








SemanticKITTI: A Dataset for Semantic Scene Understanding of LiDAR Sequences
摘要
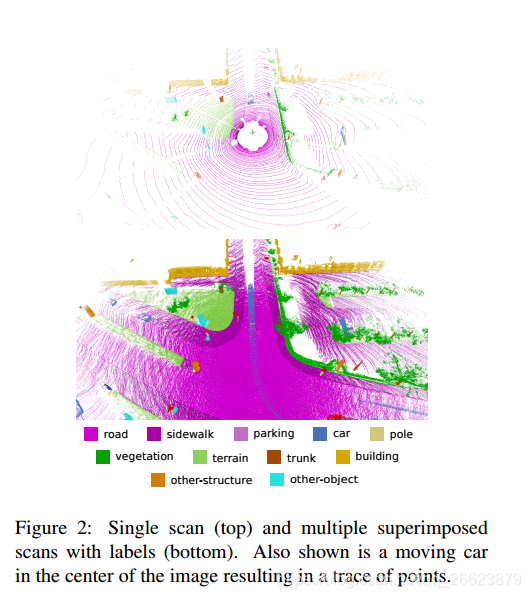
语义场景理解对于各种应用都是非常重要的。特别是,自动驾驶汽车需要对其附近的表面和物体有细致的了解。光探测和测距(lidar)提供精确的环境几何信息,因此是几乎所有自动驾驶汽车传感器套件的一部分。尽管语义场景理解与此应用程序相关,但此任务缺乏基于汽车激光雷达的大型数据集。在本文中,我们引入了一个大数据集来推动基于激光的语义分割的研究。我们注释了Kitti视觉里程计基准的所有序列,并为所使用的汽车激光雷达的完整360度视野提供了密集的逐点注释。基于该数据集,我们提出了三个基准任务:(1)单次扫描点云的语义分割;(2)多次扫描的语义分割;(3)语义场景完成,这需要对未来的语义场景进行预测。我们提供了基线实验,并表明需要更复杂的模型来有效地处理这些任务。我们的数据集为更先进方法的发展打开了大门,同时也为探索新的研究方向提供了丰富的数据。
