






文章目录
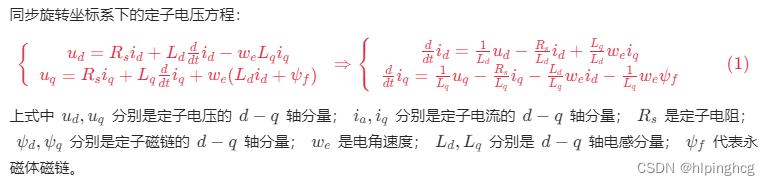
1、定子电压方程
2、电磁转矩方程

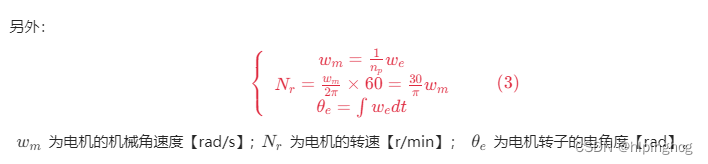
3、电角度、机械角速度、电角速度
4、机械运动方程

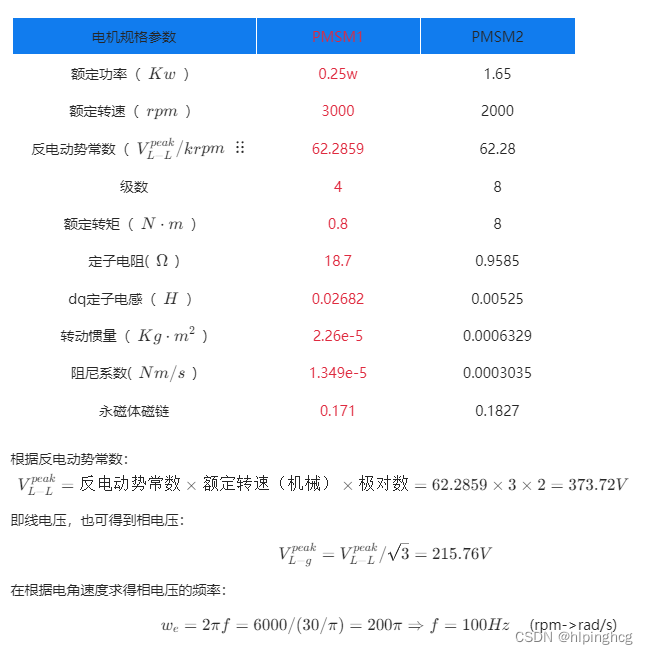
5、电机参数
