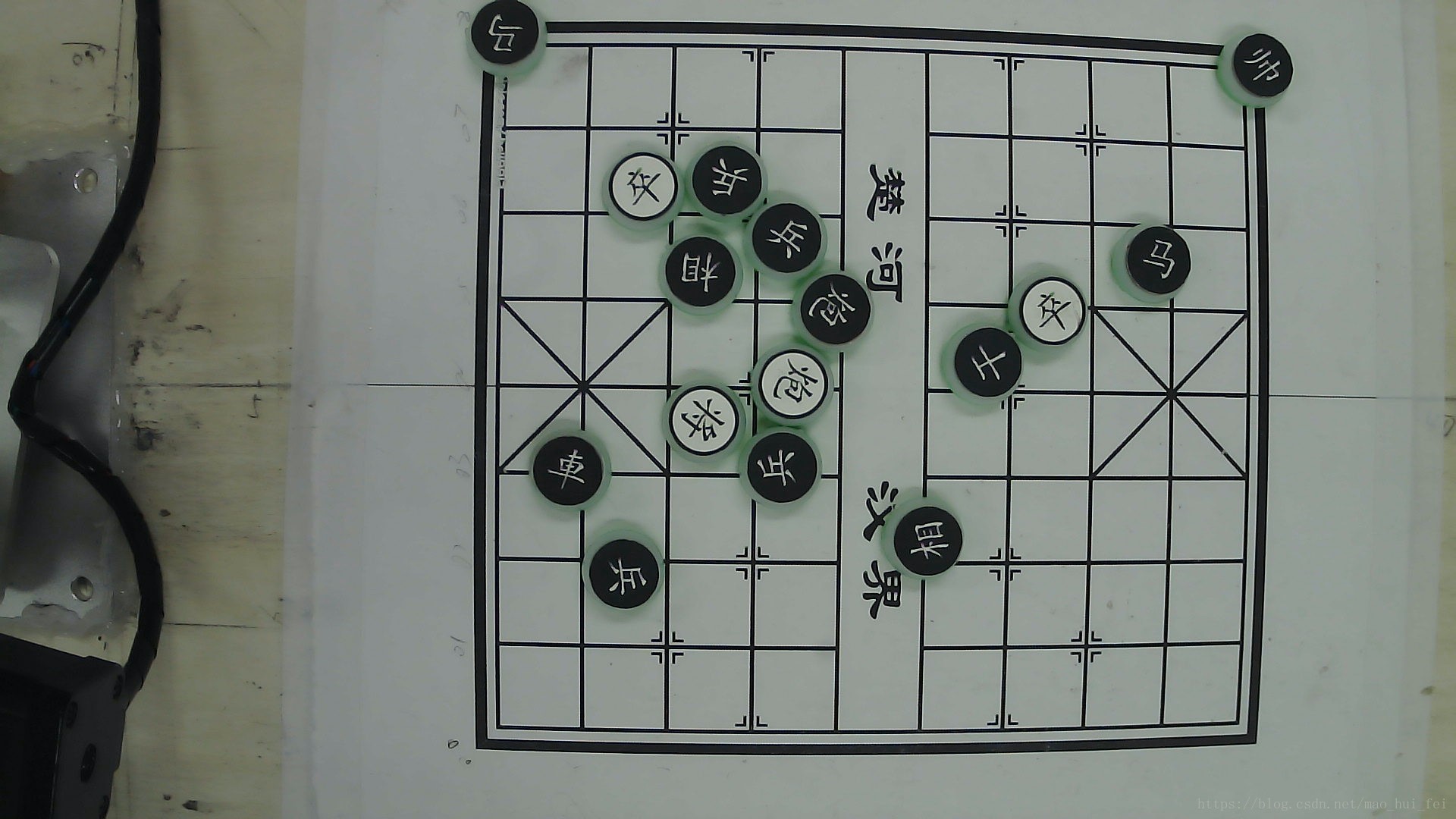
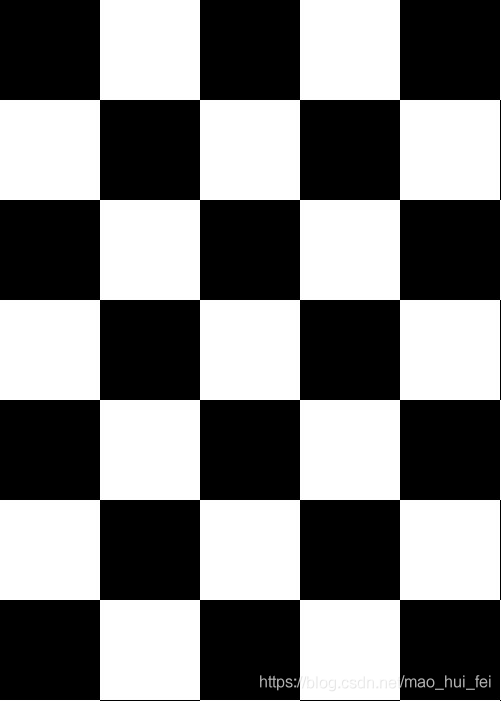
相机畸变矫正
最新推荐文章于 2024-01-04 10:32:50 发布

 4578
3708
2349
4578
3708
2349











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看


 订阅专栏 解锁全文
订阅专栏 解锁全文
























