







为综合考虑目标检测和目标分割的结果,会将检测框和掩码轮廓综合考虑进行逻辑判断,需要判断目标框与掩码是否相交。本文对目标框与轮廓是否相交、相交面积对比、输出相交面积最大的目标框索引等功能进行实现,并对实现过程模块化前后代码进行展示,以及添加相应效果帮助大家理解和使用。最后把功能模块化,方便复用和调用。
模块化前
功能实现步骤
步骤1:读取图像,对图像进行二值化,并找出图像中的所有轮廓。
步骤2:判断轮廓大小,找出最大轮廓。
步骤3:定义目标框,格式(x1, y2, x2, y2),其中(x1, y1)是左上角的坐标,(x2,y2)是右下角坐标。
步骤4:把每个目标框的掩码画出来,中间区域填充。
步骤5:判断轮廓掩码与目标框掩码是否相交。
步骤6:若相交,则计算相交部分的轮廓和面积。
步骤7:判断相交面积与上一个相交面积的大小,保存最大面积和最大面积的目标框索引。
步骤8:若有多个目标框,循环步骤4、步骤5和步骤6。
步骤9:输出最大面积和最大面积的目标框索引。
代码示例
代码
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 二值化图像以获取轮廓
_, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 查找轮廓
contours, _ = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 获取最大轮廓
if contours:
max_contour = max(contours, key=cv2.contourArea)
else:
print("No contours found in the image.")
exit()
# 定义目标框列表(矩形框的左上角和右下角坐标)
# 定义目标框列表
bounding_boxes = [
(571, 576, 902, 1017), # 示例目标框1
(527, 317, 713, 395),
(146, 211, 226, 359),
(764, 77, 1122, 700),
# ... 可以添加更多目标框
]
# 初始化最大相交面积和目标框索引
max_intersection_area = 0
max_intersection_box_index = None
# 遍历每个目标框
for i, (x1, y1, x2, y2) in enumerate(bounding_boxes):
# 创建一个与原图大小相同的空白图像,用于绘制目标框
box_mask = np.zeros_like(thresh)
# 在空白图像上绘制目标框
cv2.rectangle(box_mask, (x1, y1), (x2, y2), 255, thickness=-1)
name=str(i)+".jpg"
cv2.imwrite(name,box_mask)
# 计算轮廓与目标框的交集
intersection = cv2.bitwise_and(thresh, box_mask)
# 如果交集不为空,则计算交集面积
if np.any(intersection):
# 计算交集轮廓
intersection_contours, _ = cv2.findContours(intersection, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
if intersection_contours:
# 选择交集轮廓中的最大轮廓来计算面积
intersection_contour = max(intersection_contours, key=cv2.contourArea)
# 计算交集轮廓的边界框面积作为交集面积
x, y, w, h = cv2.boundingRect(intersection_contour)
intersection_area = w * h
# 更新最大相交面积和目标框索引
if intersection_area > max_intersection_area:
max_intersection_area = intersection_area
max_intersection_box_index = i
# 输出结果
if max_intersection_box_index is not None:
print(
f"The largest contour intersects with box {max_intersection_box_index} with the largest intersection area of {max_intersection_area}.")
else:
print("No bounding box intersects with the largest contour.")
