







Deep Lagrangian Networks for end-to-end learning of energy-based control for under-actuated systems
摘要
将深度学习应用于控制领域,对实现机器人控制律的智能化设计具有很大的潜力。然而,常用的控制深度学习方法,如深度强化学习,需要与实际系统进行脱离实际的交互,不能产生任何性能保证,也不能很好地利用控制理论的基本规则。特别是,普通的黑盒方法——从控制中放弃所有的理解——不适合复杂的机器人系统。
我们提出一种深度控制方法,该方法以传统的能量控制方法为基础将控制方法和灵活的学习方法结合。为了实现这一目标,我们将深度拉格朗日网络(DeLaN)推广到遵循拉格朗日力学理论,保证能量守恒和学习方法的‘。这种新的扩展嵌入能量控制律中,用于控制欠驱动系统。所得到的DeLaN能量控制(Dela4EC)是使用通用函数逼近的第一模型学习方法,它能够学习能量控制,因为现有的方法不能直接学习系统能量。DeLaN 4EC对物理倒立摆具有很好的实时控制能力,当系统辨识的控制律不起作用时,delan4ec可以学习摆起。
贡献
本文的贡献在于对DeLaN的新扩展,并将DeLaN与能量控制(DeLaN 4EC)相结合,对欠驱动系统进行控制。
首先,我们将DeLaN推广到能量守恒和摩擦力的概念。因此,扩展的DeLaN不仅遵循拉格朗日力学,而且保证了能量守恒、能量的时间相干性和学习表示的被动性。
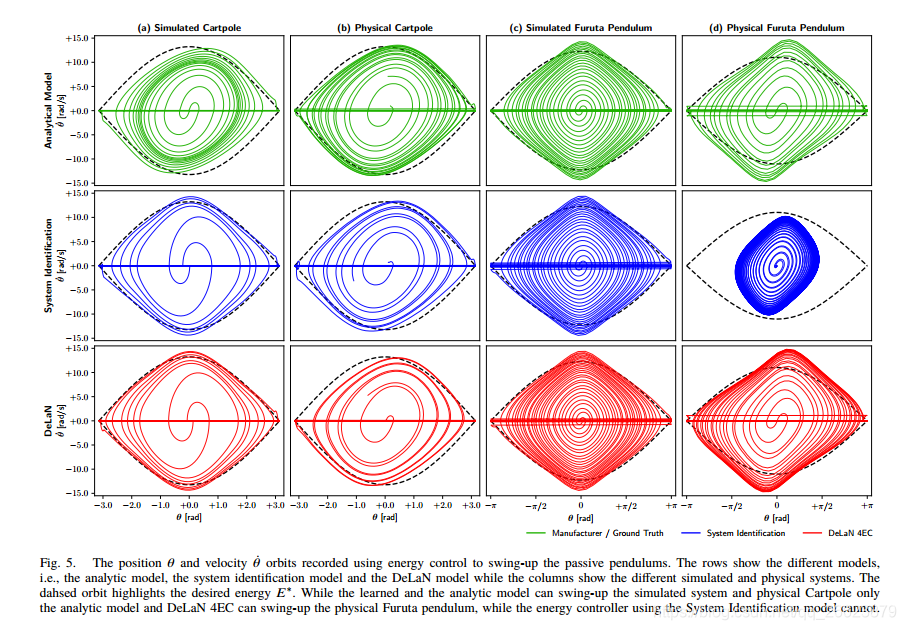
