






目录
1. Separating Axis Theorem (SAT)
2. Gilbert Johnson Keerthi (GJK)
1. Separating Axis Theorem (SAT)
1. 1 凸多边形
如果一个多边形内部任意两点(包含顶点)间的线段位于多边形的内部或边上,那这种多边形是凸多边形。
非凸多边形的实例:
通常一个非凸多边形可以划分为两个以上的凸多边形:
1.2 投影(Projection)
一般地,用光线照射物体,在某个平面(地面、墙壁等)上得到的影子叫做物体的投影。
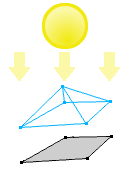
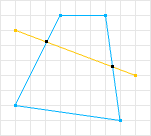
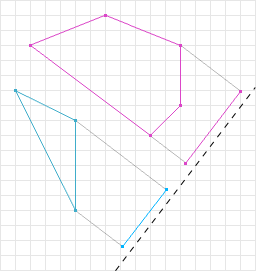
通常一个立体的在某一个平面的投影为一个多边形。而在这里,我们主要关注2D的碰撞检测,所以接下来我们需要清楚在多边形在直线上的投影,下图中右下方独立的蓝色和粉红色线段即为多边形在直线(灰色虚线)上的投影。
多边形在轴上投影的伪代码如下所示:
function Projection(Convex shape, Axis axis){
double min = axis.dot(shape.vertices[0]);
double max = min;
for (int i = 1; i < shape.vertices.length; i++) {
// NOTE: the axis must be normalized to get accurate projections
double p = axis.dot(shape.vertices[i]);
if (p < min) {
min = p;
} else if (p > max) {
max = p;
}
}
Projection proj = new Projection(min, max);
return proj;
}1.3 分离轴定理
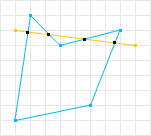
若两个凸多边形没有发生碰撞,则总会存在一条直线,两个多边形在这条直线上的投影没有重叠,如图6右侧图所示,蓝色线段和粉红色线段没有重叠部分,其中右侧图中灰色线就是一条分离轴(主观理解是下图左侧图的虚线应该叫分离轴,但是这是错误的)。
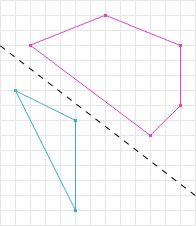
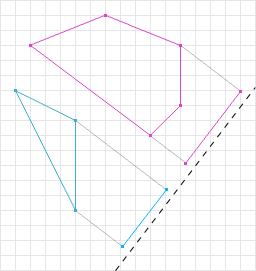
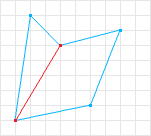
若两个多边形碰撞,则无法找到这样一条分离轴,能使两个多边形在直线上的投影不重叠,这种情况的实例如图7所示,两个多边形在任何一条轴上的投影都有重叠部分。

通常情况下,SAT需要测试很多条轴(下文将解释如何获取这些轴axes),但是只要可以找到一条轴,使多边形投影不重叠,即可判断两多边形不碰撞,SAT算法伪代码如下,true 为碰撞,false为不碰撞:
function SAT(Convex shape1,Convex shape2,Axis[] axises){
// loop over the axes
for (int i = 0; i < axises.length; i++) {
Axis axis = axises[i];
// project both shapes onto the axis
Projection p1 = shape1.project(axis);
Projection p2 = shape2.project(axis);
// do the projections overlap?
