






【摘 要】对无人系统技术进行了综合评述,并对其发展趋势进行了展望。首先,基于美国国防部八版无人机/无人系统路线图的规划,深入分析了互操作性、自主性、人机协同、通信、网络安全、动力与能源、载荷等主要技术方向的内涵和关键能力,绘制了各个技术方向的发展规划脉络。随后,调研分析了美国在不同技术方向的发展现状和应用情况。最后,综合路线图分析和发展情况分析,研判了未来无人系统技术的发展趋势。综述表明,未来无人系统技术将呈现体系化、智能化、高能化三大发展趋势。所提出的从路线图规划和发展现状分析来研判无人系统技术发展的方法对厘清无人系统技术体系和发展趋势具有一定借鉴意义。
关键词 自主性;互操作性;人机协同;通信;网络安全;动力与能源;载荷;高能化
1 引 言
无人系统(Unmanned System,US)是指由无人平台、任务载荷、测控与信息传输系统、控制站等组成的系统[1]。针对无人系统技术体系和发展目前已开展了大量研究[2-9]。
为适应日益复杂的运用环境和不断拓展的任务需求,美国无人系统发展路线图在总结前期无人系统“研发、生产、测试、训练、作战、保障”经验的基础上,规划未来10至25年间无人系统的发展,针对性提出所面临的关键技术挑战。2001年以来,美国国防部已发布了八版无人机/无人系统路线图[10-17],如图1所示。
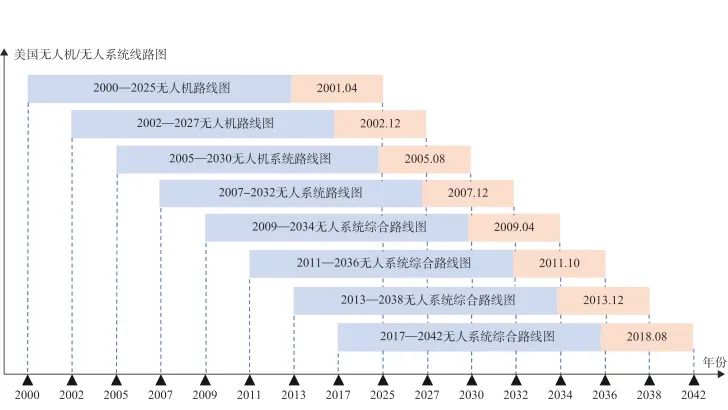
图1 无人机/无人系统路线图
Fig.1 UAV/UAS roadmaps
综合分析美国国防部发布的各版路线图,可以看出美国无人系统技术的发展主要有以下几个技术方向:
● 自主性(2009,2011,2013,2017版)
● 互操作性(2009,2011,2013,2017版)
● 人机协同(2009,2017版)
● 通信(2009,2011,2013版)
● 网络安全(2013,2017版)
● 动力与能源(2009,2011版)
● 载荷(2013版)
针对上述七个技术方向,本文将分别深入分析主要技术方向的内涵、关键能力,绘制发展脉络,并进一步分析无人系统技术发展趋势。
2 美无人系统路线图和技术体系分析
2.1 自主性技术
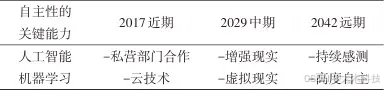
自主性技术的内涵主要是指在没有人工/外部干预的条件下,无人系统能够在设计人员制定的行为规则或策略的限制下,自主导引向目标趋近的过程[15]。高自主性的无人系统可以减轻操作员的认知负荷,使其能够进行更高层级的任务监督与执行控制,降低人为操作带来的风险[17]。无人系统自主性的关键技术包括自主感知技术、自主控制技术和其他使能技术,发展脉络如图2所示。该发展脉络是根据各版本路线图中关于自主性的发展规划,从中提取核心关键技术融合绘制而成。以2017—2042版无人系统综合路线图中关于自主性技术的描述为例,其将“人工智能和机器学习”作为自主性实现的关键能力之一,其未来发展如表1所示,路线图中描述为“近期……,国防部应该大量利用云技术并进行改进,以适配于人工智能/机器学习解决方案”“中远期……,国防部应该加大对增强现实和虚拟现实接口的投入,加强无人系统与人类操作员之间的互动”[17]。因此在图2中的自主性技术的其他使能技术中,将云技术绘制在2017年前后主要发展的技术,将增强现实、虚拟现实等绘制在2029年前主要发展的技术。需要说明的是图中各大技术的年份只是展示了其在路线图出现的年份或者规划的年份,其框图宽度不具有实际意义。
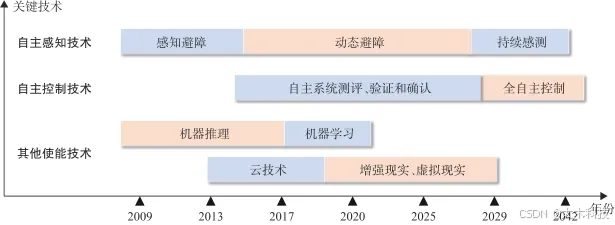
图2 自主性技术发展脉络
Fig.2 The development of autonomous technology
表1 2017版路线图中关于自主性的发展规划[17]
Table 1 The development plan for autonomy in the 2017 roadmap[17]
自主性技术的关键能力在于无人系统能够理解并适应环境,在任务分配、处理、利用和发布过程中实现更高的自主能力,能够与其他自主系统协作,并具备新的验证与确认方法。
2.2 互操作性技术
互操作性技术的内涵主要是指多个无人系统在执行任务时协同行动的能力,可减少系统综合集成时间、精简后勤,降低使用成本,提高作战能力[15]。
无人系统互操作性的关键技术包括互操作基础技术、互操作架构技术、互操作接口技术和互操作指控技术,发展脉络如图3所示。具有互操作性的无人系统可以起到两个不同系统间翻译器的作用,并具有获取和处理不同类型数据的多格式处理、联合任务计算等关键能力。此外,互操作性还具有支持不同有效载荷安装和卸载的通用有效载荷适配器和零部件互换功能。
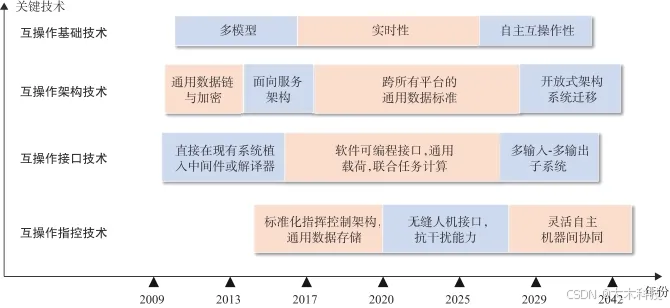
