









概述
本文介绍了如何使用STM32微控制器,结合STM32CubeMX配置工具和SPI通讯接口,来驱动和控制WS2812 LED灯带。这是一个集硬件连接、软件配置和编程开发于一体的综合性项目,目标是实现对LED灯带颜色和亮度的精确控制。
最近在弄ST的课程,需要样片的可以加群申请:615061293 。
视频教学
https://www.bilibili.com/video/BV1X94y157W8/
STM32C0开发(1)----SPI 驱动WS2812灯珠
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
https://download.csdn.net/download/qq_24312945/88489586
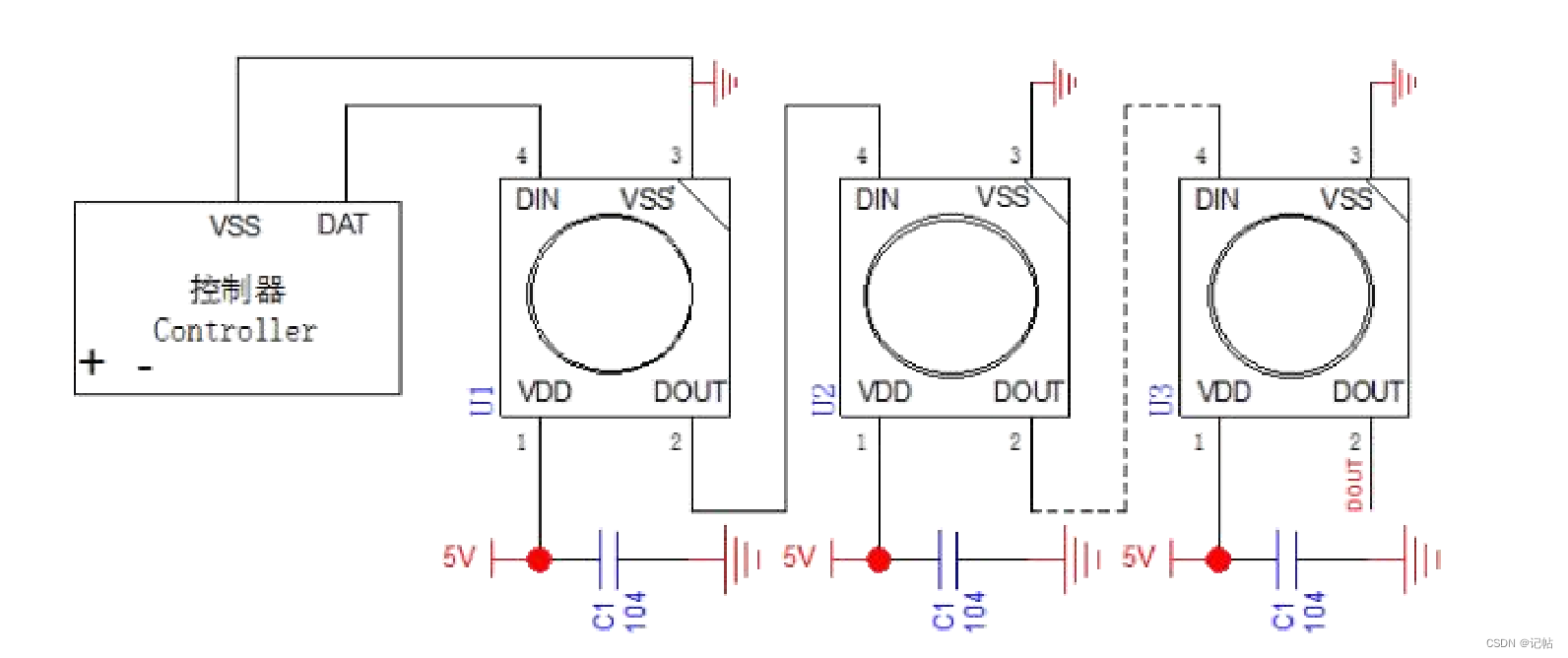
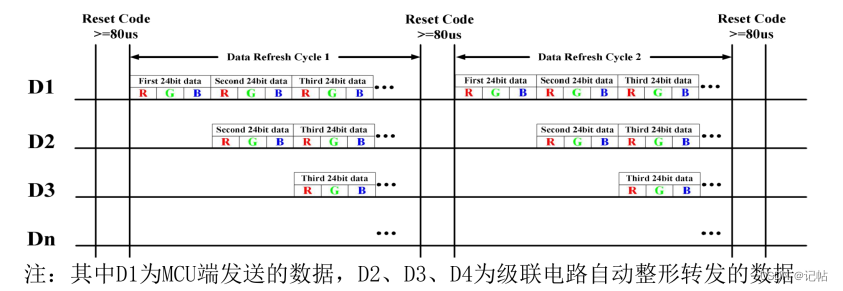
