







YoloV7
论文
YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
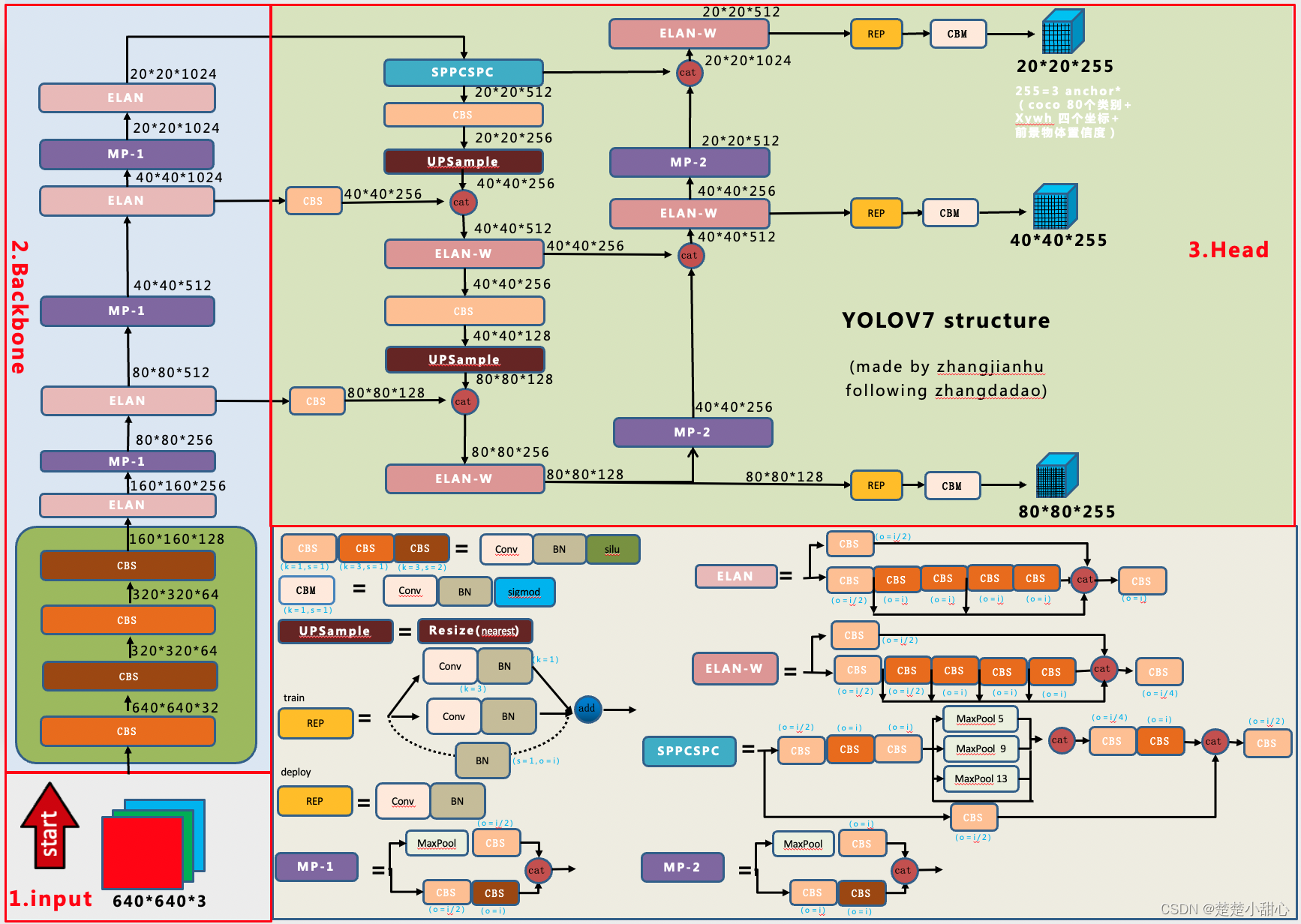
模型结构
YOLOV7是2022年最新出现的一种YOLO系列目标检测模型,该模型的网络结构包括三个部分:input、backbone和head。
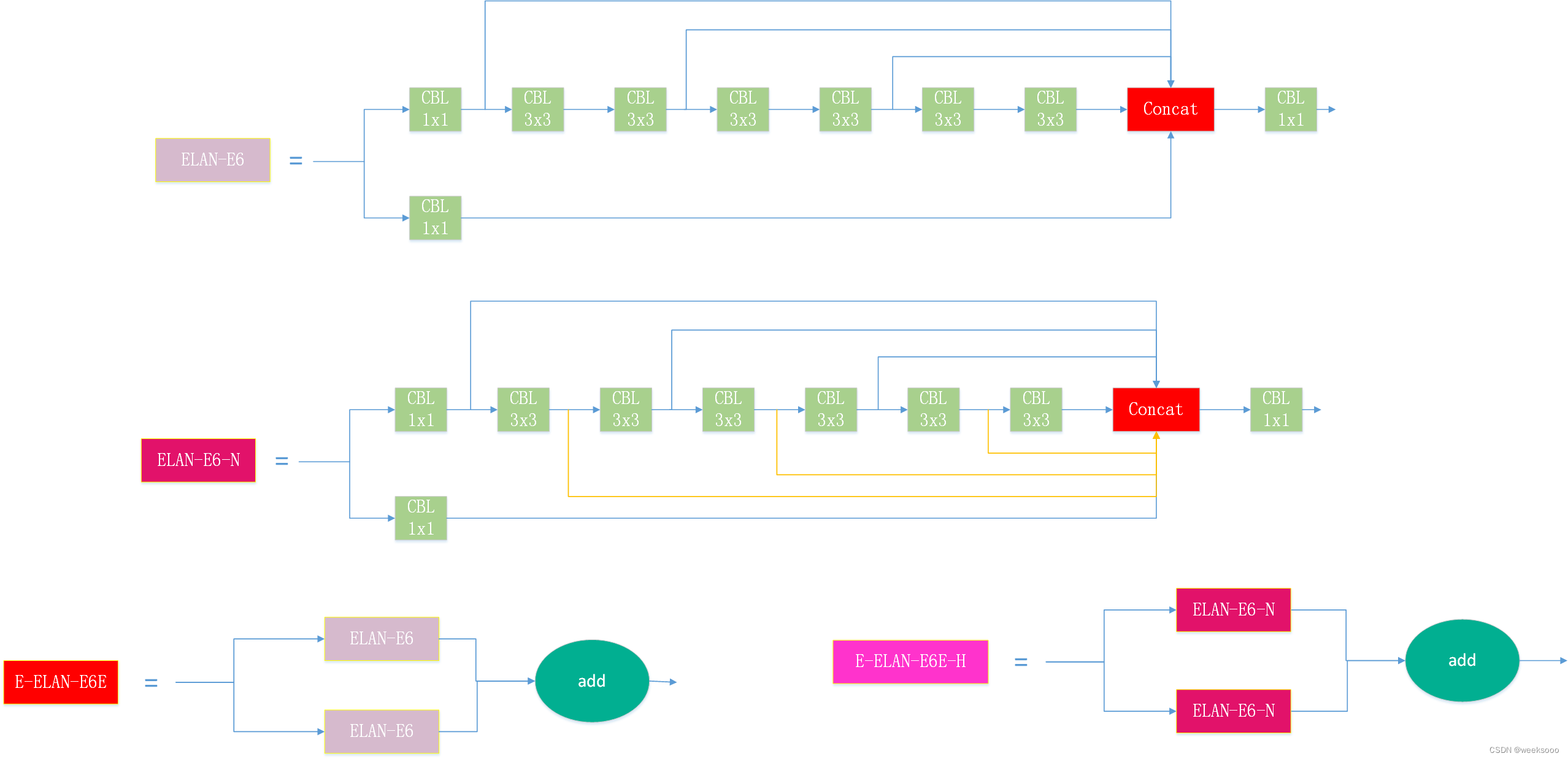
算法原理
YOLOv7的作者提出了 Extended-ELAN (E-ELAN)结构。E-ELAN采用了ELAN类似的特征聚合和特征转移流程,仅在计算模块中采用了类似ShuffleNet的分组卷积、扩张模块和混洗模块,最终通过聚合模块融合特征。通过采用这种方法可以获得更加多样的特征,同时提高参数的计算和利用效率。
环境配置
Docker(方法一)
拉取镜像:
docker pull image.sourcefind.cn:5000/dcu/admin/base/migraphx:4.0.0-centos7.6-dtk23.04.1-py38-latest
创建并启动容器:
docker run --shm-size 16g --network=host --name=yolov7_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v $PWD/yolov7_migraphx:/home/yolov7_migraphx -it <Your Image ID> /bin/bash
# 激活dtk
source /opt/dtk/env.sh
Dockerfile(方法二)
cd ./docker
docker build --no-cache -t yolov7_migraphx:2.0 .