图3 互操作性发展脉络
Fig.3 The development of interoperability
2.3 人机协同技术
未来的无人系统应该同有人系统一起工作,实现高等级的人机协同和战斗编组,人机协同技术是指将人的意图识别与判断能力,与人工智能、机器学习和自主化等技术相结合,使空中、地面和海上无人系统进行战术至战略层面同步协同操作,从而产生更好的态势感知能力、生存能力和杀伤能力,具有不对称的协同和优势[17]。人机协同技术的发展脉络如图4所示。通过理解人操作和收集来自无人系统的信息机制并发展数据战略,开发人机接口实现人机编组,以同时让作战人员、飞行员、海军陆战队员、水手和平民与有人和无人系统一起工作,产生更好的杀伤能力、生存能力和态势感知能力[17]。
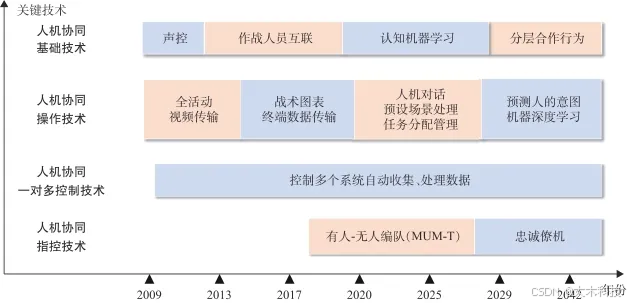
图4 人机协同技术发展脉络
Fig.4 The development of human-machine collaboration technology
2.4 通信技术
所有无人系统共同面临的关键通信挑战包括:通信链的可用性、通信链支持的数据量、频谱分配、射频子系统对于电磁干扰的韧性等[16]。当较高密度的无人系统在相对小的区域内作战时,会增加本地数据传输需求,对机载系统和地面/水面控制系统而言,尺寸、重量、功率及冷却性能是许多平台的限制因素。针对大型无人系统,必须缩短与数字系统有关的恢复时间。通信技术的发展脉络如图5所示。通信技术发展的关键技术包括发射器/接收器系统设计,预处理、压缩处理、数据加密等信号处理技术,水下通信,抗干扰光学通信等。目前,高增益、坚固耐用、成本更低的多向天线是无人机通用的通信设备,大型无人机也可考虑使用高聚束微波,合成孔径天线和相控阵天线是发展趋势。此外,砷化镓(GaA)、氮化镓(GaN)固态功率放大器也正在研制中。
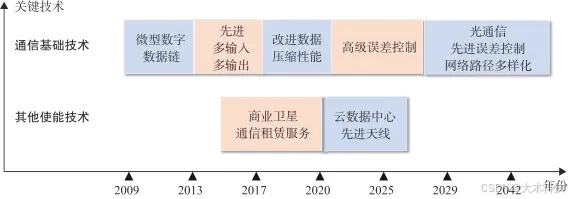
图5 通信技术发展脉络
Fig.5 The development of communication technology
2.5 网络安全技术
为了使无人系统有效运行,网络安全系统必须保持敏感信息的完整性、可用性和机密性。特别在当今环境下,许多无人系统的关键任务能力都依赖于信息技术,因此管理此技术并确保信息的机密性、完整性、可靠性、可扩展性和可用性的能力至关重要[17]。其关键技术为数据加密技术和网络防御技术,体现在网络运行安全、信息保障安全和电磁频谱与电子战方面,如图6所示。截至2017年,美军尚无专门的无人系统信息保障安全解决方案,短期内亟待解决;从中长期来看,随着多无人系统的使用,迫切需要改进政策、程序与技术,保障信息基础设施安全,并保持敏感信息的完整性、可用性和机密性。

图6 网络安全技术发展脉络
Fig.6 The development of network security technology
2.6 动力与能源技术
随着空中、地面与海上任务对无人系统的发展与装备需求的显著增长,要求无人系统的推进与动力系统的后勤保障方案满足更加有效、功能更强、更加便携的需求[15]。无人系统应用了各式各样的推进系统,包括重质燃料或汽油驱动的内燃机、喷气发动机、动力系统、燃料电池、太阳能以及混合动力系统,如图7所示。根据平台大小和任务要求的不同,这些推进系统可以分为三组:涡轮发动机、内燃机和电机[15]。涡轮发动机动力系统采用涡轮增压技术,燃料燃烧具有高功率、高效率的优势以满足高速、长距离、大载荷等复杂飞行任务的需求。内燃机动力系统在汽缸内混合燃料和空气,通过点火或压燃方式使混合物燃烧,进而推动活塞运动,产生动力,具有输出功率大、续航能力强的优势,适用于低速、长飞行时间的任务需求。电机动力系统中电机通过电能驱动电磁场旋转,进而带动无人机推进系统工作,具有环保、节能、噪音低的特点,适用于高速、短飞行时间的任务需求。目前,以固态氧化物燃料电池作为主要能源的无人平台具有灵活以及噪音低等特点。与其它燃料电池相比,固态氧化物燃料电池的热力环境和传导机制为燃料裕度留有相当大的改进余地。高效小尺寸推进系统涵盖了整个 45~1000 kg磅范围的无人平台推进系统技术,并有望具有全新的系统性能。而嵌入式高效涡轮发动机采用高效燃油、亚音速推进发动机技术,将进气和排气装置合并为复合式结构,支持未来对续航性和航程的极端要求。
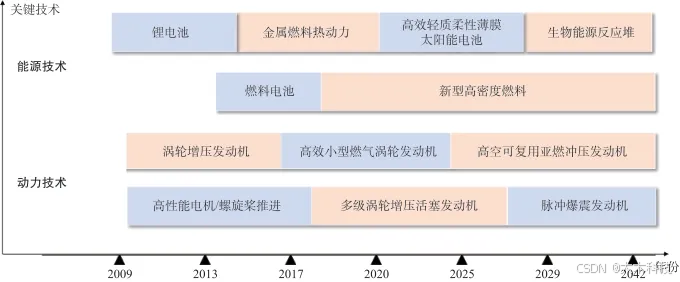
图7 动力与能源技术发展脉络
Fig.7 The development of power and energy technology
2.7 载荷技术