请确保替换path_to_your_image.jpg为你的图像路径,并根据实际情况调整bounding_boxes列表中的目标框坐标。
这段代码首先读取图像并转换为灰度图像,然后进行二值化以得到轮廓。之后,它查找所有轮廓并选择面积最大的轮廓。然后,对于每个目标框,它创建一个掩码图像,其中目标框的区域被填充为白色,其余为黑色。接着,它计算轮廓掩码与目标框掩码的交集,并从这个交集中提取轮廓。最后,它计算交集轮廓的边界框面积作为交集面积,并更新最大相交面积和目标框索引。
注意,这个方法通过计算交集轮廓的边界框面积来近似表示交集面积,这可能不是最精确的方法,但它通常能够提供一个合理的近似值。如果需要更精确的相交面积计算,可能需要采用更复杂的几何计算或像素级别的比较。
效果图像
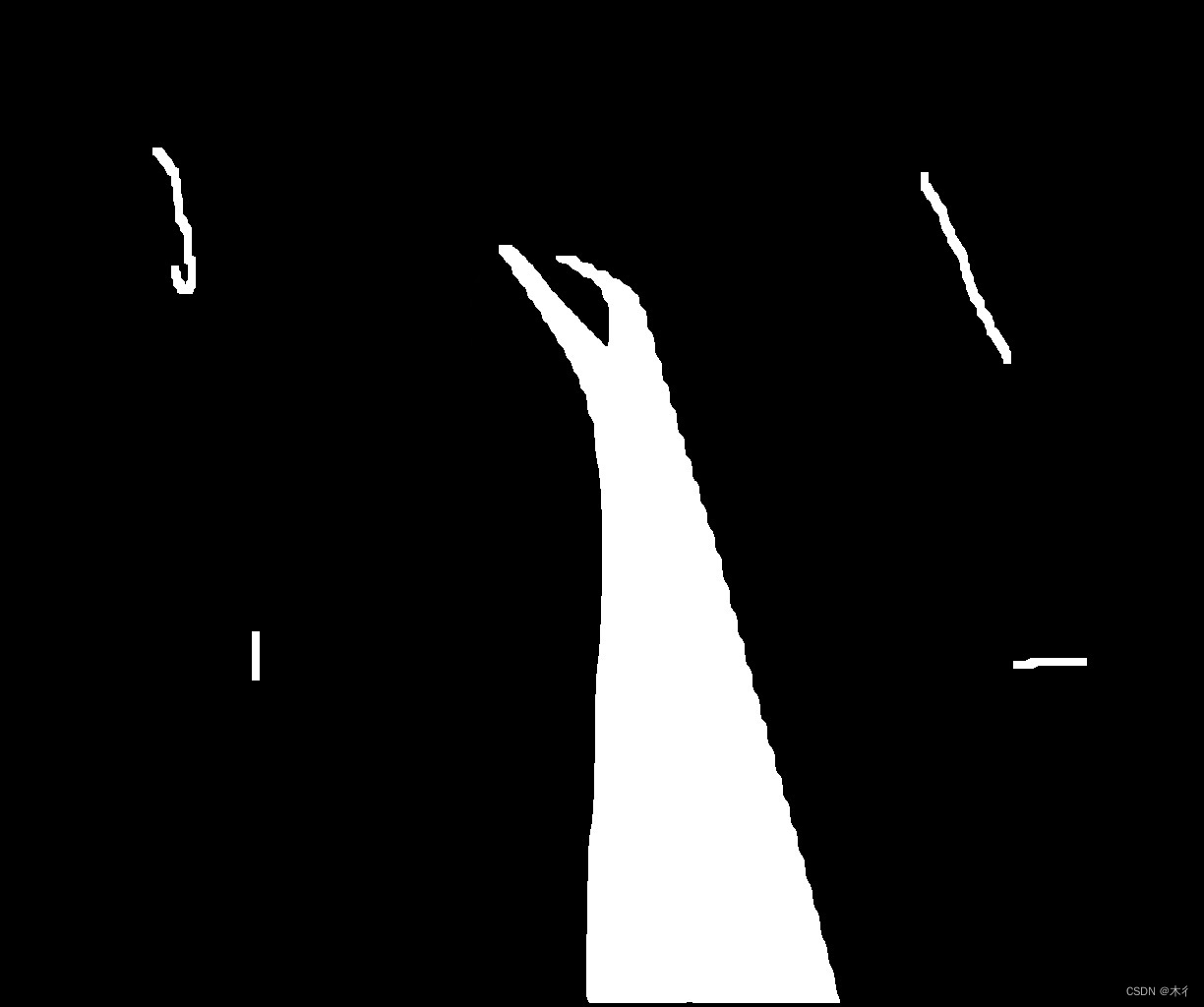
轮廓区域
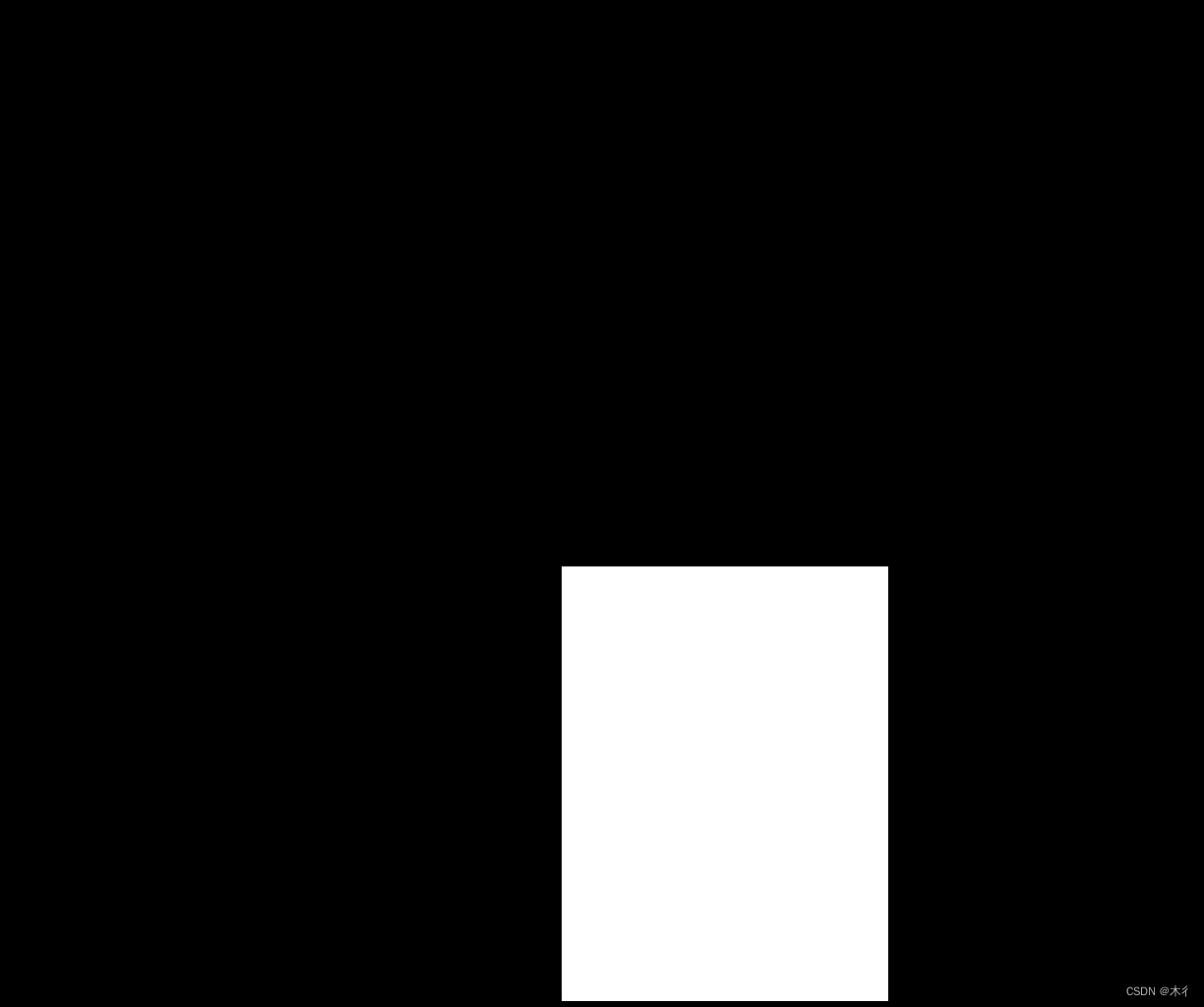
第一个目标框的掩码
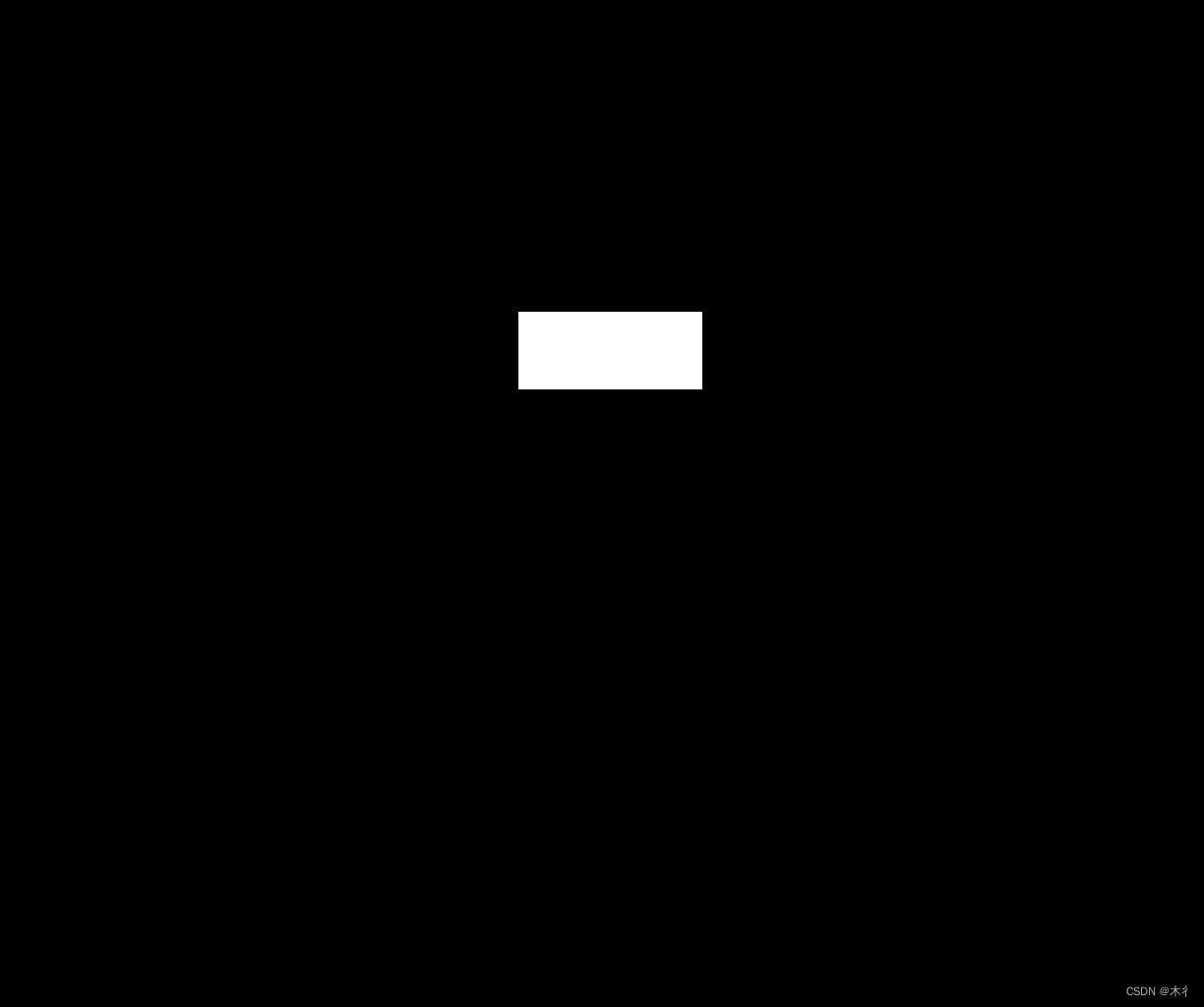
第二个目标框的掩码
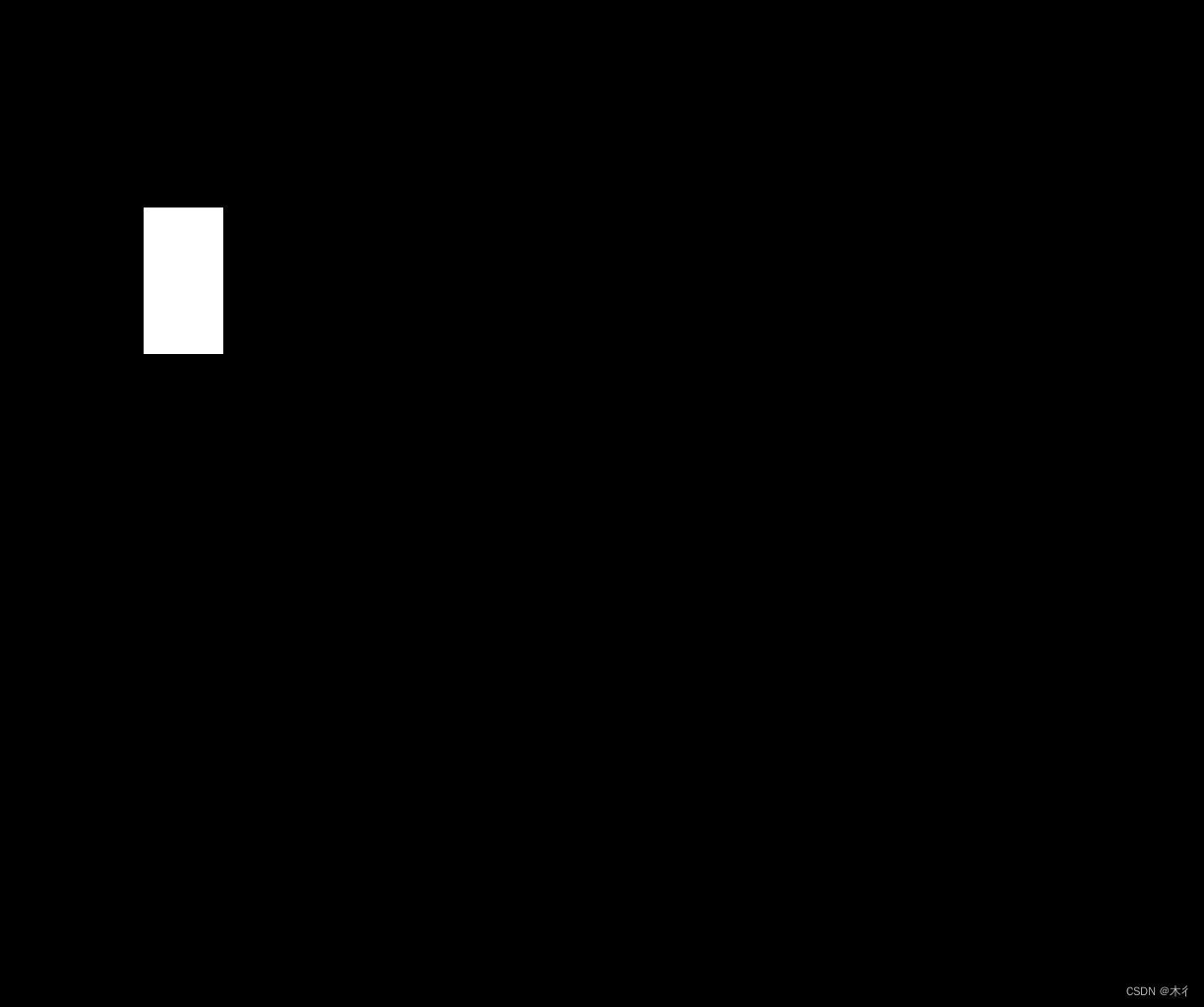
第三个目标框的掩码
第四个目标框的掩码
终端输出结果
The largest contour intersects with box 0 with the largest intersection area of 114036.