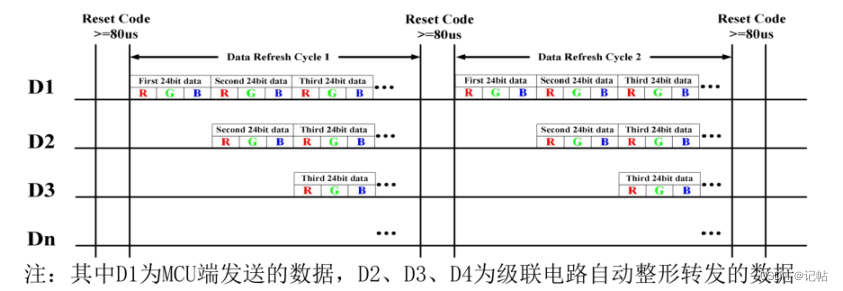
芯片级联方法
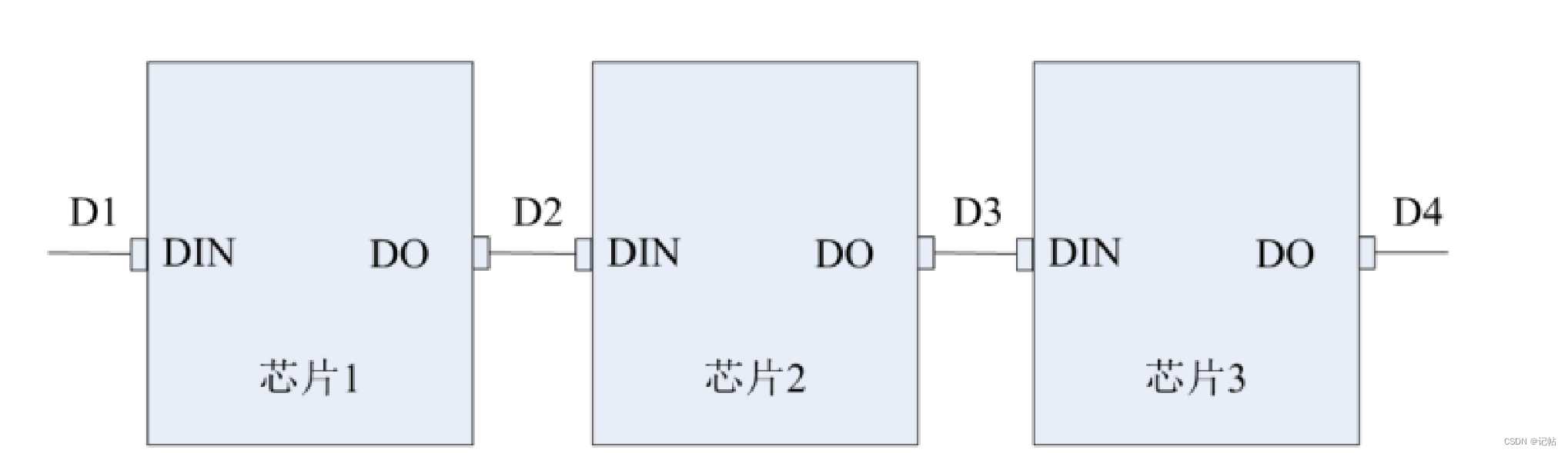
芯片在上电复位以后,接收DIN端打来的数据,接收够24bit后,DO端口开始转发数据,供下一个芯片提供输入数据。在转发之前,DO口一直拉低。此时灯珠将不接收新的数据,内置RGB芯片根据接收到的24bit数据后产生的不同占空比信号,展现不同亮度。如果DIN端输入信号为RESET信号,芯片将接收到的数据送显示,芯片将在该信号结束后重新接收新的数据,在接收完开始的24bit数据后,通过DO口转发数据,灯珠在没有接收到RESET码前,RGB亮度保持不变,当接收到80us以上低电平RESET码后,灯珠内部RGB芯片将根据刚才接收到的24bit数据后产生的不同占空比信号,展现不同亮度。
数据传输
24bit数据结构:

