







阅前可看
Pytorch | yolov3原理及代码详解(一)
https://blog.csdn.net/qq_24739717/article/details/92399359
Pytorch | yolov3原理及代码详解(二)
https://blog.csdn.net/qq_24739717/article/details/96705055
上接“Pytorch | yolov3原理及代码详解(二)”的内容
2.3 查看训练指标并评估(train.py——part3)
这段完整代码如下:
for epoch in range(opt.epochs):
model.train()
start_time = time.time()
#print("len(dataloader):\n",len(dataloader))
for batch_i, (_, imgs, targets) in enumerate(dataloader):
batches_done = len(dataloader) * epoch + batch_i
imgs = Variable(imgs.to(device))
targets = Variable(targets.to(device), requires_grad=False)
print("targets.shape:\n",targets.shape)
loss, outputs = model(imgs, targets)
loss.backward()
if batches_done % opt.gradient_accumulations:
# Accumulates gradient before each step
optimizer.step()
optimizer.zero_grad()
# ----------------
# Log progress
# ----------------
log_str = "\n---- [Epoch %d/%d, Batch %d/%d] ----\n" % (epoch, opt.epochs, batch_i, len(dataloader))
metric_table = [["Metrics", *[f"YOLO Layer {i}" for i in range(len(model.yolo_layers))]]]
# Log metrics at each YOLO layer
for i, metric in enumerate(metrics):
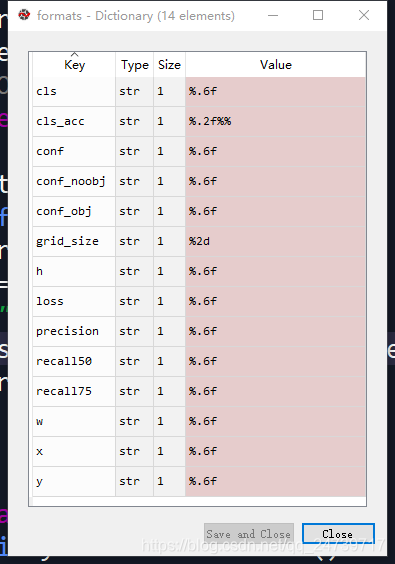
formats = {m: "%.6f" for m in metrics}
formats["grid_size"] = "%2d"
formats["cls_acc"] = "%.2f%%"
row_metrics = [formats[metric] % yolo.metrics.get(metric, 0) for yolo in model.yolo_layers]
metric_table += [[metric, *row_metrics]]
# Tensorboard logging
tensorboard_log = []
for j, yolo in enumerate(model.yolo_layers):
for name, metric in yolo.metrics.items():
if name != "grid_size":
tensorboard_log += [(f"{name}_{j+1}", metric)]
tensorboard_log += [("loss", loss.item())]
logger.list_of_scalars_summary(tensorboard_log, batches_done)
log_str += AsciiTable(metric_table).table
log_str += f"\nTotal loss {loss.item()}"
# Determine approximate time left for epoch
epoch_batches_left = len(dataloader) - (batch_i + 1)
time_left = datetime.timedelta(seconds=epoch_batches_left * (time.time() - start_time) / (batch_i + 1))
log_str += f"\n---- ETA {time_left}"
print(log_str)
model.seen += imgs.size(0)
if epoch % opt.evaluation_interval == 0:
print("\n---- Evaluating Model ----")
# Evaluate the model on the validation set
precision, recall, AP, f1, ap_class = evaluate(
model,
path=valid_path,
iou_thres=0.5,
conf_thres=0.5,
nms_thres=0.5,
img_size=opt.img_size,
batch_size=8,
)
evaluation_metrics = [