输出的索引的0,即第0个目标框与轮廓相交,且相交面积最大。
模块化后
功能实现
输入:目标框、轮廓、图像宽、图像高
输出:目标框索引或None
代码
name:B.py
##B.py
import cv2
import numpy as np
def calculate_max_intersection(contour, bounding_boxes, image_width, image_height):
# 创建一个空白图像用于计算交集,与原始图像同样大小,但全部为黑色
mask = np.zeros((image_height, image_width), dtype=np.uint8)
# 在空白图像上绘制轮廓
cv2.drawContours(mask, [contour], -1, 255, thickness=-1)
# 初始化最大相交面积和目标框索引
max_area = 0
max_box_index = None
# 计算每个目标框与轮廓的相交面积
for i, (x1, y1, x2, y2) in enumerate(bounding_boxes):
# 检查目标框是否在图像边界内
# 创建一个与目标框同样大小的掩码
box_mask = np.zeros_like(mask)
cv2.rectangle(box_mask, (x1, y1), (x2, y2), 255, thickness=-1)
# 计算轮廓掩码与目标框掩码的交集
intersection = cv2.bitwise_and(mask, box_mask)
# 计算交集区域的面积
intersection_area = cv2.countNonZero(intersection)
# 更新最大相交面积和目标框索引
if intersection_area > max_area:
max_area = intersection_area
max_box_index = i
if max_box_index is None:
return None
return max_box_index
name:A.py
##A.py
from B import calculate_max_intersection
import cv2
image = cv2.imread('image.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 二值化图像以获取轮廓
_, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 查找轮廓
contours, _ = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 获取最大轮廓
if contours:
contour = max(contours, key=cv2.contourArea)
else:
print("No contours found in the image.")
exit()
bounding_boxes = [
(571, 576, 902, 1017), # 示例目标框1
(527, 317, 713, 395),
(146, 211, 226, 359),
(764, 77, 1122, 700),
# ... 可以添加更多目标框
]
image_width=image.shape[1]
image_height=image.shape[0]
max_intersection_box_index = calculate_max_intersection(contour, bounding_boxes, image_width, image_height)
# 输出结果
if max_intersection_box_index is not None:
print(max_intersection_box_index )
else:
print("No bounding box intersects with the contour.")
运行A.py,调用B.py中的计算函数,输出0,如下:

















 728
728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











