









-
首先介绍矩阵的迹(trace)的概念:
如果一个矩阵是方阵,那它的迹tr(A)等于对角线的元素之和。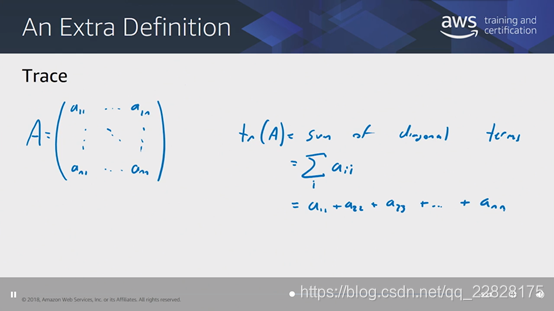
-
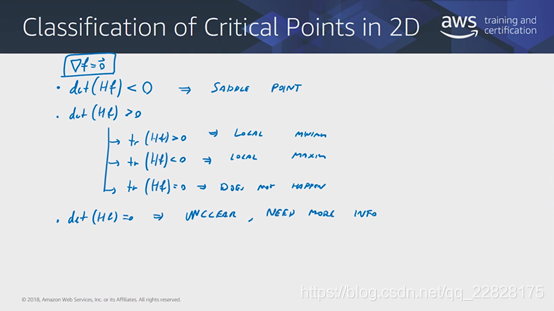
多元函数判断驻点性质的方法:
- 找到多元函数jacobian向量(即目标函数对自变量的一阶偏导数向量)为0的那些点,即驻点;
- 将各驻点带入Hessian矩阵(即目标函数对各自变量的二阶偏导数组成的对称方阵,若有n个自变量,则Hessian矩阵为n×n),计算其行列式det(Hf):若det(Hf)<0,则该驻点是鞍点;若det(Hf)=0,则无法判断该驻点是极小值点、极大值点、还是鞍点;若det(Hf)>0,则该驻点为极值点:若tr(A)>0,则该点周围各点处的切平面均倾斜向上,则该点为极小值点;若tr(A)<0,则该点周围各点处的切平面均倾斜向下,则该点为极大值点;而tr(A)=0的情况不会出现。
-
但是当自变量个数过多时,Hessian矩阵过大,计算其行列式很慢,而且可能不稳定;所以当自变量个数过多时,不宜采用该方法判断驻点性质。
-
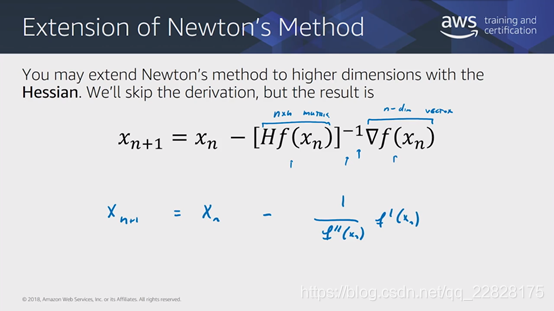
下图为一元函数及多元函数用牛顿法进行梯度下降的公式。可以看到,对于多元函数需要计算目标函数的Hessian矩阵的逆,而当自变量个数过多时,这将是灾难,此时不适宜用牛顿法进行梯度下降。
-
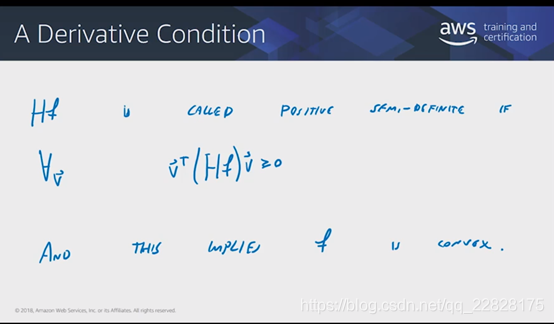
多元函数凸性的判断:如果存在一个向量V,使得transpose(V)(Hf)V≥0,则Hf称为半正定矩阵,此时Hessian矩阵的原函数f是凸函数。即可用任意一种局部优化算法找到该函数唯一的全局最优点。

















 1379
1379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