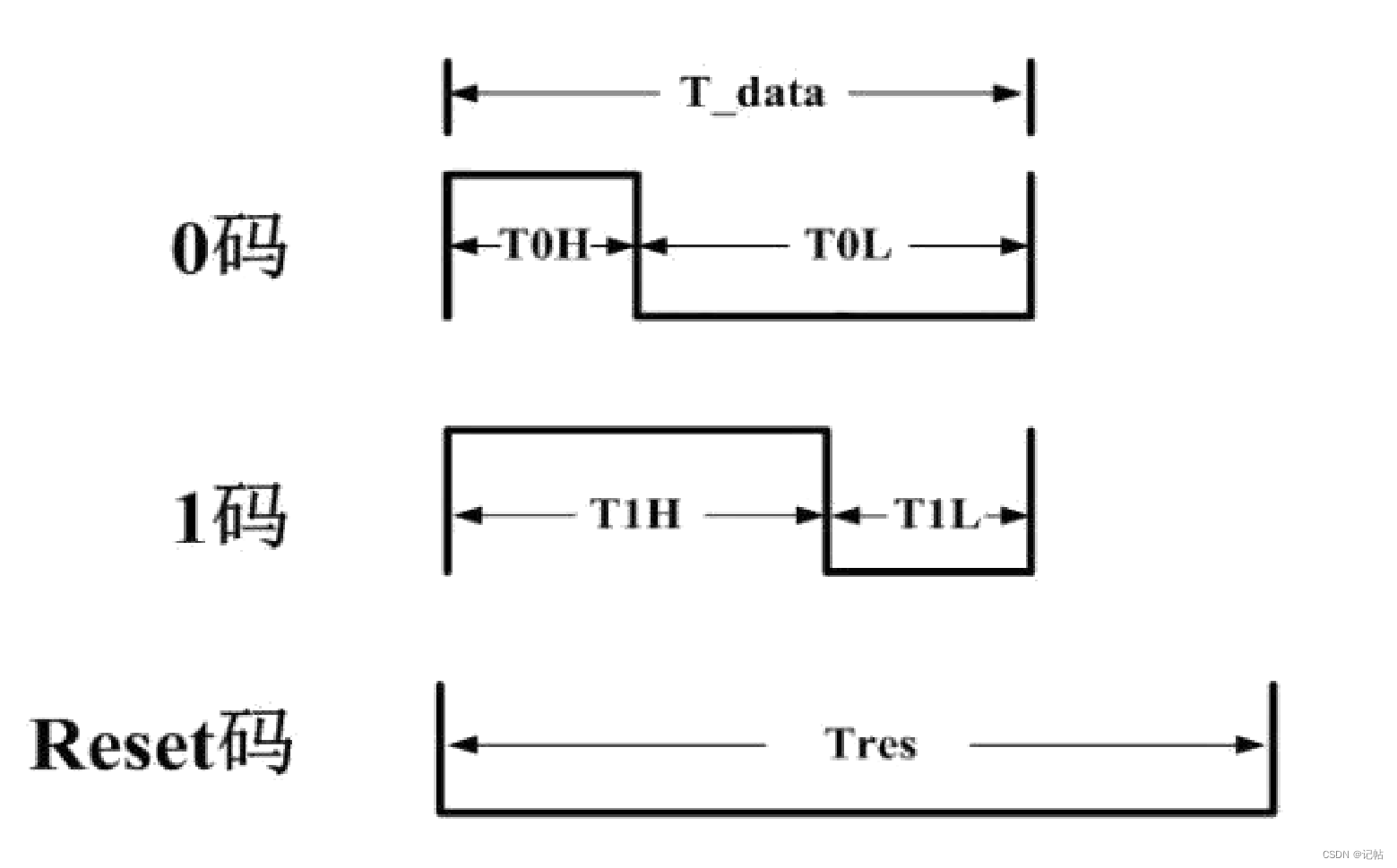
时序
时序波形图如下所示。
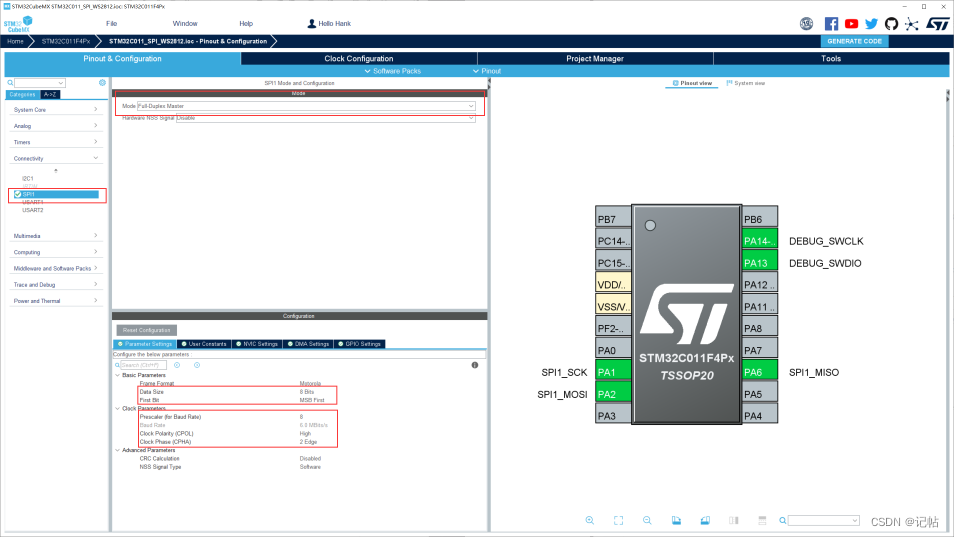
SPI配置
将SPI的配置速度设为6M,数据宽度设为8位。
CPHA配置为第二边沿采样;在第一个跳变沿时,MOSI在空闲状态保持高电平,而在第二个跳变沿,它会保持上一次传输的最终电平。由于发送数据的最后一位总是低电平,这样配置可以避免WS2812误判。CPOL设置为高,确保SCK在空闲时保持高电平状态。