6、模型搭建
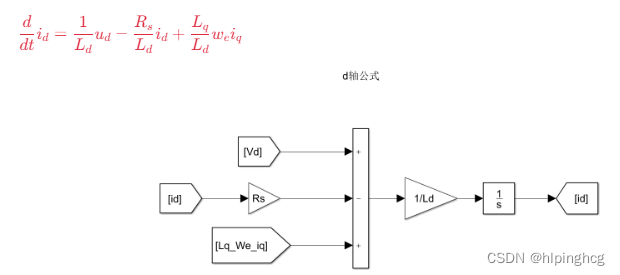
6.1 d轴公式
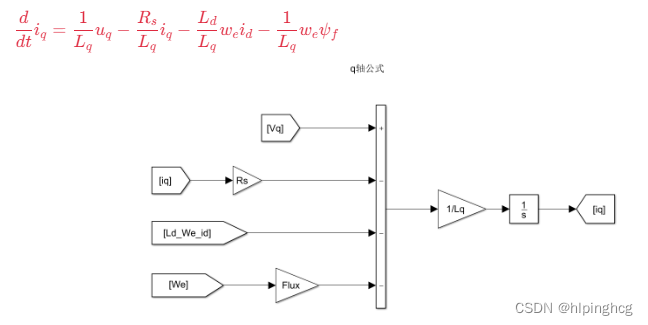
6.2 q轴公式
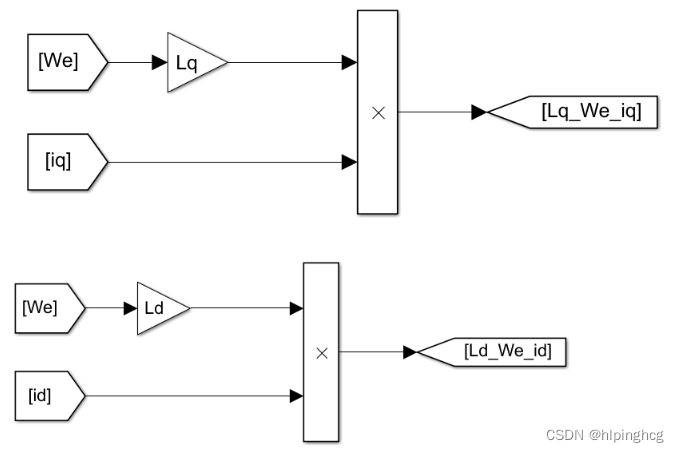
6.3 耦合项
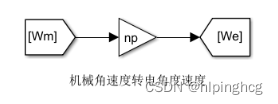