在作战空间中,作为武器运载平台的无人系统得到了越来越广泛的使用,在无人系统的集成中是至关重要的一步。在作战条件和威胁条件区别明显的情况下,使用无人系统,而非有人平台是更优选择[16]。从类型和尺寸选择上看,无人系统比有人系统多。从续航时间上看,无人系统比有人系统长。无人系统也具有支持许多不同任务的潜力,如图8所示。目前,各军兵种的实验室和国家实验室正在进行大量以先进武器材料、无人机系统武器及纳米能量武器为代表的载荷技术研究。聚合物、金属、陶瓷、复合材料和仿生材料等新型材料逐渐被应用于无人机系统载荷设计,以便减小体积、重量、功耗与成本和提高安全性与抗毁性。
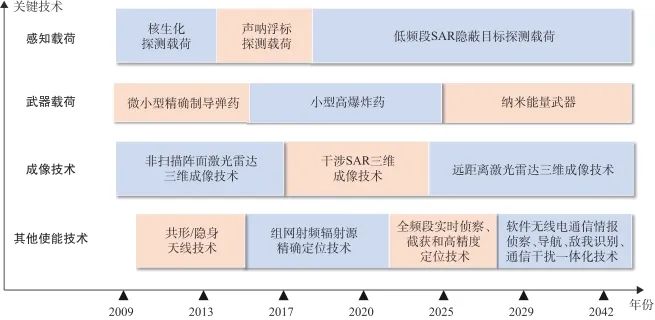
图8 载荷技术发展脉络
Fig.8 The development of load technology
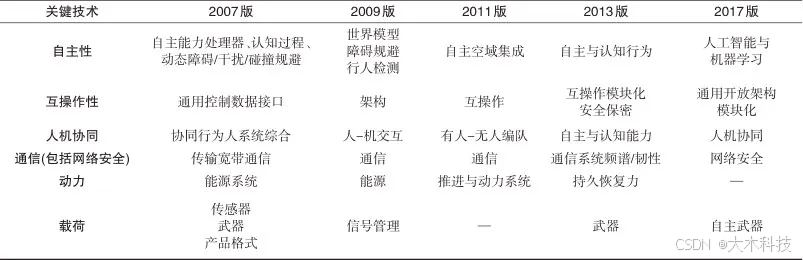
表2 各版路线图中无人系统技术发展规划
Table 2 Development plans for unmanned system technology in various roadmaps
针对美国各版无人系统发展路线图所规划未来10至25年间无人系统所面临的关键技术挑战,通过综合各版路线图对无人系统技术的发展规划,总结出其中无人系统领域的关键技术发展规划,如表2所示。
3 美无人系统技术发展现状分析
通过对美军无人系统发展路线图和技术体系分析,将无人系统技术体系归纳为自主、互操作、协同、通信(包括网络安全)、平台与动力等关键技术领域,考虑到无人系统使用过程中的反制防护问题,将无人系统反制技术也作为重点研究方向。
3.1 自主技术
一是复杂环境感知与认知技术,包括导航感知、任务感知、系统健康感知以及操作感知四个主要领域[18]。2020年11月,“维斯普”签订合同,为空军特种作战司令部、空军安全部队中心开发一种新型低成本感官增强情报、监视和侦察无人机,该无人机的远程操作能力可以提高美国空军在态势感知、团队监督和装备监控方面的效率。同年12月,美国国防高级研究计划局公开了“复杂环境中弹性和自主机器人”项目,该项目致力于开发机器自主感知算法,使无人驾驶地面车辆在最少干预下能够在开阔和复杂的地形上高速行驶。2022年12月,美国国防创新小组联合陆军发起地面车辆自主路径项目,基于商用无人驾驶技术开发一个软件原型,整合多个传感器数据并构建远程控制界面,可持续感测路面复杂信息,为地面无人车辆提供导航。
二是高适应可信自主控制技术。目前,美国开展了大量的无人机自主控制技术相关的项目,涵盖了态势感知、意外事件处理、任务分配与重规划、自主决策等诸多方面。2022年2月,XTEND推出了具有室内室外导航功能和无人机协同技术的下一代战术小型无人机系统,该新型系统采用以人为中心的“Skylord”操作系统,搭配先进的VR/AR技术、人工智能和机器学习飞行算法并融合边缘计算功能,实时更新规划任务,使无人机能够在任何环境中轻松飞行。同年9月,复仇者MQ-20A无人机通过部署在开放任务系统软件堆栈上的AI飞行员成功实现完全自主飞行;此次飞行使用了新颖的强化学习架构,可以在动态和不确定的现实世界环境中做出决策,对飞行路径进行实时更新,以避免对手使用实时融合轨迹,从而在“追逐与躲避”的动态博弈中取得优势。
三是实时感知规避技术。2022年3月,美国海军陆战队与澳大利亚Senient视觉系统公司签署了一份无人机海上视觉探测和测距系统合同,该系统使用基于人工智能与深度学习的感知技术,通过红外或光电传感器对传统雷达难以探测到的图像流中的目标进行自动检测、定位、跟踪和分类,可用于高空远程无人机系统执行情报、监视和侦察任务,在两栖作战期间收集情报并增强态势感知能力。同年8月,美国海军空战中心飞机部进行了名为“Guardian探测回避系统”的首次飞行测试,该系统能够为导航和交通规避机动提供视觉提示和避让机动建议,通过地面传感器与地面控制站的飞行器操作员通信,有效帮助操作员避免碰撞,提高空域安全性。2023年2月,美国国防高级研究计划局与陆军共同测试了一款新型战场空域感知软件。该软件能在短时间内自主规划复杂航线,避开潜在冲突空域,通过实时感知与时空协调实现快速战术执行。
3.2 互操作技术
美国在系统架构和互操作等方面都开展了大量的理论和实验研究,无论是广度还是深度都达到了较高的水平,并且逐步推动其走向实际作战应用[19]。
