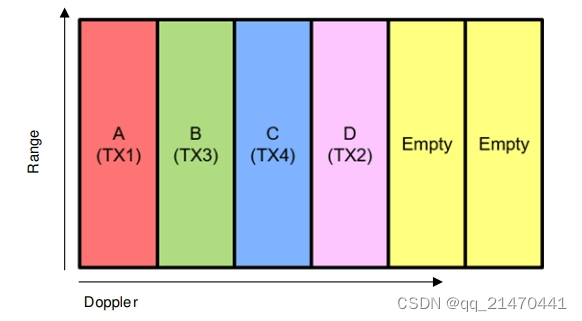
图2-9 4个发射机和2个空子带的DDMA多普勒频谱
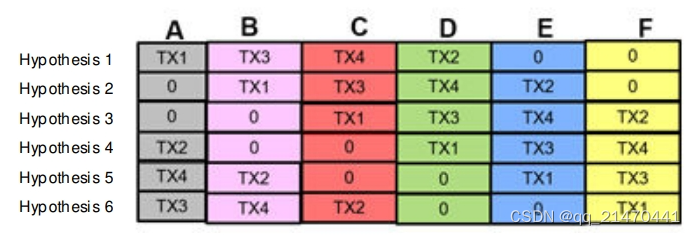
图2-10 不同假设对应于不同空子带位置
2.4.9 随机采样一致性
雷达测量目标和雷达传感器之间的相对径向速度。在一些情况下,需要了解相对速度是由于目标的运动还是由于自车本身的运动。在这个参考设计中,我们使用一种称为随机采样一致性 (Random sampling and Consensus)的统计算法将检测点的速度剖面(径向速度作为方位角的函数)拟合到运动模型中,以区分自车环境中运动和静止目标的反射。关于该算法的更多细节可以在《Instantaneous ego-motion estimation using Doppler radar》中找到。雷达检测到的被分类为来自运动物体的点被用作跟踪算法的输入。
2.4.10 群跟踪器
真实世界的雷达目标(汽车、行人等)作为一组多个反射点呈现给跟踪处理层。这些测点组成了一组与距离、角度、信噪比和径向速度相关的测量值。群跟踪器,在2D中基于恒定加速度运动模型随时间跟踪一组点(也称为群体)。图2-11显示了群跟踪算法的主要功能模块。