if (!p1.overlap(p2)) {
// then we can guarantee that the shapes do not overlap
return false;
}
}
return true;
}1.4 分离轴获取
这个部分我们将如何获取分离轴,即上方伪代码中的Axis[] axises 的获取方式。SAT算法作者提出了一个非常棒的想法:选取多边形每条边的垂线。
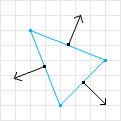
对于一个多边而言,根据其各条边,可以确定的分离轴伪代码如下:
function GetAxises(Convex shape){
Vector[] axes = new Vector[shape.vertices.length];
// loop over the vertices
for (int i = 0; i < shape.vertices.length; i++) {
// get the current vertex
Vector p1 = shape.vertices[i];
// get the next vertex
Vector p2 = shape.vertices[i + 1 == shape.vertices.length ? 0 : i + 1];
// subtract the two to get the edge vector
Vector edge = p1.subtract(p2);
// get either perpendicular vector
Vector normal = edge.perp();
// the perp method is just (x, y) => (-y, x) or (y, -x)
axes[i] = normal;
}
}获取分离轴、再根据分离轴确认两多边形是否碰撞的流程如下:
function SATCollisionDetection(Convex shape1, Convex shape2){
Axis[] axes1 = shape1.GetAxises();
Axis[] axes2 = shape2.GetAxises();
// loop over the axes1
for (int i = 0; i < axes1.length; i++) {
Axis axis = axes1[i];
// project both shapes onto the axis
Projection p1 = shape1.Projection(axis);
Projection p2 = shape2.Projection(axis);
// do the projections overlap?
if (!p1.overlap(p2)) {
// then we can guarantee that the shapes do not overlap
return false;
}
}
// loop over the axes2
for (int i = 0; i < axes2.length; i++) {
Axis axis = axes2[i];
// project both shapes onto the axis
Projection p1 = shape1.Projection(axis);
Projection p2 = shape2.Projection(axis);
// do the projections overlap?
if (!p1.overlap(p2)) {
// then we can guarantee that the shapes do not overlap
return false;
}
}
// if we get here then we know that every axis had overlap on it
// so we can guarantee an intersection
return true;
}2. Gilbert Johnson Keerthi (GJK)
2.1 Minkowski sum 介绍
给定向量集合 A、B,定义他们的Minkowski sum为 :
定义向量集合 A、B的Minkowski Difference 为:
2.2 GJK 算法核心思想
本质就是利用Minkowski差来判断2个几何体有没碰撞。因为如果碰撞了,那么2个几何体至少包含了同一个点,也就意味着它们的Minkowski差(第二幅图)必然包含原点:
2.3 单纯形 Simplex
通常情况下,我们使用GJK 算法核心思想去判断两个凸多边形是否碰撞,不会直接去求两个多边形的Minkowski差。GJK算法告诉我们需要在Minkowski差多边形内构建单纯形,然后判断单纯形是否包含原点,如果包含原点,则发生碰撞。接下来,我们将介绍什么是单纯形,以及如何“在Minkowski差多边形内”构建单纯形(见2.4)。
单纯形或者n-单纯形是和三角形类似的n维几何体。精确的讲,单纯形是某个n维以上的欧几里得空间中的(n+1)个仿射无关(也就是没有m-1维平面包含m+1个点;这样的点集被称为处于一般位置)的点的集合的凸包。
示例:
0 阶单纯形:

1 阶单纯形:
2阶单纯形:
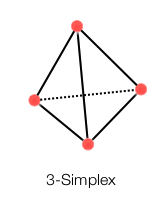
3阶单纯形:
2.4 Support Function
接下来阐述一下怎么构建单纯形,单纯形的构建过程为迭代过程,每一步都会调用support function (公用叫法)。support function 返回值为Minkowski差多边形内的一个点。
support function :
- 假设初始方向为