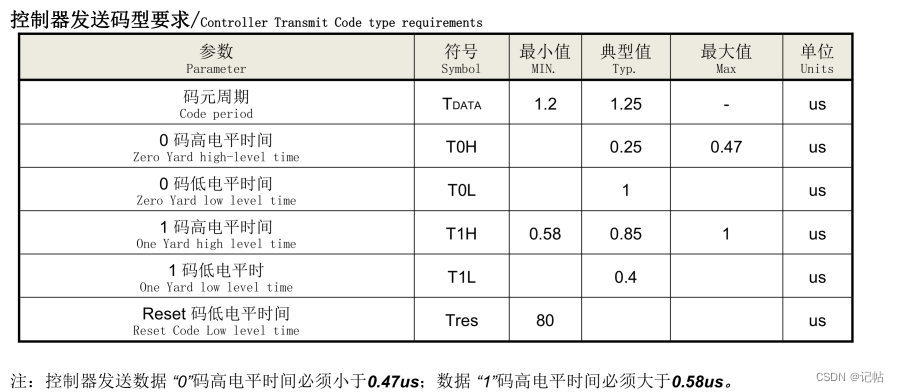
系统采用单总线协议,通过总线上高低电平的时长来区分逻辑0和1。WS2811工作在800kHz频率下,将SPI设置为6.4MHz—即其工作频率的8倍—可以确保每个字节(8位)正好对应一个逻辑位。在这种设置下,‘11111000’(0xF8)代表逻辑1,‘11000000’(0xC0)代表逻辑0。
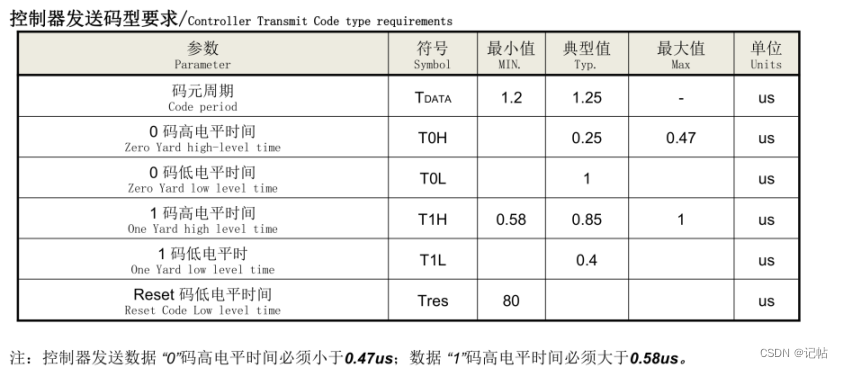
逻辑0下发送的数据为11000000’(0xC0)。
逻辑0下高电平位320ns。