白色显示的子块是经典的扩展卡尔曼滤波(EKF)操作。橙色显示的子块是为支持多点分组而添加的。关于群跟踪算法的更多细节可以在《Group Tracker Parameter Tuning Guide for the 3D People Counting Demo》中找到。
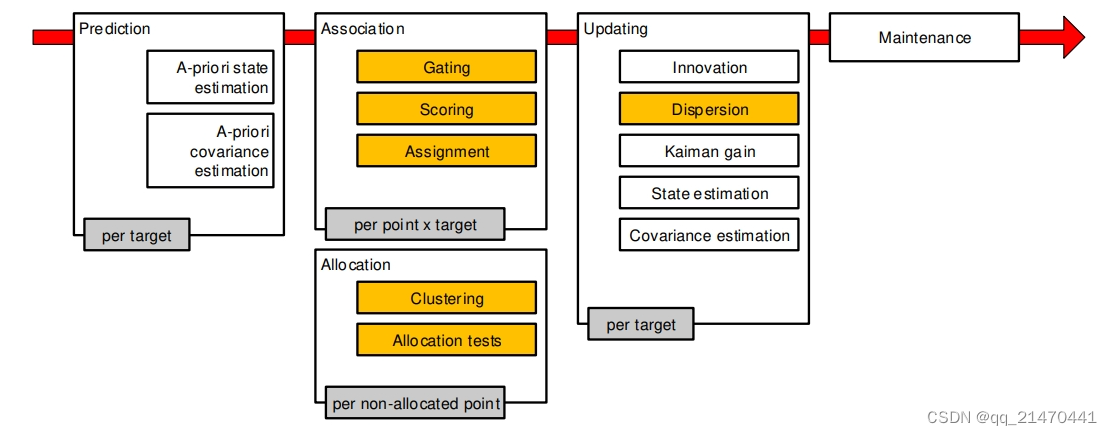
图2-11 群跟踪器模块框图
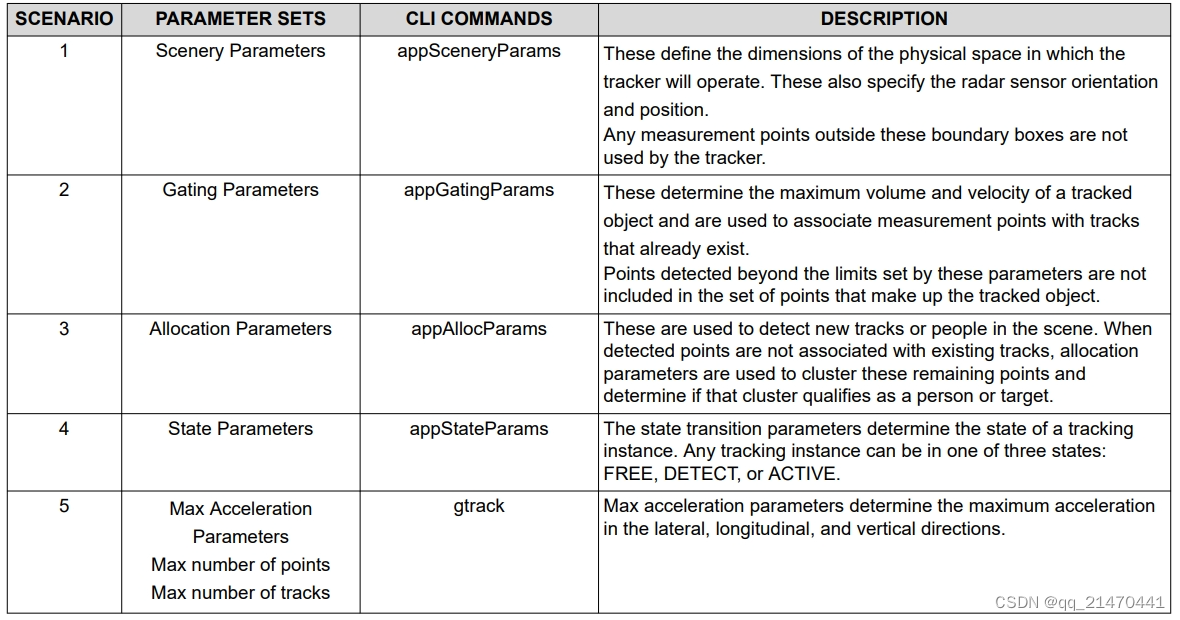
这些参数集可以根据测试结果或根据场景要求进行调整。
表2-3 群跟踪器参数设置
| 场景 | 参数集 | CLI命令 | 描述 |
| 1 | 风景参数 | appSceneryParams | 这些定义了跟踪器将在其中运行的物理空间的尺寸。这些还指定了雷达传感器的方向和位置。跟踪器不使用这些边界框之外的任何测量点。 |
| 2 | 门控参数 | appGatingParams | 这些参数确定被跟踪物体的最大体积和速度,并用于将测量点与已经存在的轨迹相关联。检测到超出这些参数设置的限制的点不包括在构成跟踪对象的点集中。 |
| 3 | 分配参数 | appAllocParams | 这些参数用于检测场景中的新轨迹或人员。当检测到的点未与现有轨迹关联时,分配参数将用于对这些剩余点进行聚类,并确定该聚类是否符合人员或目标的条件。 |