6.4 电角速度【rad/s]
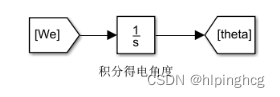
6.5 电角度[rad]
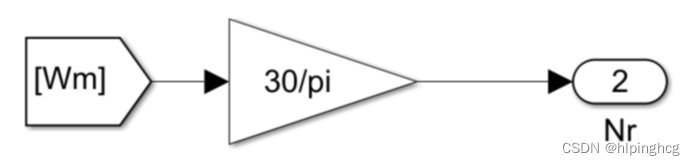
6.6 转速【rpm】
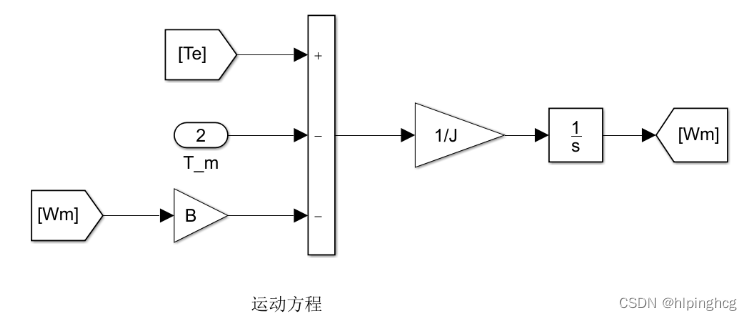
6.7 运动方程