逻辑0下低电平位1.01us。

逻辑1下发送的数据为‘11111000’(0xF8)。
逻辑1下高电平位830ns。

逻辑1下低电平位500ns。

这种精确的时序配置和电平控制对于确保WS2812灯带的正确驱动至关重要,可以通过上述配置来优化SPI接口的性能,确保与WS2812的高效通信。
CPHA配置
CPHA配置为第二边沿采样下数据传输结束如下所示。

CPHA配置为第二边沿采样下数据传输结束如下所示。

由于RESET Code为低电平,且要大于80us,所以数据传输完毕必须为低电平。
代码
在main.c中添加头文件。
/* USER CODE BEGIN Includes */
#include "ws2812.h"
#include <string.h>
/* USER CODE END Includes */
在main.c中添加函数申明和移位操作。
/* USER CODE BEGIN 0 */
extern tWs2812bCache_TypeDef gWs2812bDat[WS2812B_AMOUNT];
void move_Front()
{
uint8_t i;
uint8_t temp[3];
temp[0] = gWs2812bDat[0].R;
temp[1] = gWs2812bDat[0].G;
temp[2] = gWs2812bDat[0].B;
for (i = 0; i < WS2812B_AMOUNT-1; i++)
{
gWs2812bDat[i].R = gWs2812bDat[i+1].R;
gWs2812bDat[i].G = gWs2812bDat[i+1].G;
gWs2812bDat[i].B = gWs2812bDat[i+1].B;
}
gWs2812bDat[7].R = temp[0];
gWs2812bDat[7].G = temp[1];
gWs2812bDat[7].B = temp[2];
}
/* USER CODE END 0 */
添加初始化显示。
/* USER CODE BEGIN 2 */
WS2812B_Task();
HAL_Delay(1000);
/* USER CODE END 2 */
添加流水灯。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
WS2812B_Task();
move_Front();
HAL_Delay(100);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
ws2812.c
#include "ws2812.h"
#include "spi.h"
//灯条显存SPI数据缓存
uint8_t gWs2812bDat_SPI[WS2812B_AMOUNT * 24] = {0};
//灯条显存
tWs2812bCache_TypeDef gWs2812bDat[WS2812B_AMOUNT] = {
//R G B
0XFF, 0X00, 0X00, //0
0X00, 0XFF, 0X00, //1
0X00, 0X00, 0XFF, //2
0X00, 0XFF, 0XFF, //3
0XFF, 0X00, 0XFF, //4
0XFF, 0XFF, 0X00, //5
0XFF, 0XFF, 0XFF, //6
0X00, 0X00, 0X00, //7
};
void WS2812b_Set(uint16_t Ws2b812b_NUM, uint8_t r,uint8_t g,uint8_t b)
{
uint8_t *pR = &gWs2812bDat_SPI[(Ws2b812b_NUM) * 24 + 8];
uint8_t *pG = &gWs2812bDat_SPI[(Ws2b812b_NUM) * 24];
uint8_t *pB = &gWs2812bDat_SPI[(Ws2b812b_NUM) * 24 + 16];
for(uint8_t i = 0; i < 8; i++) {
if(g & 0x80) {
*pG = CODE_1;
}
else {
*pG = CODE_0;
}
if(r & 0x80) {
*pR = CODE_1;
}
else {
*pR = CODE_0;
}
if(b & 0x80) {
*pB = CODE_1;
}
else {
*pB = CODE_0;
}
r <<= 1;
g <<= 1;
b <<= 1;
pR++;
pG++;
pB++;
}
}
void WS2812B_Task(void)
{
uint8_t dat = 0;
//将gWs2812bDat数据解析成SPI数据
for(uint8_t iLED = 0; iLED < WS2812B_AMOUNT; iLED++)
{
WS2812b_Set(iLED, gWs2812bDat[iLED].R, gWs2812bDat[iLED].G, gWs2812bDat[iLED].B);
}
//总线输出数据
HAL_SPI_Transmit(&hspi1, gWs2812bDat_SPI, sizeof(gWs2812bDat_SPI),0XFFFF);
//使总线输出低电平
HAL_SPI_Transmit(&hspi1, &dat, 1,0XFFFF);
//帧信号:一个大于50us的低电平
HAL_Delay(1);
}
ws2812.h
#ifndef __WS2812_H__
#define __WS2812_H__
#include <stdint.h>
// 编码 0 : 11000000
#define CODE_0 0xC0
// 编码 1 : 11111000
#define CODE_1 0xF8
/*ws2812b灯珠数量*/
#define WS2812B_AMOUNT 8
typedef struct
{
uint8_t R;
uint8_t G;
uint8_t B;
} tWs2812bCache_TypeDef;
extern tWs2812bCache_TypeDef gWs2812bDat[WS2812B_AMOUNT];
void WS2812b_Set(uint16_t Ws2b812b_NUM, uint8_t r,uint8_t g,uint8_t b);
void WS2812B_Task(void);
#endif















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