| 4 | 状态参数 | appStateParams | 状态转换参数确定跟踪实例的状态。任何跟踪实例都可以处于以下三种状态之一:FREE、DETECT 或 ACTIVE。 |
| 5 | 最大加速度参 数最大点数 最大轨道数 | gtrack | 最大加速度参数决定了横向、纵向和垂直方向的最大加速度。 |
3 硬件、软件、测试需求和测试结果
3.1 需要的硬件和软件
AWR2944 BoosterPack™插件模块是用于AWR2944毫米波传感器件的易于使用的评估板。BSD、LCA和CTA应用运行在AWR2944BOOST EVM上,并通过USB连接到与EVM相连的PC上运行的可视化工具。使用该板的详细信息请参见AWR2944评估模块(AWR2944BOOST)单芯片毫米波传感解决方案用户指南。BSD、LCA和CTA设计是一个使用毫米波SDK构建的应用。因此,需要从毫米波软件开发工具包(SDK)中安装毫米波SDK。BSD、LCA和CTA设计的源代码可以在TI资源管理器的毫米波汽车工具箱中找到。用于构建此代码的MMWAVE-MCUPLUS-SDK版本在演示软件发行说明中提供。
3.1.1 硬件
AWR2944 EVM核心设计包括: •AWR2944器件:单片77 GHz雷达器件,集成DSP和HWA •使用低压差线性稳压器(LDO)和电源管理集成电路(PMIC) DC/DC电源的电源管理网络(LP887451-Q1和LP63635-Q1) •EVM还承载了一个设备,以协助板载仿真和UART仿真通过USB链接PC和以太网端口。
3.1.2 软件和GUI
相关软件托管在TI资源资源管理器汽车工具箱上。
DEMO界面配置如图3-1所示。 GUI工具的第一个窗口允许用户配置演示。在第一个选项卡(UART端口选项)中,UART端口是根据设备管理器设置配置的。如果用户需要更改默认应用程序的一些内置配置,那么在第二个选项卡中加载配置文件是可选的。第三个选项卡配置GUI上的范围,它只配置GUI而不配置雷达。最后一个选项卡有一个记录和重放选项列表,允许录制和重放UART记录。
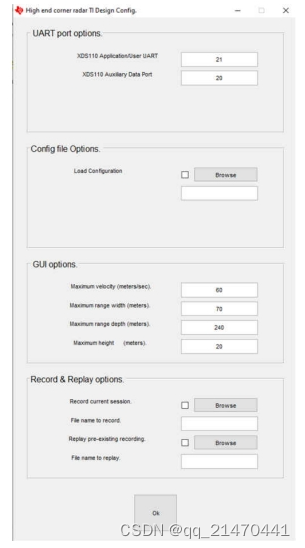
图3-1 GUI首页屏幕
一旦单击OK按钮,默认GUI就会启动。 参见图3-2的GUI屏幕截图,其中标注了不同的组件。
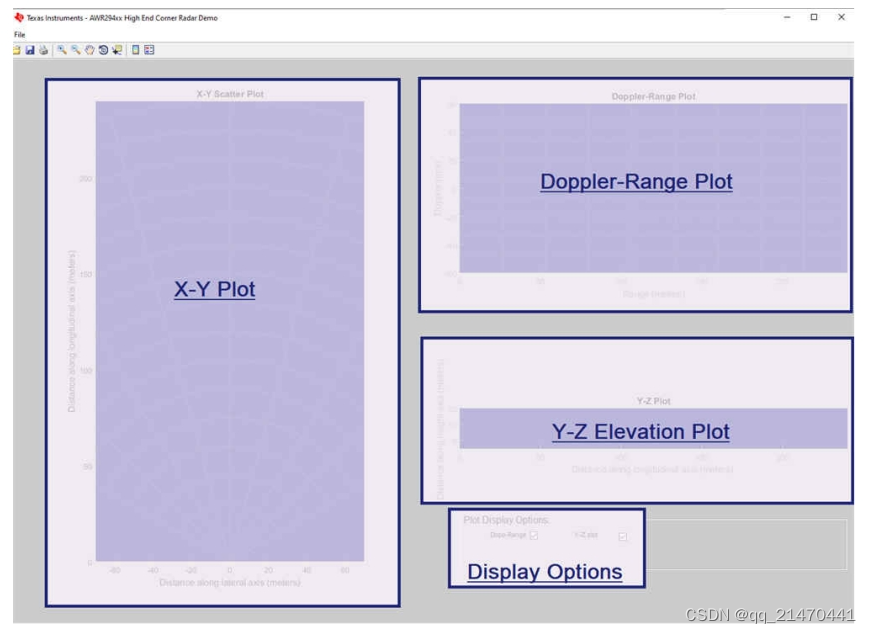
图3-2 GUI画图屏幕