一是重视体系建设和系统集成。美国重视标准化和通用化,要求系统符合北约标准 [20],在此基础上实现协同体系框架的软件开放化、接口标准规范化、控制自动化和界面简明化。2020年6月,美军联合反小型无人机系统办公室批准了各军种能够购买的7个反无人机系统和1个通用指挥控制标准架构,提高了指挥控制标准的通用性和灵活性,克服了不同军种因购买多种不兼容反无人机系统而无法合作的弊端。2022年2月,Spectranetix公司为美海军研发了模块化开放式标准套件/基于传感器开放式系统架构节点的边缘韧性组网和电子战编排,该系统旨在满足开放式系统标准、提供安全性和可快速重构架构的特性,使系统设计者能够根据新的任务和应用需求进行快速动态更新,加快美国海军实现赋能动态作战。2023年4月,美国国防部批准诺斯罗普·格鲁曼公司全速生产综合作战指挥系统。该系统具备先进的全域指挥与控制能力,采用敏捷软件开发框架,能快速优化网络集成传感器和效应器功能,实现联军高水平互操作性和网络集成。
二是逐步提升控制层级和互操作性。互操作技术反映多个无人系统在执行任务时协同行动的能力,为了改进无人系统之间的协同作战和系统集成能力,美国国防部针对如何改进无人机系统互操作的问题已开展了大量研究。为掌控未来数字战场上的主动权,2021年4月,美国国防部提出地面层系统计划,通过探测、识别、定位、利用和破坏敌人感兴趣的信号,为美国陆军提供关键的态势感知能力。该系统的设计符合国防部的C4ISR/EW模块化开放式标准套件,可以跨机载和地面平台应用最新的硬件和软件技术以实现最佳互操作性。同年美国陆军司令部完成了与英、法部队的旨在提高互操作性的“勇士21-4”联合演习;次年美国陆军组织超过23个国防部组织,包括陆军的几个项目执行办公室、ISR(即Intelligence, Surveillance, Reconnaissance)任务组和人工智能集成中心,以及7个国际盟友(意大利、德国、荷兰、澳大利亚、法国、加拿大和英国)开展了“2022年度实验性演示验证网关演习”,测试了互操作性。2022年6月,美国海军陆战队司令和分管航空部队的副司令相继签署《陆战队部队设计2030》和《2022年美陆战队航空计划》,提出将重点建设数字互操作性。美海军陆战队还将成立信息战司令部,整合太空和网络领域信息力量,以便进一步开发数字互操作性的战场潜能。
3.3 协同技术
一是智能化作战控制技术。2021年12月,美国海军启动“SCOUT实验”项目,重点研究专用于目标识别的机器深度学习算法、自然语言处理工具、传感器融合技术和决策辅助工具(预测人的意图)等,旨在开发和整合自动化和人工智能技术,帮助作战人员剖析作战问题,简化流程并减轻作战人员负担,加快决策速度,从而降低作战管理难度[21]。2022年12月,General Atomics在最近的演示中实现MQ-20 Avenger无人机和Sabreliner公务机同时对两架F-5 Advanced Tiger战斗机的追踪配对;其中配置有战术红外搜索和跟踪传感器的F-5执行多平台红外感应,并通过战术瞄准网络技术与MQ-20进行数字连接,共享传感器观测结果;此次飞行展示了MQ-20、Sabreliner公务机和F-5战斗机之间的有人-无人编队协同。2023年,通用原子航空系统公司成功将人工智能应用于开放任务系统,推动协同作战飞机生态系统的发展,并展示了成熟的无人机协同作战技术。同年,公司进行了现场战术演习,利用AI飞行员操控MQ-20复仇者无人机,通过低轨道卫星通信实现人机高效协同。
二是有人-无人协同系统技术。当前世界主要军事强国都在大力加强无人系统和有人系统协同作战系统的验证,考虑有人系统和无人系统的联合作战编组。2022年7月举行的“环太平洋2022”军演中,美海军出动了4艘无人水面艇(海军2艘“幽灵舰队霸王”测试船——“牧羊人”和“流浪者”,以及“海上猎人”和“海鹰”无人水面艇),与驱逐舰等有人平台协同作战,验证有人-无人组队概念。2022年12月,空客组织开展了“未来空战系统”有人-无人编队演示机的大规模多域飞行演习,期间2架战斗机、1架直升机和5架远程载机协同完成了一项复杂任务。2023年4月,美国海军直升机海上打击中队与通用原子航空系统公司合作进行反潜演习,利用“海洋卫士”和MH-60海鹰直升机实现有人-无人协同反潜技术。
三是无人集群系统技术。无人系统集群正在改变战场制胜机理,成为“非核遏制”的重要战略手段。2022年4月至5月期间,美国陆军组织开展了“2022年度实验性演示验证网关演习”行动,这是迄今为止规模最大的网络化“交互式”无人机蜂群作战飞行试验。在演习中,美国陆军第82空降师的士兵们发射了总共28架“空射效应”无人机,分4波发射,每波7架;每波无人机都可看作一个蜂群,由一名飞行员在地面执行控制蜂群的任务。这28架无人机组成的蜂群模拟了美国陆军所谓的“刺激、猎杀和评估战术”,被称为“狼群”;其中第一波蜂群在空中进行侦察,探测并报告潜在的威胁,第二波蜂群对敌人威胁系统进行电子干扰压制,第三波蜂群具备动能杀伤力,可以通过远距离射击摧毁目标,第四波蜂群执行战损评估。“狼群”的这种分层能力将为指挥官提供实时决策,在掌控战场局势发展的同时减少人员伤害,凭借其广泛的发射平台,将作为“未来攻击侦察机”生态系统的前沿要素部署在预期与敌人接触的地区。