贡献
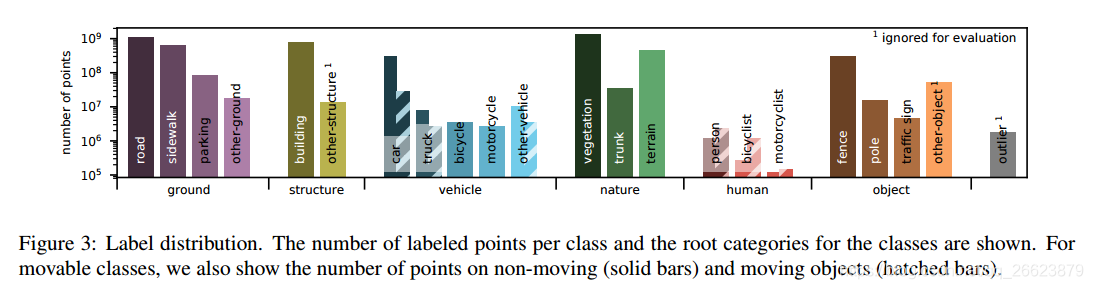
提供了一个点云序列的点注释数据集,它具有前所未有的类数和每次扫描的未知详细程度。
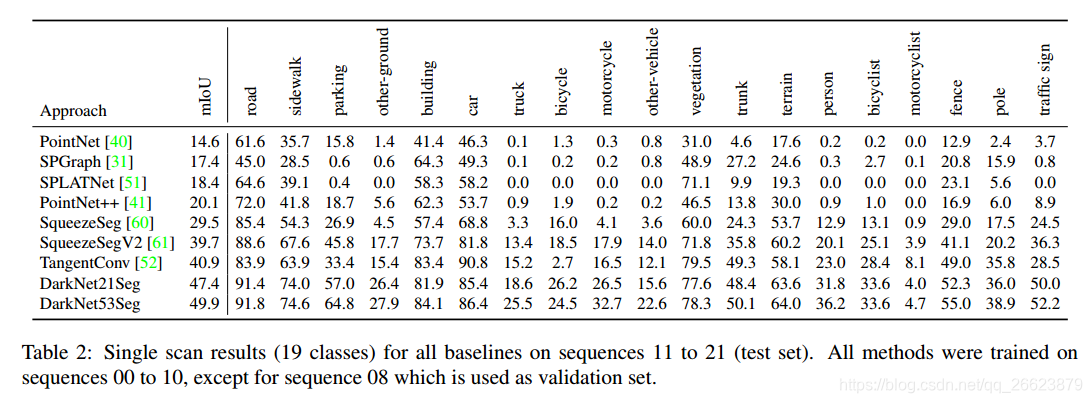
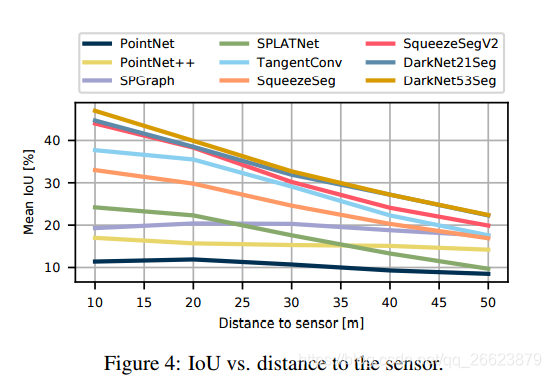
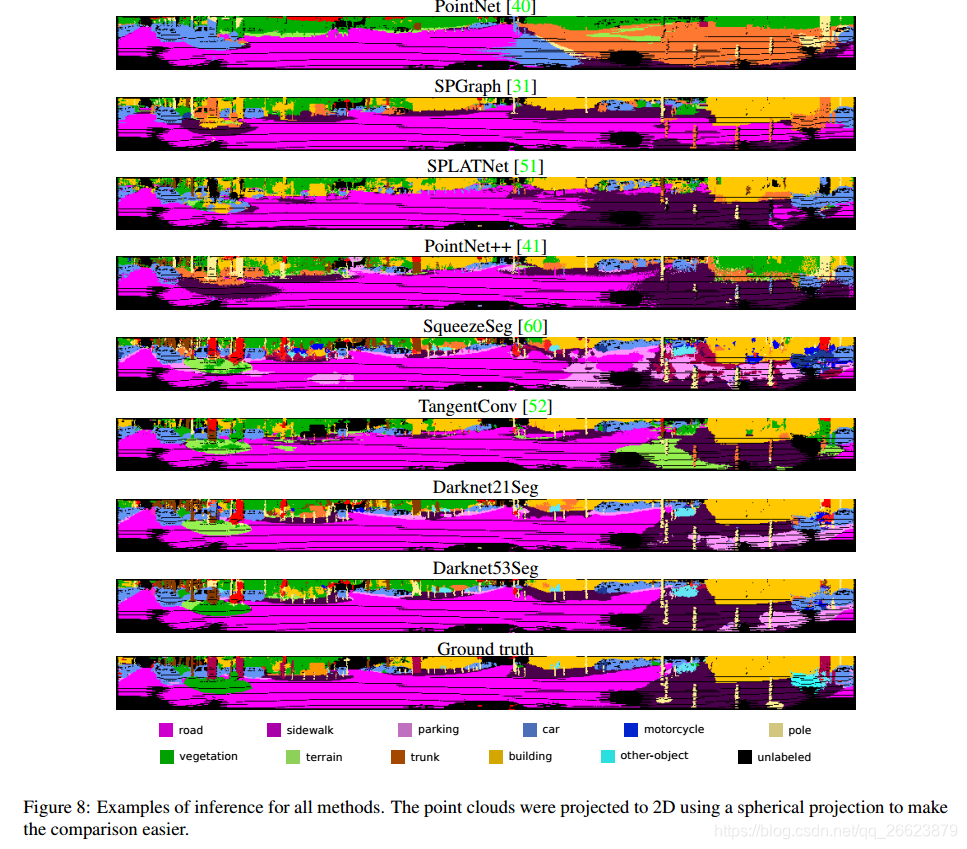
还对点云语义分割的最新方法进行了评估。
研究了序列信息在使用多个扫描进行语义分割中的应用。
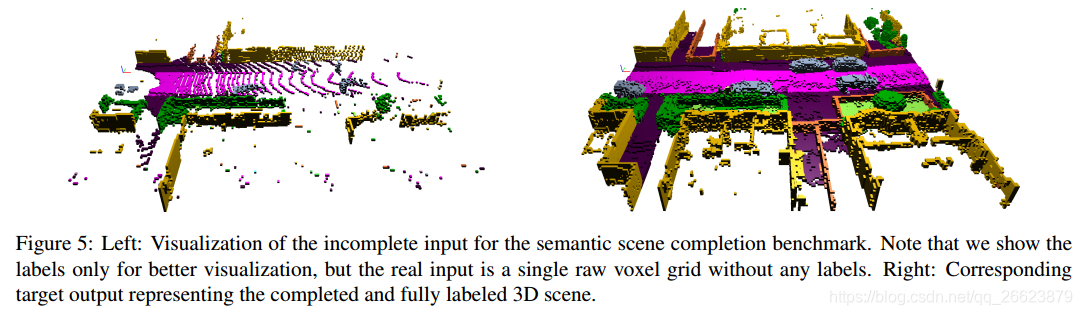
基于对运动车辆序列的标注,我们进一步引入了一个用于语义场景完成的真实数据集,并提供了基线结果。
与基准网站一起,点云标记工具也可公开使用,使其他研究人员能够在未来生成其他标记数据集。
方法
场景理解数据集
实验














 1963
1963











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