MATLAB®GUI由五个部分组成: •X-Y散点图显示点云的位置,轨迹 •Y-Z图:显示被检测物体的俯仰 •多普勒距离图:显示点云和轨迹的多普勒距离坐标 •显示选项,用以隐藏一些绘图,如果可视化工具滞后绘制点云。
3.2 测试设置
AWR2944角雷达功能的性能通过汽车工具箱中的TI资源管理器lab01027中的演示进行测试。测试使用AWR2944BOOST EVM。图3-3演示了一个测试设置场景。AWR2944EVM安装在中型车的后端。

图3-3 测试设置
3.3 测试结果
图3-4、图3-5和图3-6的结果对应于中型SUV和摩托车检测到的最大续航里程。
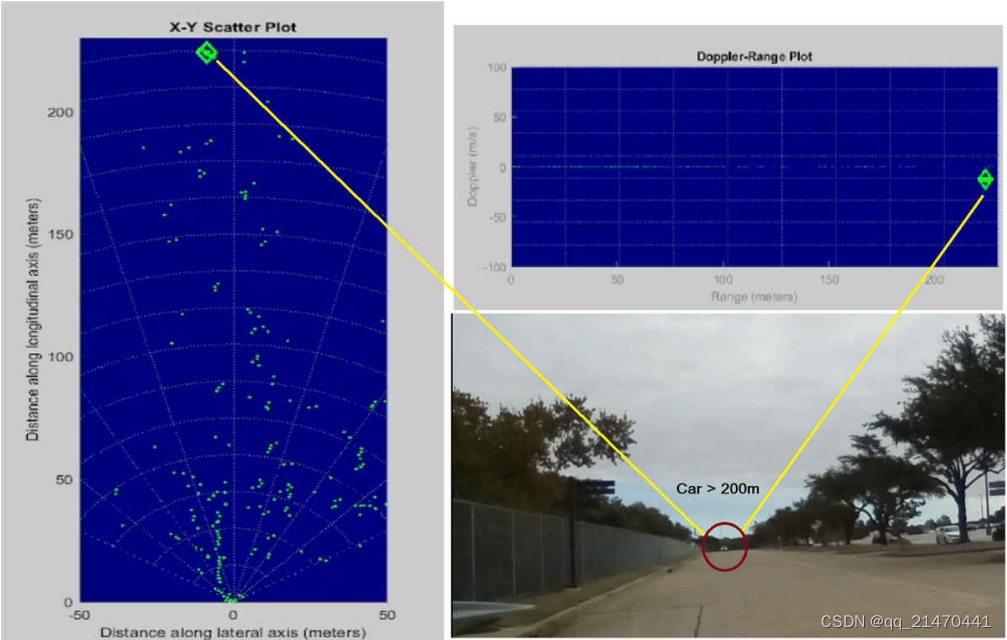
图3-4 测试结果(轿车大约200m)
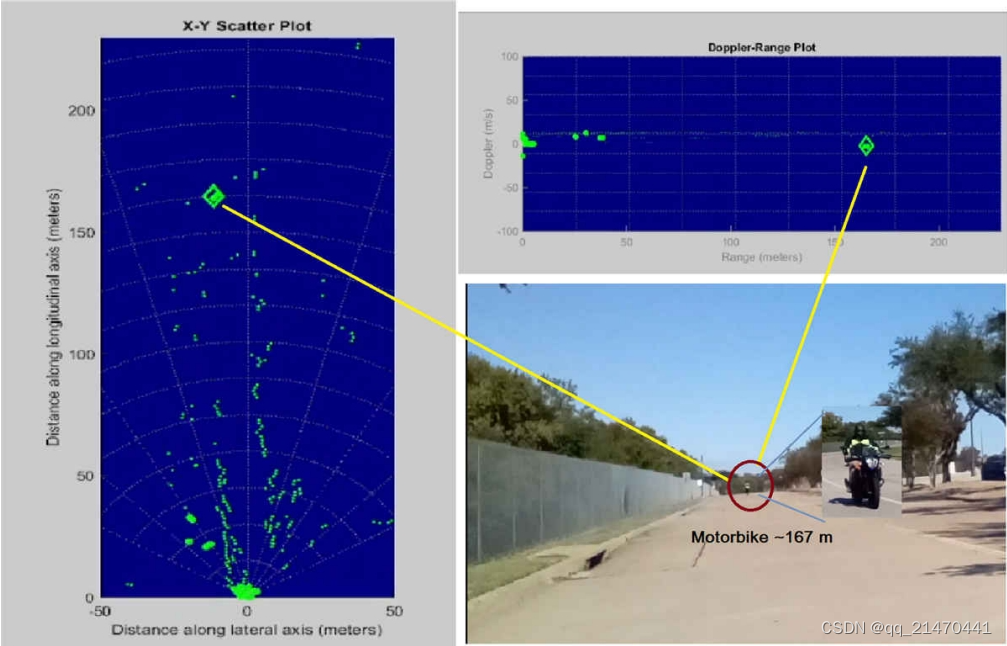
图3-5 测试结果(自行车大约170m)
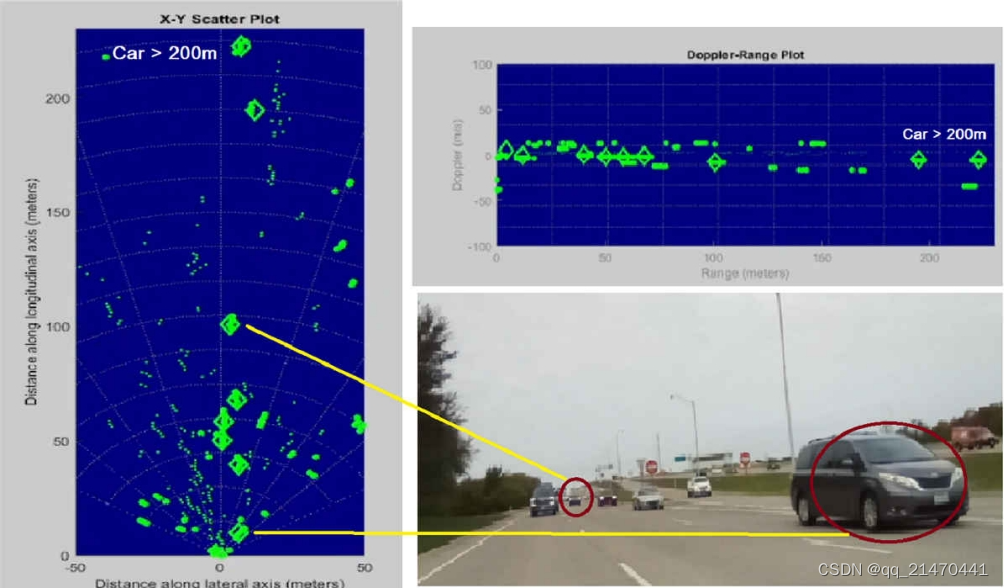
图3-6 高速测试结果


















 2162
2162

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