3.4 通信技术
一是高速通用数据链技术。高速通用数据技术实现了无人平台感知信息即时回传,并支持异构平台的感知情报信息分享。目前美国研制了针对情报、监视和侦察用途的点对点通信协议,定义了S、C、X、Ku、Ka波段终端,传输速率可高达百兆[13]。2022年9月,Lockheed Martin和Verizon演示了支持5G的无人机通过5G网络传输数据并加以分析,实现对军事目标的地理定位。2022年12月,通用原子航空系统公司在25.5 h内完成了MQ-9A无人机极地飞行7323 km的飞行测试,通过使用Inmarsat的L波段机载ISR服务在北纬78.31°执行巡航并飞越加拿大北极地区的黑格托马斯岛,充分显示了其ISR操作的有效性和无人机在高纬度地区运行的可行性。2023年2月,通用原子航空系统公司在MQ-9A上进行了低轨道卫星通信测试,该测试不仅扩大了飞行范围,覆盖至南极和北极,还提高了数据传输效率,显著减少了通信延迟。
二是抗干扰抗截获抗欺骗技术。复杂战场中无人系统数据链在提高常规抗干扰能力的同时,需要增强反欺骗和网络抗干扰能力,提升无人系统在复杂战场电磁环境下的适应性。2022年6月,美国DeltaQuad公司采用垂直起降无人机测试了先进的抗干扰GPS系统,获得令人满意的成绩。在测试过程中,无人机同时装备了增强GPS系统与标准GPS系统,以自主模式飞行,与大功率军用干扰系统进行对抗;当无人机进入GPS干扰区域时,标准GPS很快失去定位能力,而增强GPS系统即使在近距离飞近干扰系统时,也能保持良好卫星连接。2023年7月,美国太空系统司令部发布征询通知书,计划整合新兴威胁至通信对抗系统。该系统是陆基反卫星通信系统,可拒止、干扰和欺骗对手卫星通信,其架构灵活,可应对不断发展的威胁。
三是自适应组网技术。2022年11月,洛克希德·马丁公司开展新型通信技术研究,旨在发展一种更先进、灵活的人工智能组网技术,以提升F-35战斗机与“急速车手”空射无人机的协同水平。“急速车手”空射无人机外形类似空射巡航导弹,是一款基于“数字工程集成”技术的概念机,可由运输机搭载升空并放飞,通过机上发动机提供的动力继续飞行,因此具有低成本和可消耗的优点,还可搭载不同载荷实现多功能任务。目前,洛克希德·马丁公司正在对“急速车手”无人机进行测试,并计划展示其与F-35战斗机的编组建网情况,2024年,该公司的“卡雷拉”计划将参与美国空军的“协同战机”项目竞标。2023年8月,美国空军研究实验室公告称,将研发空中通信网络项目,涉及软硬件开发、模型验证及硬件测试,旨在利用自组网技术为高性能战斗机提供数据语音链路。
四是基于无线认知的智能通信技术。基于无线评估智能感知和频谱资源智能决策与管理技术,使无人平台具备电磁频谱感知、通信参数自适应和网络拓扑智能重构能力,可以较大程度优化网络资源。为了使侦察和攻击无人机在电子干扰、通信降级以及其他恶劣环境中执行任务时可编队协同工作,2019年2月,美军针对“拒止环境中的协同作战”项目开展了集成验证,成功实现了在通信受限条件下6架真实RQ-23虎鲨无人机和14架虚拟无人机的目标任务[21]。2021年4月,美国陆军作战能力发展司令部下属陆军研究实验室和内布拉斯加大学的研究人员合作开发了一种名为“形状A”的新技术,该技术基于几何学对潜在冲突区域进行集成预测,在通信约束下改善多机器人信息收集能力,同时处理机器人之间的间歇性通信损失,提升整体工作效率,使战场上的机器人在通信不畅时保持通信弹性。2023年5月,美国Skydio公司发布了新型无人机Skydio X2,它采用先进的多频段技术,可应对频段干扰和带宽限制,适合全球范围内的情报侦察、态势感知及紧急救援任务。
五是信息安全技术。无人系统信息安全主要包括物理层安全和信息层安全[16]。2019年8月,美国国防高级研究计划局发布了网络物理系统的共生设计计划[17];该计划的目标是开发一种基于人工智能的方法,将军事网络物理系统设计所需的时间从数年缩短至数月并加强设计创新。2021年10月,莱昂纳多公司推出一种基于嵌入式和可扩展的聚合计算可靠定位导航和授时系统,可应对GPS威胁并提升作战网络能力。2022年5月,美国佛罗里达大西洋大学团队、量子技术公司Qubitekk以及美国国防承包商和信息技术服务提供商L3Harris展开合作,为美国空军开发首个基于无人机的移动量子通信网络。该通信网络用于共享量子加密信息,包括一个地面站、无人机、激光器和光纤,使无人机能够无缝穿行在建筑物、恶劣天气及地形之间,并迅速适应不断变化的战争环境。2023年1月,诺斯罗普·格鲁曼公司集成了战术数据链与5G网络等,以传输ISR数据,为构建数字作战网络和多域作战提供支持。
