







 增量型编码器用于测量物体转动角度,通过电信号转换成计数脉冲来反映位移。当编码器转动时,A相和B相的上升沿变化可判断正反转,Z相输出高电平脉冲表示一周。通过计算高电平个数与总格子数的比例可获取转动角度。实现角度测量的关键是设置外部中断,根据AB两相电平变化更新计数器。文中提供了一个自由摆平衡系统的代码示例。
增量型编码器用于测量物体转动角度,通过电信号转换成计数脉冲来反映位移。当编码器转动时,A相和B相的上升沿变化可判断正反转,Z相输出高电平脉冲表示一周。通过计算高电平个数与总格子数的比例可获取转动角度。实现角度测量的关键是设置外部中断,根据AB两相电平变化更新计数器。文中提供了一个自由摆平衡系统的代码示例。
作用:
测量物体转动角度。
原理:
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。这里的位移就反应了旋转的角度。
接线:
红色: VCC(5V)
黑色: GND
绿色: A相
白色: B相
黄色: Z相
如图:
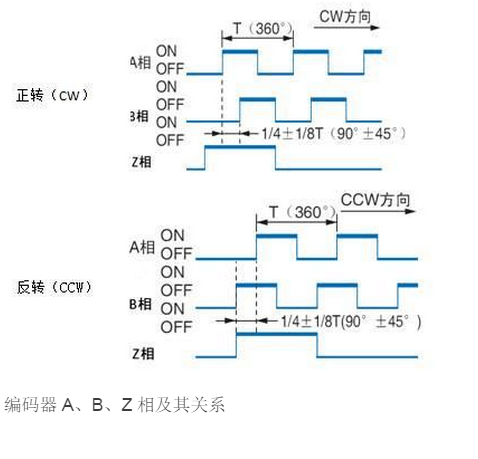
ABZ三相输出高低变化的电平。
当编码器正转时,A相上升沿超前于B相上升沿。
当编码器反转时,B相上升沿超前于A相上升沿。
当编码器旋转一周,Z相输出一个高电平脉冲。
当编码器的转轴因为外力而发生转动时,如果是正转那么编码器A相的上升沿会快于B,A相输出的持续高电平个数则定量反应了正方向转动的角度。
编码器里面有1024个黑格子(哈哈,不知道咋说),当转动了一定的角度后里面一定数量的黑格子则会被感应(不专业),被感应的格子数量就是输出的高电平数量。所以:
angle = cnt/1024*360
综上,我们测量角度只需两步:
一 判断是正转还是反转
二 计数持续的高电平个数
实现思路:
我们将AB两相接到
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1405
1405

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









