







 本文深入探讨了实时渲染中图形渲染管线的光栅化和像素处理阶段,包括三角形设置、三角形遍历、像素着色和合并。光栅化将二维顶点转换为屏幕像素,而像素处理涉及着色计算和颜色合并。重点介绍了光栅化阶段的三角形遍历算法,以及像素处理阶段的像素着色和合并,包括纹理应用、z缓冲区和模板缓冲区的作用。
本文深入探讨了实时渲染中图形渲染管线的光栅化和像素处理阶段,包括三角形设置、三角形遍历、像素着色和合并。光栅化将二维顶点转换为屏幕像素,而像素处理涉及着色计算和颜色合并。重点介绍了光栅化阶段的三角形遍历算法,以及像素处理阶段的像素着色和合并,包括纹理应用、z缓冲区和模板缓冲区的作用。
——————分割线 2020.7.20——————
翻新了一遍译文,统一了名词,补充了漏译的部分。

实时渲染(第四版)Real-Time Rendering (Fourth Edition)
第2章 图形渲染管线 Chapter 2 The Graphics Rendering Pipeline
2.4 光栅化阶段 Rasterization
给定经过变换和投影的顶点及其关联的着色数据之后(数据全部来自几何处理过程),下一阶段的目标是找到需要渲染的图元(例如一个三角形)内的所有像素(像素即图片元素 picture elements 的缩写)。我们称这种过程为光栅化,它被分为两个功能子阶段:三角形设置(triangle setup,也称为基本装配)和三角形遍历(triangle traversal)。这些显示在图 2.8 的左侧。请注意,它们也可以处理点和线,但是由于三角形最常见,因此子阶段的名称中带有“ 三角形”。光栅化,也称为扫描转换,是从屏幕空间中的二维顶点——每个顶点具有 z 值(即深度值)以及与每个顶点相关的各种着色信息——到屏幕上像素的转换。光栅化也可以被视为几何处理和像素处理之间的同步点,因为在这里,三角形是由三个顶点形成的,并且最终将往下发送以进行像素处理。
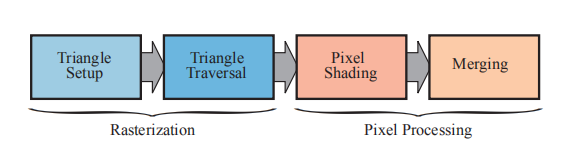
图2.8. 左:光栅化分为两个功能阶段,称为三角形设置与三角形遍历。右:像素处理分为两个功能阶段,即像素着色与合并。
三角形是否被认为与像素重叠取决于你如何设置 GPU 的管线。例如,你可以使用点采样来确定“内部”。最简单的情况是在每个像素的中心使用一个点采样,因此,如果该中心点在三角形内部,则相应的像素也被认为在三角形内部。您还可以使用超级采样或多重采样反走样技术对每个像素使用一个以上的采样(第 5.4.2 节)。还有一种方法是使用保守光栅化,其定义是,只要像素有部分与三角形重叠,则该像素就位于三角形内(第 23.1.2 节)。
2.4.1 三角形设置 Triangle Setup
在这一阶段,计算了三角形的微分、边缘方程和其他数据。 这些数据可用于三角形遍历(第 2.4.2 节)以及几何阶段产生的各种着色数据的插值。 固定功能硬件既适用于此任务。
2.4.2 三角形遍历 Triangle Traversal
在这个阶段,我们将检查每个像素(或样本)中心被三角形覆盖的情况,并为与三角形重叠的像素部分生成一个片元(fragment)。更多详细的采样方法可以在第 5.4 节中找到。找出三角形内的样本与像素的过程通常被称为三
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