("val_precision", precision.mean()),
("val_recall", recall.mean()),
("val_mAP", AP.mean()),
("val_f1", f1.mean()),
]
logger.list_of_scalars_summary(evaluation_metrics, epoch)
# Print class APs and mAP
ap_table = [["Index", "Class name", "AP"]]
for i, c in enumerate(ap_class):
ap_table += [[c, class_names[c], "%.5f" % AP[i]]]
print(AsciiTable(ap_table).table)
print(f"---- mAP {AP.mean()}")
if epoch % opt.checkpoint_interval == 0:
torch.save(model.state_dict(), f"checkpoints/yolov3_ckpt_%d.pth" % epoch)
2.3.1 展示训练进度
log_str = "\n---- [Epoch %d/%d, Batch %d/%d] ----\n" % (epoch, opt.epochs, batch_i, len(dataloader))
metric_table = [["Metrics", *[f"YOLO Layer {i}" for i in range(len(model.yolo_layers))]]]
2.3.2 获取指标
从metrics中获取指标类型,并保存到format中。
下一步便通过for循环获取3个yolo层的各项指标,如grid_size、loss、坐标等。并保存在metric_table列表中


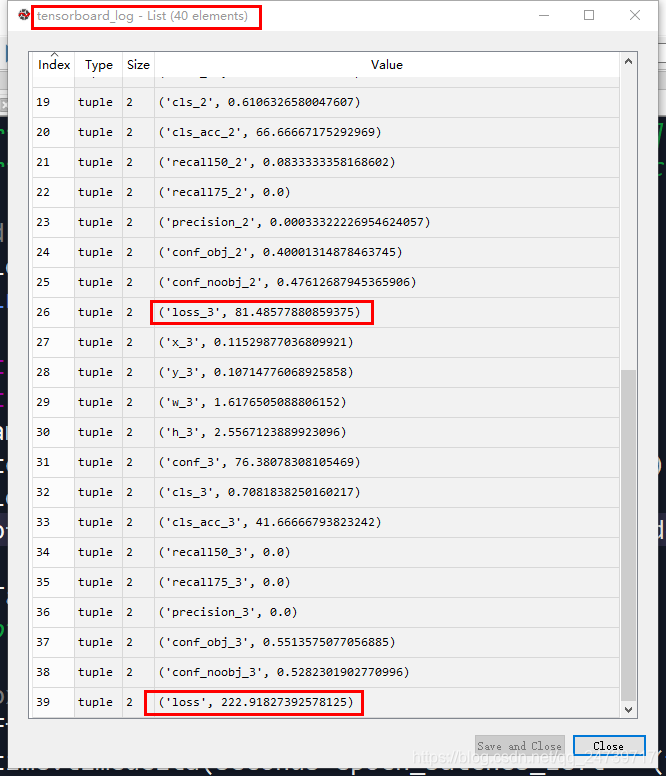
并通过一下代码解析yolo层的参数,放进列表tensorboard_log中。
tensorboard_log = []
for j, yolo in enumerate(model.yolo_layers):
for name, metric in yolo.metrics.items():
if name != "grid_size":
tensorboard_log += [(f"{name}_{j+1}", metric)]
tensorboard_log += [("loss", loss.item())]
logger.list_of_scalars_summary(tensorboard_log, batches_done)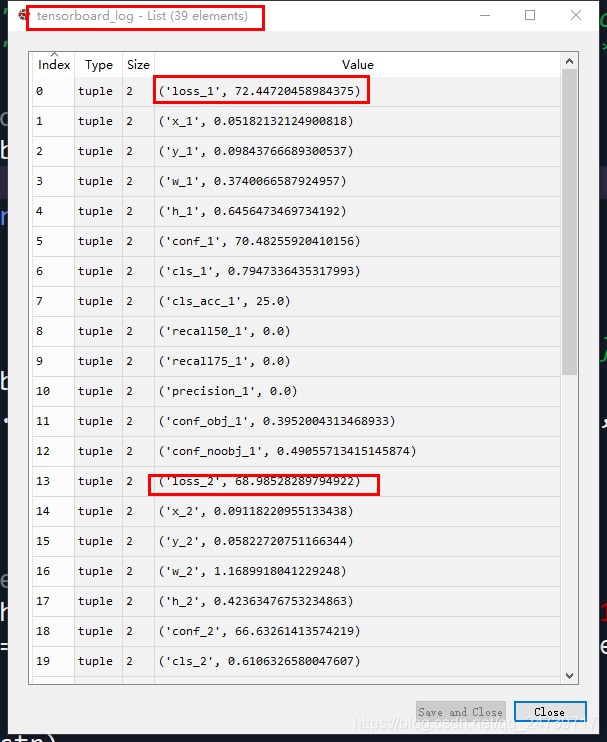
使用log_str打印各项指标参数:

2.3.2 评估训练情况
precision, recall, AP, f1, ap_class = evaluate(
model,
path=valid_path,
iou_thres=0.5,
conf_thres=0.5,
nms_thres=0.5,
img_size=opt.img_size,
batch_size=8,
)使用evaluate函数得到各项指标,evaluate函数完整代码如下:
def evaluate(model, path, iou_thres, conf_thres, nms_thres, img_size, batch_size):
model.eval()
# Get dataloader
dataset = ListDataset(path, img_size=img_size, augment=False, multiscale=False)
dataloader = torch.utils.data.DataLoader(
dataset, batch_size=batch_size, shuffle=False, num_workers=1, collate_fn=dataset.collate_fn
)
Tensor = torch.cuda.FloatTensor if torch.cuda.is_available() else torch.FloatTensor
labels = []
sample_metrics = [] # List of tuples (TP, confs, pred)
for batch_i, (_, imgs, targets) in enumerate(tqdm.tqdm(dataloader, desc="Detecting objects")):
# Extract labels
labels += targets[:, 1].tolist()
# Rescale target
targets[:, 2:] = xywh2xyxy(targets[:, 2:])
targets[:, 2:] *= img_size
imgs = Variable(imgs.type(Tensor), requires_grad=False)
with torch.no_grad():
outputs = model(imgs)
outputs = non_max_suppression(outputs, conf_thres=conf_thres, nms_thres=nms_thres)