3.5 平台与动力
一是新概念无人平台技术。目前对新概念无人平台技术的研究重点集中在跨介质飞行器、临近空间无人驻空平台、航母舰载平台、高超声速无人系统等。
2016年,华盛顿计算物理及流体动力学实验室和海军科学研究实验所将仿生鱼鳍融入到固定翼飞行器,研发出一种跨介质飞行器Flying-Swimmer。2021年8月,美海军授予Skydweller航空公司一份500万美元的太阳能无人机演示验证合同,于2022年第2季度前完成系列演示。2021年9月,空客“西风”太阳能无人机完成年内最后一次试飞活动,使其在平流层总飞行时间达2435 h,并创造了23195 m的同类无人机绝对飞行高度纪录,同时保持着此前创造的25 d 23 h 57 min空中不加油续航纪录;此次飞行验证了基于5G的数据传输能力、在2 GHz频谱下使用高空伪卫星提供数据服务的可行性,测试了450 MHz窄波段下长达140 km的通信连接能力以及平流层精确机动和位置保持等多项控制能力[6]。2022年1月,Lighter Than Air Systems公司和Drone Aviation公司获得了美国政府的多单元分包小型战术浮空器平台合同;小型战术浮空器平台是一种具有高度战术性和移动性的浮空器系统,可在高达500 m的空中运行,用于扩展情报、监视和侦察,并在环境偏远恶劣地区保护通信安全;该系统还可以进行快速配置,定制有效载荷,以支持长达数天、数周或数月的各种任务需求。2022年美菲“肩并肩”联合演习期间,美军在菲律宾放飞部署了4艘高空飞艇,均起飞于菲律宾克拉克基地,每艘飞艇的活动周期为1周左右,在南海和菲律宾海开展侦察,为演习提供情报。
在航母无人机和高超声速飞行器方面,2021年12月,美国海军和波音公司在“乔治·布什”号航空母舰上完成了MQ-25A无人机的首次航母甲板调度测试,主要检验了MQ-25A无人机与航母各系统的兼容性与协调性[7]。2022年1月,美国波音公司在美国航空航天学会会议上以模型的方式公布了其“瓦尔基里”可重复使用无人驾驶高超声速飞机的最新概念和新模型的照片,该款高超声速飞机将可能用于执行军事和商业任务,包括作为太空发射的载机。
二是地面无人作战平台技术。美国地面无人作战平台行动系统的技术研究和产品研究方面优势比较明显,无论在机构结构设计方面还是仿真运动机理、控制技术方面都有较深入的研究。
2021年1月,机器人技术与自主系统开发商米勒姆机器人公司所研发的中级X型机器人战车已通过初始的机动测试,将成为主战坦克以及步兵战车的智能僚机,能够执行危险任务并去往不同的阵地,缓解战场伤亡情况[9]。2022年2月,在西弗吉尼亚州道森营举行的山地作战训练中,美海军陆战队第2团第1营装备了全新的6x6轮式“猎人狼”无人地面车辆参加了训练,该无人车可实现“静音”模式下的静态位置移动或操作;可配置执行扫雷、有限的战场工程作业、直接/间接火力支援以及其他任务;也可装配一架充当通信中继节点的四旋翼无人机实现监视和侦察,提供局部态势感知。2022年9月,美国海军陆战队作战实验室授予战斧机器人公司“自主和机器人增强的多域步兵班”项目的合同,该项目旨在为美国海军陆战队的无人化能力开发一个完全集成的通用控制和通信平台,实现集中式机器人控制传统记录系统、下一代无人系统和卸载有效载荷的互操作性,显著提高步兵部队的态势感知能力、任务成功率和杀伤力,帮助其更好应对未来战场挑战。2024年1月,美国陆军成功进行了机动火力综合实验,采用先进多层机动部队保护系统对抗模拟敌方无人机,该系统可自主管理近程防空能力,消除各种空中威胁。
三是水面无人系统技术。美国对无人水面探测/打击系统给予了高度的重视,已完成遥控猎雷系统 “海狐”和“斯巴达侦察兵”等多种型号的研制及列装,并于2010年启动了“反潜战持续跟踪无人水面艇”研制计划[10]。随着“分布式作战”概念的提出以及美军兵力结构的调整,美国海军大力推进大中型水面无人舰艇研建,多个相关项目相继启动。2017年,美国国防部战略能力办公室提出了实施“幽灵舰队霸主”无人水面舰计划,其内容是发展大中型无人舰艇[11]。2019年8月,美国海军正式发布了关于大型无人水面艇的指标方案,将下一代大型无人船的船体长度界定为61~91 m,排水量最大可以达到2000 t。2020年,美海军相继启动“海上列车”项目和“无人值守舰船”项目,全力发展大型无人水面舰艇。2021年9月,美国国防部发布了“游骑兵”大型无人艇成功试射“标准”-6远程舰空导弹的视频,在一定程度上验证了无人平台通过使用通用能力较强的导弹,开始具备防空、反导、反舰和打击陆地目标的多用途作战能力。2022年4月,美国海军部长批准发布了“2023财年美国海军长期造舰计划”,根据计划,到2045年,美海军将拥有81~153艘大型水面无人舰和18~50艘大型水下无人艇[12]。各种迹象显示,美国海军对无人作战系统的巨大潜力寄予厚望,其未来走向值得长期关注。