,任选其中一个多边形的所有顶点投影到这个方向上,求出最大点。
- 再将初始方向取反,即
。然后将另外一个多边形的所有顶点投影到这个方向上,求出最大点。
- 获得的两个点相减,即可得到单纯形上的一点。
Point support(Convex shape1, Convex shape2, Vector a) {
// d is a vector direction (doesn't have to be normalized)
// get points on the edge of the shapes in opposite directions
Point p1 = shape1.getFarthestPointInDirection(d);
Point p2 = shape2.getFarthestPointInDirection(d.negative());
// perform the Minkowski Difference
Point p3 = p1.subtract(p2);
// p3 is now a point in Minkowski space on the edge of the Minkowski Difference
return p3;
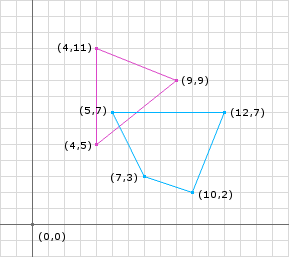
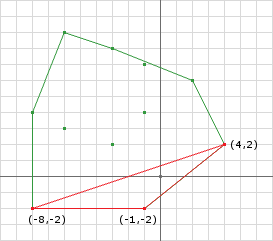
}举个栗子:
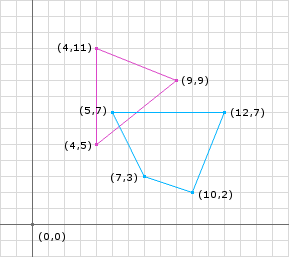
创建单纯形:
iteration 1: 取 ,粉色多边形在
上投影最远的点为
蓝色多边形在-
上投影的最大点为
,他们的差值为
p1 = (9, 9)
p2 = (5, 7)
p3 = p1 - p2 = (4, 2)
iteration 2: 取 ,粉色多边形在
上投影最远的点为
蓝色多边形在-
上投影的最大点为
,他们的差值为
p1 = (4, 5)
p2 = (12, 7)
p3 = p1 - p2 = (-8, -2)
iteration 3: 取 ,粉色多边形在
上投影最远的点为
蓝色多边形在-
上投影的最大点为
,他们的差值为
p1 = (4, 11)
p2 = (10, 2)
p3 = p1 - p2 = (-6, 9)
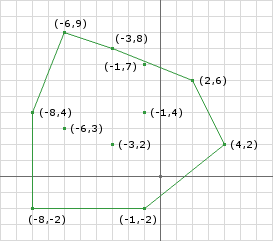
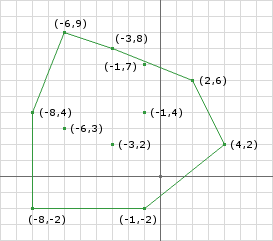
至此我们获得的单纯形为如图所示:
此刻构建的单纯形,并不包含原点,但是我们如果对iteration3 中的重新选取,选取
,则有:
p1 = (4, 5)
p2 = (5, 7)
p3 = p1 - p2 = (-1, -2)
重新选取之后的单纯形为:
事实证明方向的选择会影响结果。那我们如何更好地选取
呢,或者如何改进迭代算法呢?
2.5 自行迭代求取方向 2D Convex GJK:
迭代方向的求取如下伪代码第六行:
d = ... /// initial direction
a = support(..., d) /// first point
b = support(..., -d) /// second point
AB = b - a
AO = ORIGIN - a
d = (AB x AO) x AB /// new direction !!!!!
c = support(..., d) /// final point for 2D simplex那么引入迭代方向之后的GJK思路为:
1. 判断当前构建的单纯形是否包含原点;
2. 我们是否能逼近原点.(迭代构建新单纯形的过程中尽量保留上一步中离原点近的边)
退出条件:
1. 单纯形包含原点;
2. 新的support点与迭代方向的点乘结果小于0;
具体的伪代码如下所示:
Vector d = // choose a search direction
// get the first Minkowski Difference point
Simplex.add(support(A, B, d));
// negate d for the next point
d.negate();
// start looping
while (true) {
// add a new point to the simplex because we haven't terminated yet
Simplex.add(support(A, B, d));
// make sure that the last point we added actually passed the origin
if (Simplex.getLast().dot(d) <= 0) {
// if the point added last was not past the origin in the direction of d
// then the Minkowski Sum cannot possibly contain the origin since
// the last point added is on the edge of the Minkowski Difference
return false;
} else {
// otherwise we need to determine if the origin is in
// the current simplex
if (containsOrigin(Simplex, d) {
// if it does then we know there is a collision
return true;
}
}
}
boolean containsOrigin(Simplex s, Vector d) {