sample_metrics += get_batch_statistics(outputs, targets, iou_threshold=iou_thres)
# Concatenate sample statistics
true_positives, pred_scores, pred_labels = [np.concatenate(x, 0) for x in list(zip(*sample_metrics))]
precision, recall, AP, f1, ap_class = ap_per_class(true_positives, pred_scores, pred_labels, labels)
return precision, recall, AP, f1, ap_class这段代码思路很清晰,加载数据和标签,使用xywh2xyxy函数把target坐标进行转换。使用with torch.no_grad():进行模型预测,减少资源浪费。同时对输出进行非极大值抑制,对输出进行筛选。
pytorch的基本使用可看http://blog.sina.com.cn/s/blog_a99f842a0102y1e4.html
“with torch.no_grad(): ”:
为了防止跟踪历史(和使用内存),你还可以用“with torch.no_grad(): ”来包装代码块。
这在评估一个模型时特别有用,因为模型可能有可训练参数(具有属性“requiresgrad=True”),但我们并不需要整个模型的所有梯度。
这句代码是上段的核心:sample_metrics += get_batch_statistics(outputs, targets, iou_threshold=iou_thres)。
评估的时候主要需要2个值,1、样本标注值。2、模型输出值。
1。样本的标注值。为了方便理解,这里简单回顾一下:voclabel.py会生成标注文件,保存在xxxx.txt文件中,每个.txt文件中的内容为了不混淆,我们称之为boxes,其boxes=【class id, x, y, w, h】按这种形式进行保存的。在ListDataset类中的__getitem__函数,会读取这个boxes,并把它从x,y,w,h(已经归一化成0~1)转换成对应特征图大小下的x,y,w,h的形式,并保存为targets。( targets = torch.zeros((len(boxes), 6)) ;targets[:, 1:] = boxes )。不过在评估的时候,为了方便计算IOU值,把target的坐标从x,y,w,h转换到xmin,ymin,xmax,ymax。
2。模型输出值。模型的输出output的shape为【batch_size,10647,5+class】。经过非极大值抑制处理之后,outputs的变成了一个列表,根据非极大值抑制处理的说明Returns detections with shape: (x1, y1, x2, y2, object_conf, class_score, class_pred),output变成了一个列表,长度为batch_size(下图设置的是8),可以看到每一个列表元素对应的张量的shape都是不一样的,这是因为每一张图片经过非极大值抑制处理之后剩下的boxes是不一样的,即tensor.shape(0)是不一样的,但tensor.shape(1)均为7,对应的是(x1, y1, x2, y2, object_conf, class_score, class_pred)。
![]()
![]()

使用了get_batch_statistics函数,获取测试样本的各项指标。结合下面代码,不难理解。其完整代码如下:
def get_batch_statistics(outputs, targets, iou_threshold):
""" Compute true positives, predicted scores and predicted labels per sample """
batch_metrics = []
for sample_i in range(len(outputs)):
if outputs[sample_i] is None:
continue
output = outputs[sample_i]
pred_boxes = output[:, :4]
pred_scores = output[:, 4]
pred_labels = output[:, -1]
true_positives = np.zeros(pred_boxes.shape[0])
annotations = targets[targets[:, 0] == sample_i][:, 1:]
target_labels = annotations[:, 0] if len(annotations) else []
if len(annotations):
detected_boxes = []
target_boxes = annotations[:, 1:]
for pred_i, (pred_box, pred_label) in enumerate(zip(pred_boxes, pred_labels)):
# If targets are found break
if len(detected_boxes) == len(annotations):