四是无人系统动力技术。无人平台动力来源包括热动力发动机驱动、纯电驱动、混合动力驱动以及液压和气压驱动等。混合驱动技术以其较高的能量转换效率、较好的隐身特性等成为各个主要无人平台的动力首选。从发展趋势上来看,随着燃料电池技术等新一代的技术运用,纯电驱动的续航里程将会大大延长,纯电驱动技术将会成为车辆驱动技术的主流。
2020年11月,美国Galvion公司锂离子电池进入小批量试生产阶段。该电池采用了一种独特的、具有突破性的混合锂化学材料,可以延长循环寿命和环保性能;采用专用智能内部电池管理系统,可在不安全条件下自动停机和自动平衡,显著增强了性能并提高了效率,可为军用车辆提供最新、最先进的技术并显著降低全寿命周期成本。2022年11月,美国高超声速飞机制造商Hermeus公司公布了Chimera发动机的测试视频,该发动机可在涡轮喷气发动机和冲压发动机两种工作模式中切换,为其第一架高超声速飞机提供动力。2024年2月,美国WaveAerospace公司推出“女猎手”混合动力无人机,最高速度Ma=0.7,续航2 h。其混合动力系统包括涡轮喷气发动机和电动推进风扇,有效载荷50 kg,最大起飞重量165 kg。该无人机可从不同平台发射,适应强风环境,具备反向推力,可自主着陆。
3.6 载荷技术
任务载荷是无人系统的重要组成部分,决定了无人系统的任务能力。主要可分为侦察监视、武器弹药、电子对抗、通信中继等类型,服务于无人系统“探测-识别-跟踪-打击-效果评估”等主要作战环节。其中,侦察监视载荷主要有成像载荷、地形测绘、气象探测、水文探测、核生化探测等载荷;武器弹药载荷主要包括各型机载/车载/舰载/艇载炸弹和导弹等;电子对抗载荷主要包括电子侦察、电子干扰、电子防护、电子攻击等载荷。目前,侦察监视载荷主要采用双自由度的光电吊舱,并向360°万向节发展。武器弹药要实现小型化,隐身无人平台还要求实现内埋,如“死神”无人机的机载武器(1360 kg)主要包括2枚GBU-12激光制导炸弹、4枚AGM-114“海尔法”空地导弹、227 kg“联合直接攻击弹药”以及小直径炸弹等。
2021年12月,通用原子公司曾推出“莫哈韦”察打一体无人机验证机,该机以一台涡桨发动机为动力,任务载荷重量1633 kg,最多可携带16枚AGM-114导弹,除了配装MQ-9“死神”和MQ-1“灰鹰”无人机的航电系统和飞控系统外,还装载了光电/红外吊舱、合成孔径雷达、地面移动目标指示器和信号情报处理器等设备。2022年4月,波音公司为美国海军建造的“虎鲸”超大型无人潜航器成功携带10 m大型有效载荷模块完成秘密部署水雷以及投送其它载荷的任务,其采用开放式体系结构和模块化设计,核心部分将提供制导和控制、导航、自主、态势感知、通信、功率分配、推进和机动能力[19]。2023年8月,美国Archer公司完成首架具备电动垂直起降能力的午夜飞机制造,并与美国空军签约1.42亿美元的合同。该飞机可承载约450 kg有效载荷,具有专有电动系统和低噪音特点,有望提升作战反应速度和敏捷性,未来可高效执行运输、后勤等任务。
3.7 反制技术
无人系统仍需由作战指挥节点通过无线通信方式发布作战指令,同时无人系统通过多种平台搭载不同类型的载荷,可承担情报收集、监视跟踪、电子对抗、火力引导、火力打击等多种任务,无人系统反制技术主要针对无人系统任务载荷失效、无人系统通信干扰与导航干扰、无人系统平台毁伤以及反制蜂群类无人系统作战模式等方面。无人系统通信与导航干扰是美国无人系统反制的主要手段。无人系统平台毁伤采用动能拦截、高能破坏等方式。反制集群无人系统作战中,由于蜂群无人系统部署密度大、组网通信依赖过多、攻击速度受限,各国研发了多种反制无人机集群的技术手段。
2022年1月,雷声公司发布视频展示了基于4×4 M-ATV和固定托盘式发射系统发射的Block 2+“郊狼”无人机,可以在不同高度击溃各种固定翼无人机。2022年3月,美国空军研究实验室选择莱多斯公司开发并建造新型高功率微波武器系统“雷神之锤”,具备抵御集群攻击的战力。2022年10月,Epirus等公司推出集成有高功率微波反无人机技术的装甲车Stryker Leonidas,在试验中成功地摧毁了单个无人机目标和成群的无人机,能抵御无人机群和其他电子威胁。2022年11月,诺斯罗普·格鲁曼公司的短程反无人机指挥与控制系统在尤马成功完成了迄今为止最复杂的系统测试,前沿区域防空指挥与控制新系统作为所有反无人机装备的指挥控制系统,在实弹射击试验中能够检测和拦截各种武器;未来其开放、多域系统体系架构可与传感器、效应器和警告系统集成,以启动快速、实时的防御来抵御短程机动威胁。2023年12月,美国海军陆战队在亚利桑那州尤马实验场成功完成了海军陆战队防空综合系统的集成测试,验证了其反无人机能力,标志着海军陆战队防空能力取得重大进步。