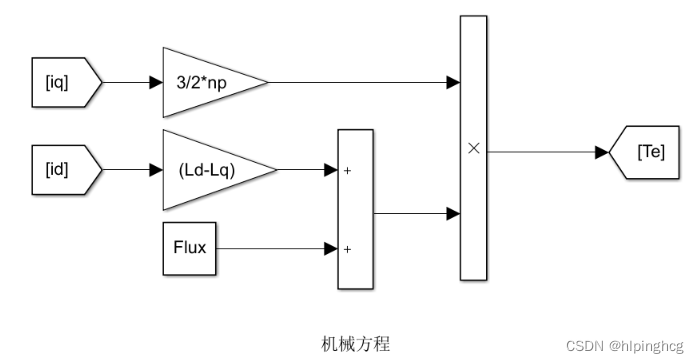
6.8 机械方程
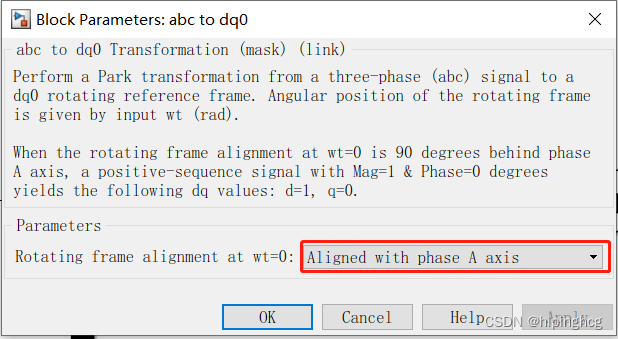
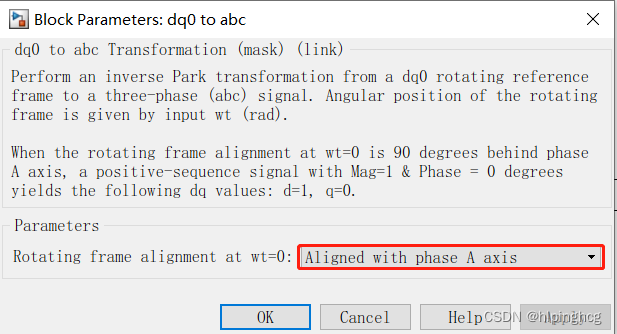
6.9 坐标转换
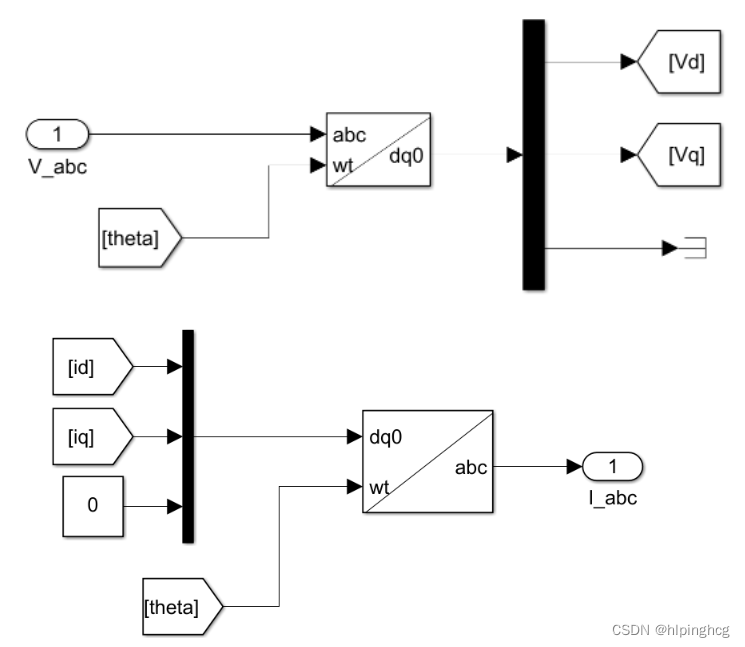
