







相机模型,主要有finite camera 和 infinite camera。
其中finite camera就是我们常说的针孔模型,本文对针孔模型的成像过程进行了推导。推导过程如下:
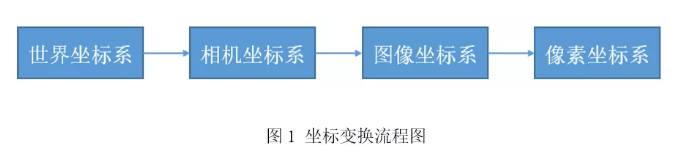
(a) 先假设相机坐标系与世界坐标系重合,推导从相机坐标系到像素坐标系的变换,包括相机坐标系到图像坐标系,图像坐标系到像素坐标系;
(b) 再推导世界坐标系到相机坐标系的变换;
(c) 最后得到世界坐标系到像素坐标系的变换公式。
本文涉及公式推导,在段落中也掺杂一些公式,为了方便编写和查看,下文是小编在word上编写完成后所截图像。
码公式不易,未经允许禁止转载。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 571
571











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