其次,我们证明了这种组合可以实现对手摇和Furuta摆的能量控制。这在仿真中得到了验证,并在500Hz的物理Furuta摆上得到了实时验证,而在仿真中没有预先训练。并与制造商的分析模型和标准系统辨识方法进行了比较。
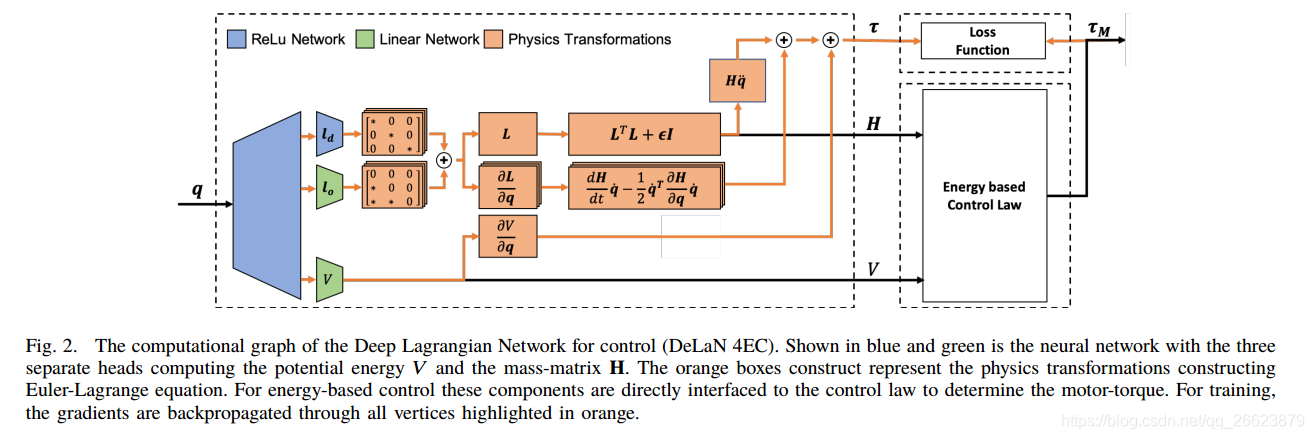
方法
本文是在Deep lagrangian networks: Using physics as model prior for deep learning基础上扩展导能量控制中,应用能量守恒规则学习摩擦力的影响,然后用能量控制原理,让控制器进行能量控制输出u,调节系统
机械臂物理模型
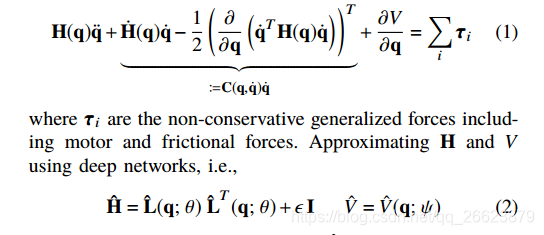
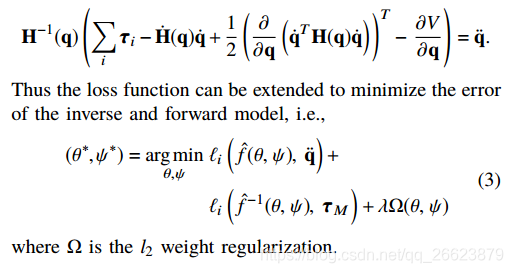
向前的模型设计
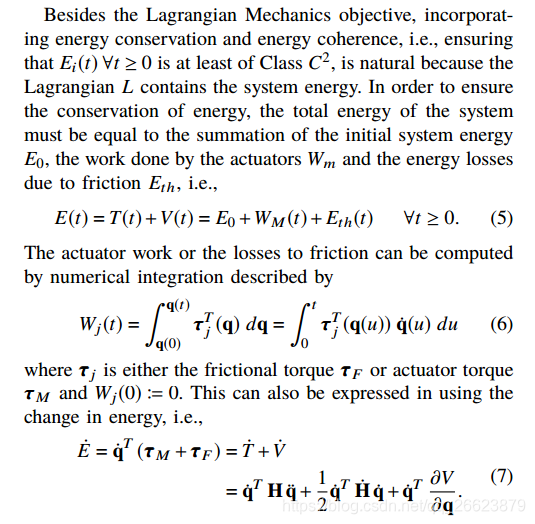
能量模型
从中能够得到,电机输出能量,物理模型观测值的能量,剩余的为摩擦损失能量
在设计的深度拉格朗日和能量控制的条件下,本文的输出控制U
结果
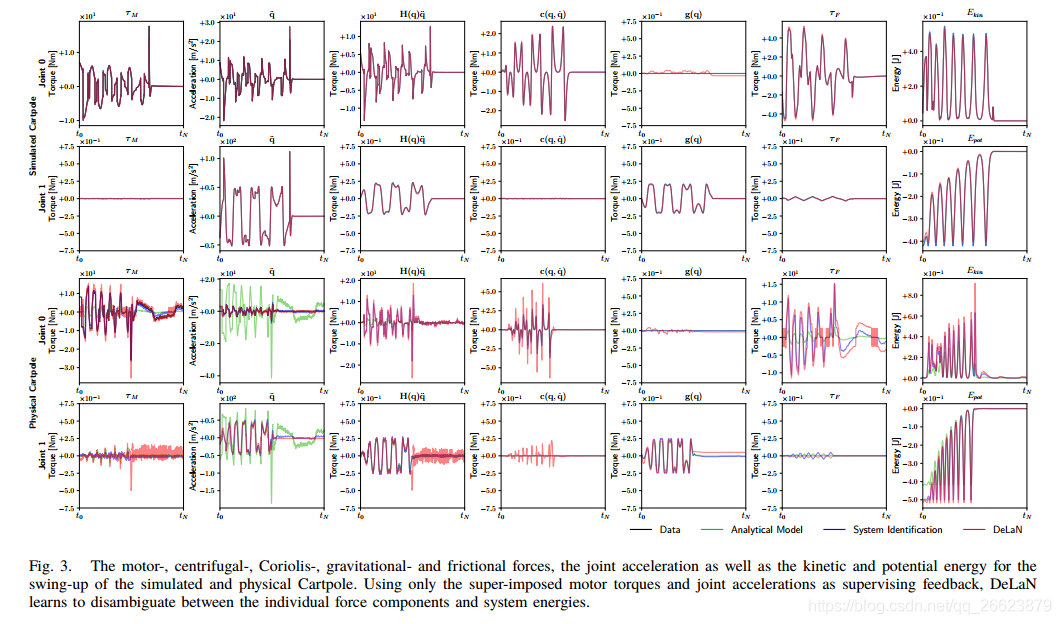
各个关节的参数估计,输出结果
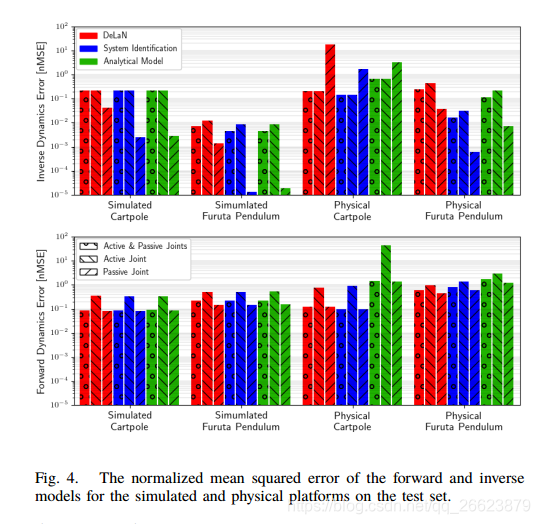
反动力误差估计和动力模型误差估计
追踪控制实验


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