以上图中的【Vd】、【Vd】、【id】、【iq】的顺序不可反,且必须是三项。
其中坐标转换的零角度都是以a轴为基准。
6.10 模型使用和验证
参数文件:
Rs=18.7;
Ld=0.02682;
Lq=0.02682;
np=2;
J=2.26e-5;
B=1.349e-5;
Flux=0.171;
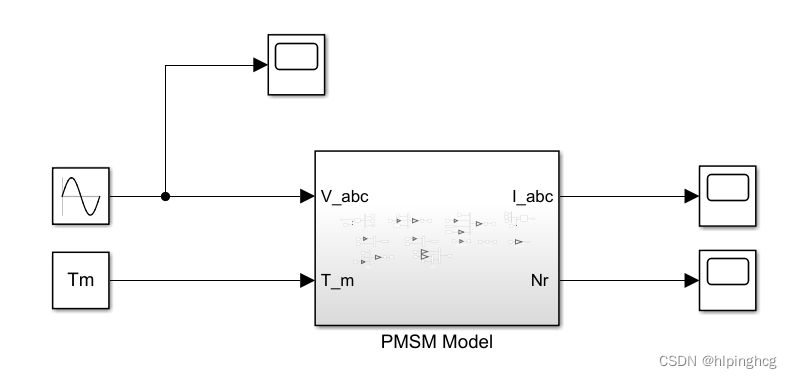