4 无人系统技术发展趋势
随着无人系统装备实战化发展、科学技术特别是人工智能技术的发展,综合国内外无人系统装备与技术发展及其作战应用情况,可知无人系统技术呈现出体系化、智能化、高能化三大发展趋势(如图9所示)。这是基于对美国国防部八版无人机/无人系统路线图的规划的分析(包括互操作性、自主性、人机协同、通信、网络安全、动力与能源、载荷等主要技术方向的关键能力和规划脉络)并结合目前发展现状,高度概括凝练研判形成。其中体系化包含了互操作性技术、通信技术和网络安全技术;智能化对应自主性技术和人机协同技术,高能化对应能源与动力技术以及载荷技术。
图9 无人系统技术的体系化、智能化和高能化发展趋势
Fig.9 The development trends of systematization, intelligence, and high-capability in unmanned system technology
4.1 体系化
为发挥整体作战效能、提升体系在对抗条件下联合作战能力,需要统筹空中、地面、水面、水下各域无人系统装备发展,在功能和效能上与有人装备体系形成优势互补,实现无人系统技术的体系化发展。无人系统体系化发展可以借鉴美国国防部路线图中关于互操作、通信和网络安全部分的发展规划。
美军重视体系建设和系统集成,强调标准化和通用化,要求采用标准体系架构、符合北约标准的传感器和无人机控制指令,在此基础上实现协同体系框架的软件开放化、接口标准规范化、控制自动化和界面简明化[22]。
未来战争是整个作战体系的对抗,是以信息互通、系统集成为重点的“网络中心战”[18],无人系统需要融入有人作战体系,提高各域无人平台之间以及与有人系统之间的信息传输和综合应用能力,实现平台间的互操作[22]。近年来,美军逐步提升无人系统的控制层级和互操作性,互操作技术反映多个无人系统在执行任务时协同行动的能力。同时,美军重视无人机与有人机、无人机与无人机的协同运用能力,大力发展无人僚机、无人蜂群、空射诱饵、无人加油机等新质装备,构建具有集群化、分布式特征的空中作战体系,实现有人作战装备的能力倍增。
4.2 智能化
无人系统的智能化发展趋势日趋明显,在作者之前发表的文献[21]中,从单无人系统的智能化(认知智能)、无人集群系统的智能化(群体智能)和有人-无人协同系统的智能化(混合智能)三个方面对智能化趋势进行了详细分析和阐述。无人系统智能化发展可以借鉴美国国防部路线图中关于自主性和协同的发展规划。
单体无人系统的智能化是无人系统和认知智能技术相结合,以提高“观察-判断-决策-行动”自主化水平,使无人系统具有更加智能的感知、决策、规划和控制能力 [21]。无人集群系统的智能化是无人系统与群体智能技术相结合,来实现无人集群的数量优势和协同效能,大量无人平台以集中/分布方式,使各平台“在正确时间、到达正确地点、执行正确任务”,获得“1+1>2”的协同效能 [21]。有人-无人协同系统的智能化是通过混合智能实现有人系统和无人系统的高效协同,实现无人与有人系统优势互补,推动无人系统融入联合作战体系[21]。
4.3 高能化
智能化作战将成为主流的作战样式,智能化作战的主要物质基础是无人系统[20]。无人系统人机分离,使得平台发展摆脱人的生理心理限制,可以追求更强的平台能力。高能化将成为无人系统追求的重要目标,以实现“到得远、藏得住、看得清、打得准”目标 [23]。无人系统的高能化主要包括两个方面:一是更强的平台能力;二是更先进的载荷能力。无人系统高能化发展可以参考美国国防部路线图中关于平台与动力、载荷的发展规划。
未来,无人作战平台能够通过多维度广泛感知外部环境与内部状态信息,基于感知数据实时自主完成深度挖掘、推理和融合,实现战场态势构建,自主产生控制策略并执行,同时具有一定的自主认知和学习能力[24]。无人作战平台能力更强,具有更先进的载荷能力,实现感知多源化、认知融合化、决策智能化、控制自主化、作战协同化、保障全局化,无人平台实现高能化发展。
5 结束语
本文深入分析了美国国防部八版无人机/无人系统路线图,将无人系统技术体系归纳为互操作性、自主性、人机协同、通信、网络安全、动力与能源、载荷等主要技术方向。并根据路线图内容和技术发展规划分析了各个技术方向的概念内涵和关键能力,绘制了各个技术方向的发展脉络图。综合发展路线图分析和无人系统发展情况,研判了无人系统技术呈现出体系化、智能化、高能化三大发展趋势,为我国无人系统技术体系发展提供些许借鉴。

















 1553
1553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