// get the last point added to the simplex
a = Simplex.getLast();
// compute AO (same thing as -A)
ao = a.negate();
if (Simplex.points.size() == 3) {
// then its the triangle case
// get b and c
b = Simplex.getB();
c = Simplex.getC();
// compute the edges
ab = b - a;
ac = c - a;
// compute the normals
abPerp = tripleProduct(ac, ab, ab);
acPerp = tripleProduct(ab, ac, ac);
// is the origin in R4
if (abPerp.dot(ao) > 0) {
// remove point c
Simplex.remove(c);
// set the new direction to abPerp
d.set(abPerp);
} else {
// is the origin in R3
if (acPerp.dot(ao) > 0) {
// remove point b
Simplex.remove(b);
// set the new direction to acPerp
d.set(acPerp);
} else{
// otherwise we know its in R5 so we can return true
return true;
}
}
} else {
// then its the line segment case
b = Simplex.getB();
// compute AB
ab = b - a;
// get the perp to AB in the direction of the origin
abPerp = tripleProduct(ab, ao, ab);
// set the direction to abPerp
d.set(abPerp);
}
return false;
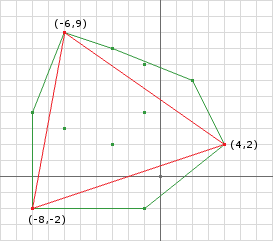
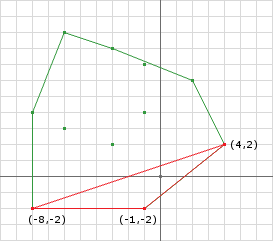
}咱接着这个图结合上述伪代码继续唠:
outside of loop:
d = (1, -1);
p1 = support(A, B, d) = (9, 9) - (5, 7) = (4, 2);
Simplex.add(p1);
d.negate() = (-1, 1);loop:
iteration1:
last = support(A, B, d) = (4, 11) - (10, 2) = (-6, 9);
proj = (-6, 9).dot(-1, 1) = 6 + 9 = 15
// we past the origin so check if we contain the origin
// we dont because we are line
// get the new direction by (AB x AO) x AB
AB = (-6, 9) - (4, 2) = (-10, 7);
AO = (0, 0) - (-6, 9) = (6, -9);
(AB x AO) x AB = AO(149) - AB(-123)
= (894, -1341) - (1230, -861)
= (-336, -480)
= (-0.573, -0.819)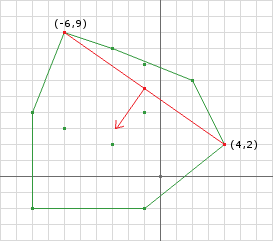
iteration2:
last = support(A, B, d) = (4, 5) - (12, 7) = (-8, -2)
proj = (-8, -2).dot(-336, -480) = 2688 + 960 = 3648
// we past the origin so check if we contain the origin
// the new direction will be the perp of (4, 2) and (-8, -2)
// and the point (-6, 9) can be removed
AB = (-8, -2) - (4, 2) = (-12, -4);
AO = (0, 0) - (-8, -2) = (8, 2);
(AB x AO) x AB = AO(160) - AB(-104)
= (1280, 320) - (1248, 416)
= (32, -96)
= (0.316, -0.948)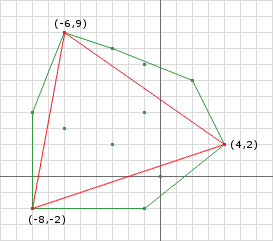
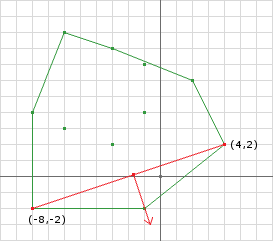
注解: 在第二次循环之后,发现原点不在单纯形内。此时我们将单纯形中的点(-6,9)移除,继续迭代
iteration3:
last = support(A, B, d) = (4, 5) - (5, 7) = (-1, -2)
proj = (-1, -2).dot(32, -96) = -32 + 192 = 160
// we past the origin so check if we contain the origin















 9623
9623











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