break
# Ignore if label is not one of the target labels
if pred_label not in target_labels:
continue
iou, box_index = bbox_iou(pred_box.unsqueeze(0), target_boxes).max(0)
if iou >= iou_threshold and box_index not in detected_boxes:
true_positives[pred_i] = 1
detected_boxes += [box_index]
batch_metrics.append([true_positives, pred_scores, pred_labels])
return batch_metrics
annotations = targets[targets[:, 0] == sample_i][:, 1:],这句把对应ID下的target和图像进行匹配,这点在“Pytorch | yolov3原理及代码详解(二)”中讲到过,使用collate_fn函数给target赋予ID。
precision, recall, AP, f1, ap_class值则是使用ap_per_class函数进行计算,完整代码如下:
def ap_per_class(tp, conf, pred_cls, target_cls):
""" Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
tp: True positives (list).
conf: Objectness value from 0-1 (list).
pred_cls: Predicted object classes (list).
target_cls: True object classes (list).
# Returns
The average precision as computed in py-faster-rcnn.
"""
# Sort by objectness
i = np.argsort(-conf)
tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
# Find unique classes
unique_classes = np.unique(target_cls)
# Create Precision-Recall curve and compute AP for each class
ap, p, r = [], [], []
for c in tqdm.tqdm(unique_classes, desc="Computing AP"):
i = pred_cls == c
n_gt = (target_cls == c).sum() # Number of ground truth objects
n_p = i.sum() # Number of predicted objects
if n_p == 0 and n_gt == 0:
continue
elif n_p == 0 or n_gt == 0:
ap.append(0)
r.append(0)
p.append(0)
else:
# Accumulate FPs and TPs
fpc = (1 - tp[i]).cumsum()
tpc = (tp[i]).cumsum()
# Recall
recall_curve = tpc / (n_gt + 1e-16)
r.append(recall_curve[-1])
# Precision
precision_curve = tpc / (tpc + fpc)
p.append(precision_curve[-1])
# AP from recall-precision curve
ap.append(compute_ap(recall_curve, precision_curve))
# Compute F1 score (harmonic mean of precision and recall)
p, r, ap = np.array(p), np.array(r), np.array(ap)
f1 = 2 * p * r / (p + r + 1e-16)
return p, r, ap, f1, unique_classes.astype("int32")
在训练到一定程度的时候,便保存模型:
if epoch % opt.checkpoint_interval == 0:
torch.save(model.state_dict(), f"checkpoints/yolov3_ckpt_%d.pth" % epoch)以上,train.py基本分析完毕。
其实还有一个test.py函数,但是在train.py以及使用其中的evaluation函数了,所以不在另作分析。剩下还,一点总结还有整体程序流程图,将放在下一个部分:
Pytorch | yolov3原理及代码详解(四)(更新中)
已更完
Pytorch | yolov3原理及代码详解(四)















 1070
1070











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