6.1-6.9的模型部分都放在subsystem中,取名PMSM_Model如下图:
其中给的正弦波为三相互差120°电压,设置如下:
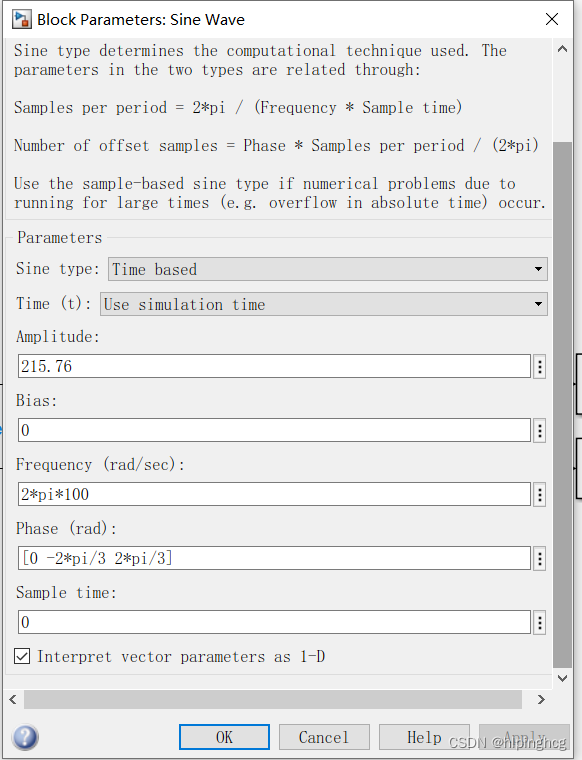
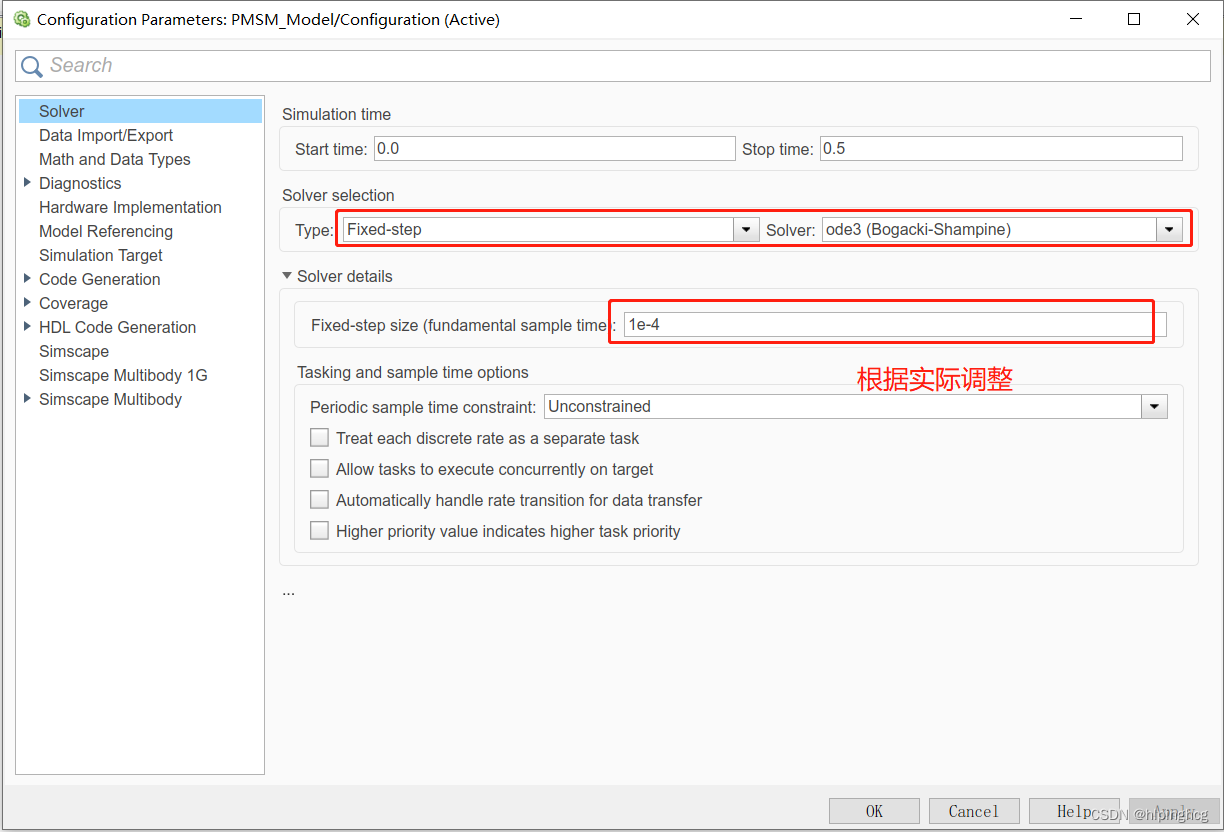
精确度还需调整,不然显示的正弦波形就是三角波。