docker run --shm-size 16g --network=host --name=yolov7_migraphx --privileged --device=/dev/kfd --device=/dev/dri --group-add video --cap-add=SYS_PTRACE --security-opt seccomp=unconfined -v $PWD/yolov7_migraphx:/home/yolov7_migraphx -it <Your Image ID> /bin/bash
数据集
根据提供的样本数据,进行目标检测。
推理
Python版本推理
下面介绍如何运行Python代码示例,Python示例的详细说明见Doc目录下的Tutorial_Python.md。
设置环境变量
export PYTHONPATH=/opt/dtk/lib:$PYTHONPATH
安装依赖
# 进入python示例目录
cd <path_to_yolov7_migraphx>/Python
# 安装依赖
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
运行示例
YoloV7模型的推理示例程序是YoloV7_infer_migraphx.py,在Python目录下使用如下命令运行该推理示例:
python YoloV7_infer_migraphx.py \
--imgpath 测试图像路径 \
--modelpath onnx模型路径 \
--objectThreshold 判断是否有物体阈值,默认0.5 \
--confThreshold 置信度阈值,默认0.25 \
--nmsThreshold nms阈值,默认0.5 \
C++版本推理
下面介绍如何运行C++代码示例,C++示例的详细说明见Doc目录下的Tutorial_Cpp.md。
构建工程
rbuild build -d depend
设置环境变量
将依赖库依赖加入环境变量LD_LIBRARY_PATH,在~/.bashrc中添加如下语句:
export LD_LIBRARY_PATH=<path_to_yolov7_migraphx>/depend/lib64/:$LD_LIBRARY_PATH
然后执行:
source ~/.bashrc
运行示例
成功编译YoloV7工程后,执行如下命令运行该示例:
# 进入yolov7 migraphx工程根目录
cd <path_to_yolov7_migraphx>
# 进入build目录
cd ./build/
# 执行示例程序
./YOLOV7
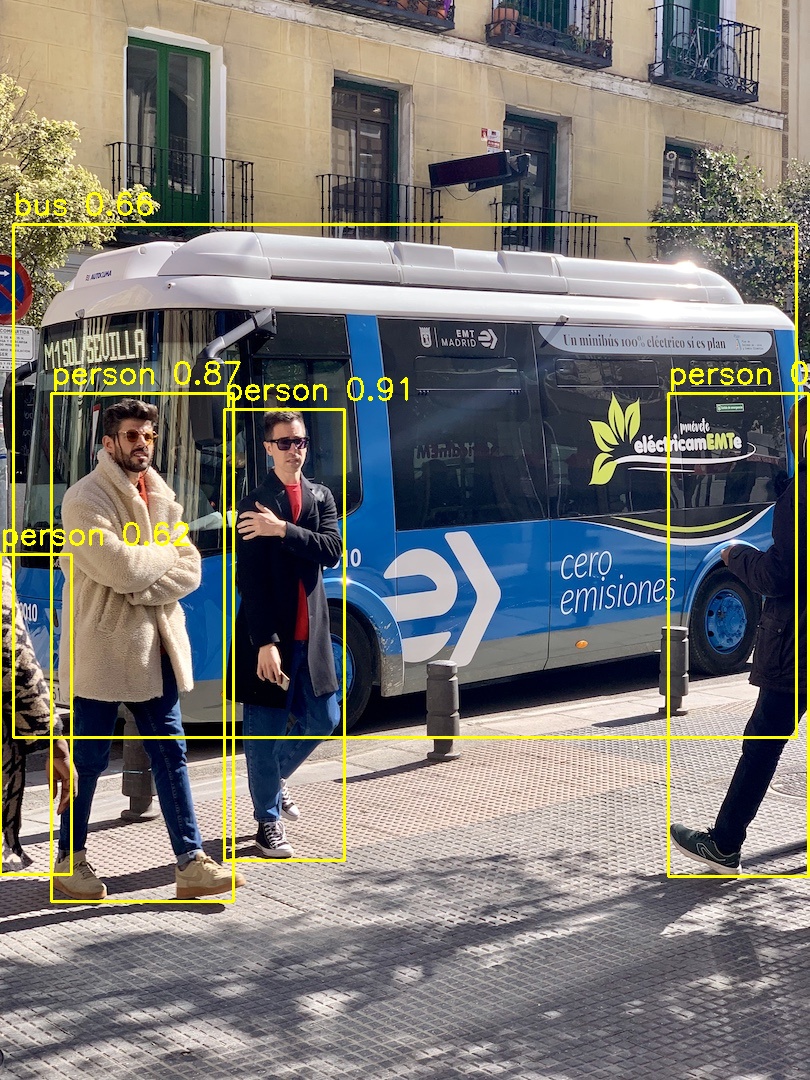
result
Python版本
python程序运行结束后,会在当前目录生成目标检测图像。
C++版本
C++程序运行结束后,会在build目录生成目标检测图像。
精度
无
应用场景
算法类别
目标检测
热点应用行业
交通,教育,化工
源码仓库及问题反馈
ModelZoo / YoloV7_migraphx · GitLab
















 290
290











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