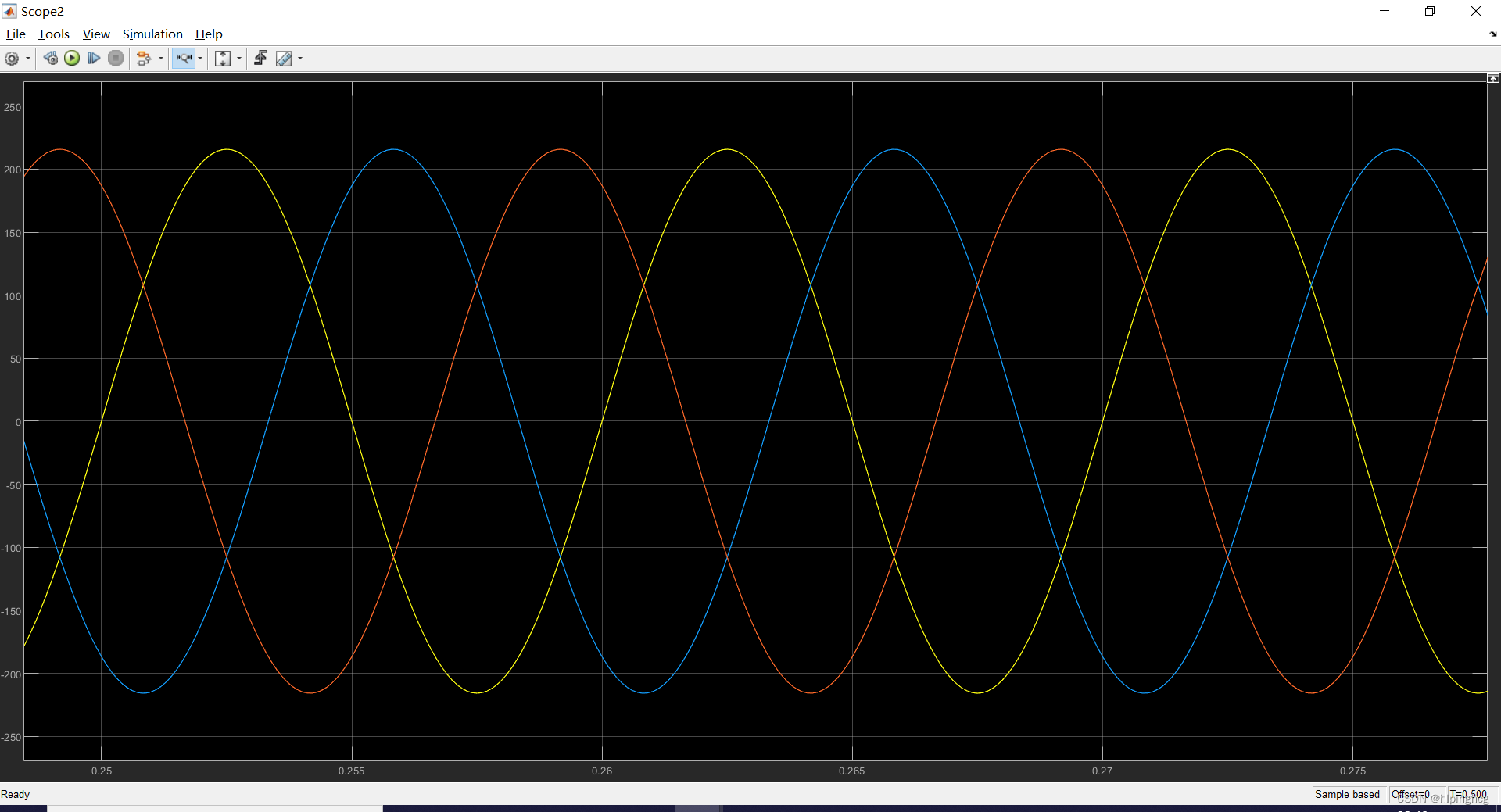
 实际输入的电压波形:
实际输入的电压波形:
实际输出的波形:
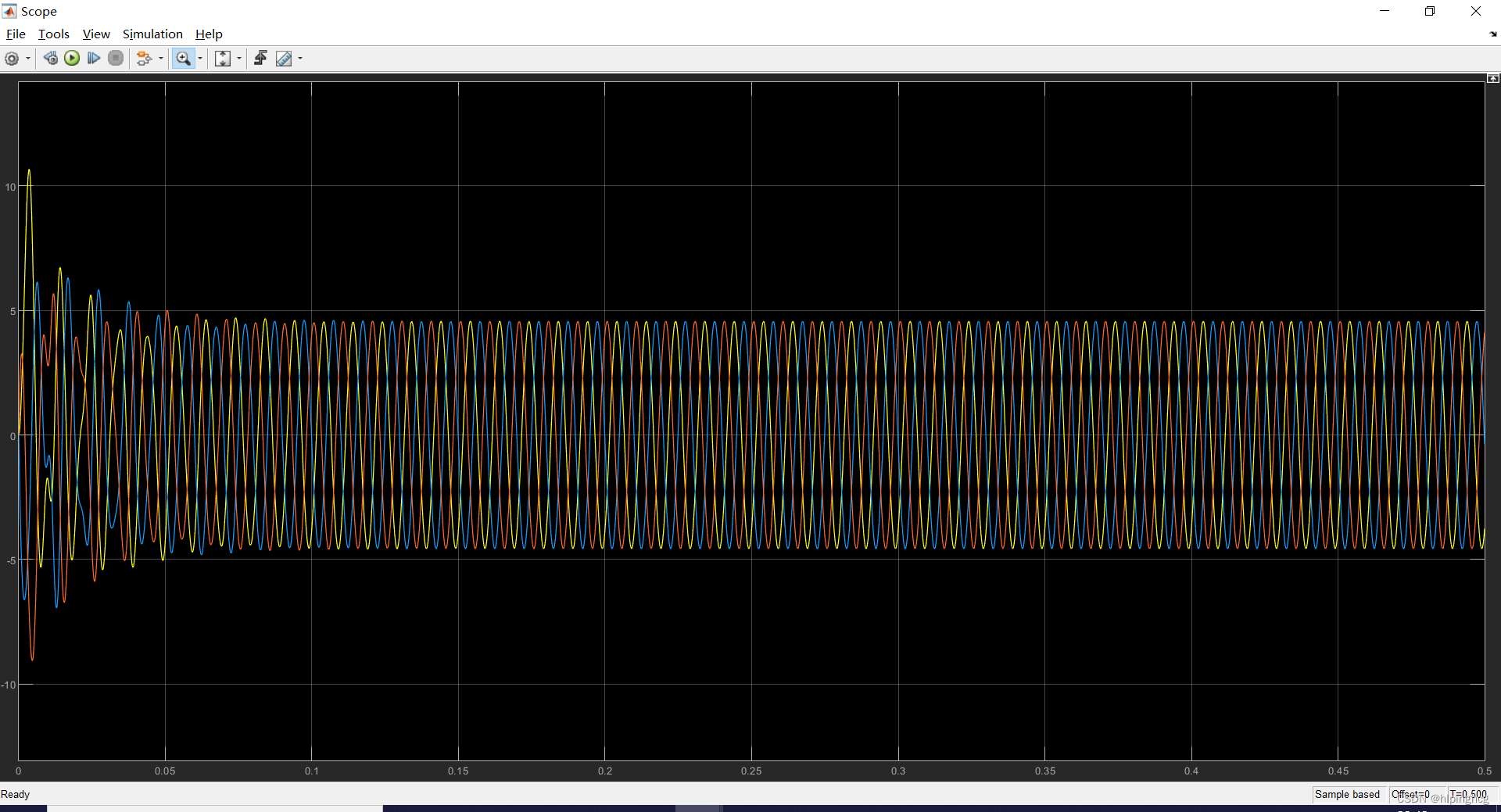
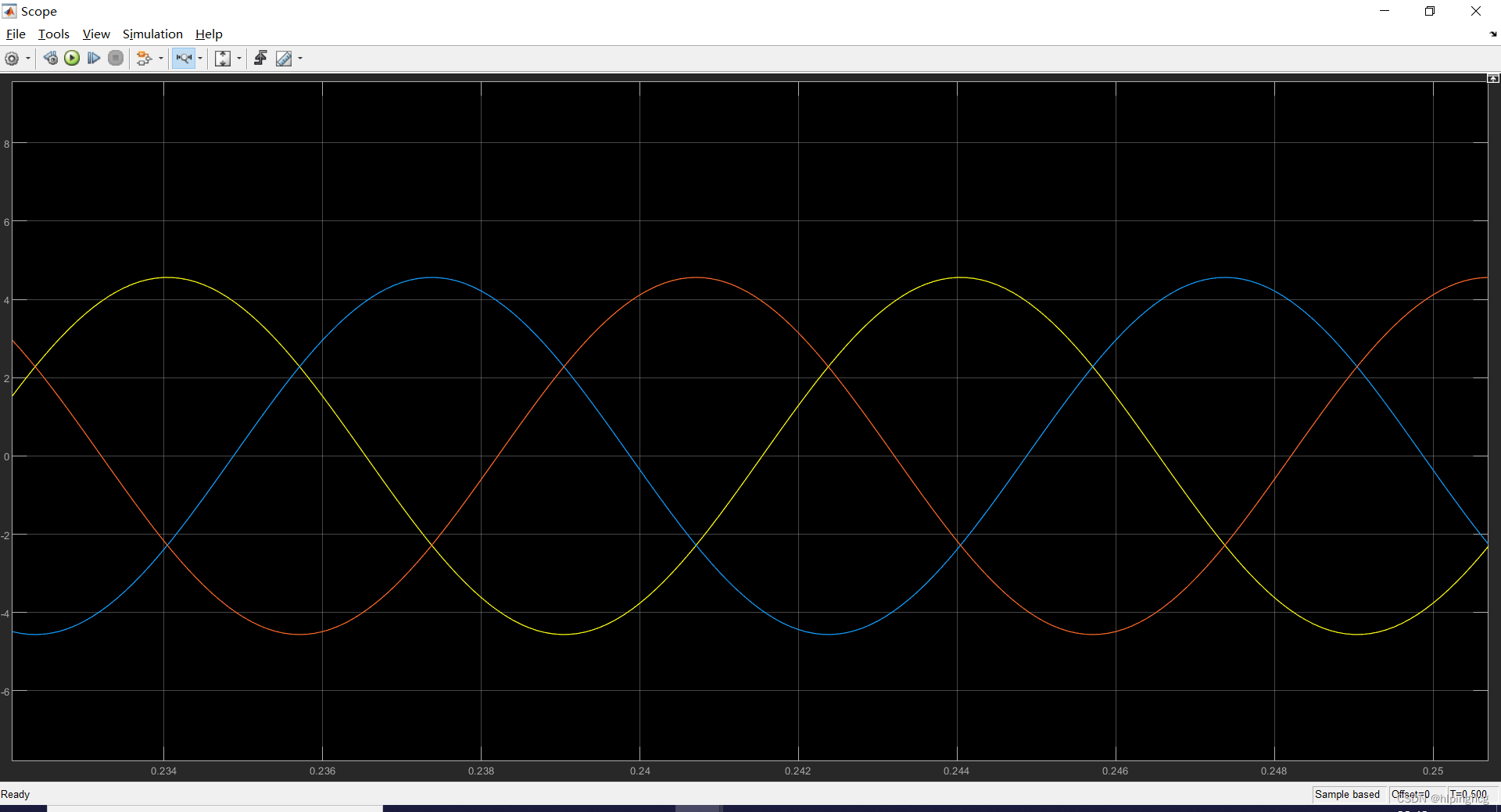
与输入的电压频率一致。
实际输出转速:
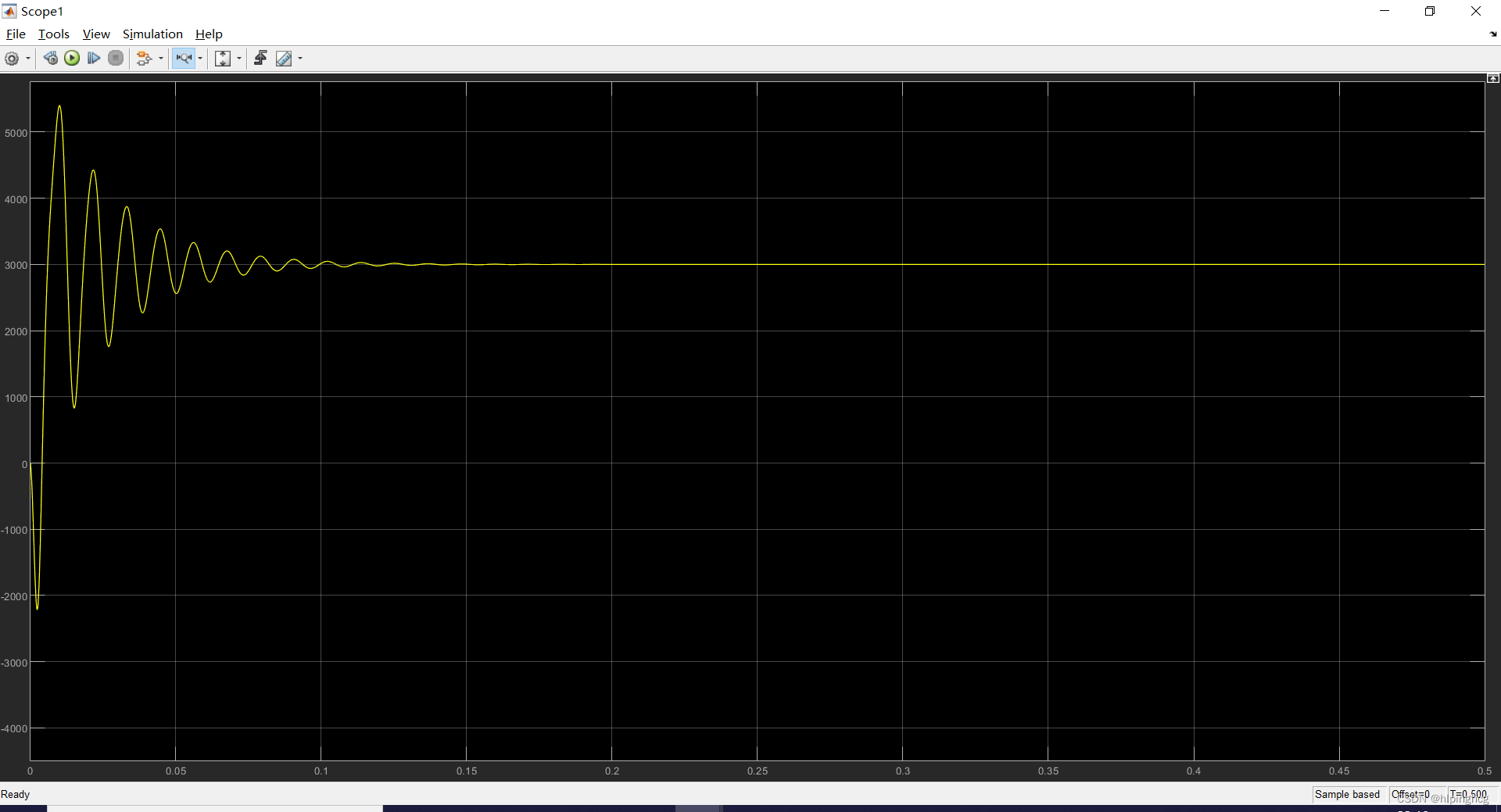
3000rpm与额定一致。
模型下载地址:
https://download.csdn.net/download/qq_28149763/88485986



















 891
891

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











