







1、电路图
在百度搜索了下
三相全控整流电路,输出直流电压脉动较小,输出容量较大。
当改变延时触发角时,输出电压平均值改变。
晶闸管的特性:
1、承受反向电压时,不论门极是否有触发,都不导通。
2、承受正向电压时,只有在门极被有效触发时,才导通。
3、导通情况下,只要有一定的正向阳极电压,不论门极如何电压如何,都是导通状态。
4、导通情况下,当主回路电压或电流减小到接近于零,晶闸管关断。
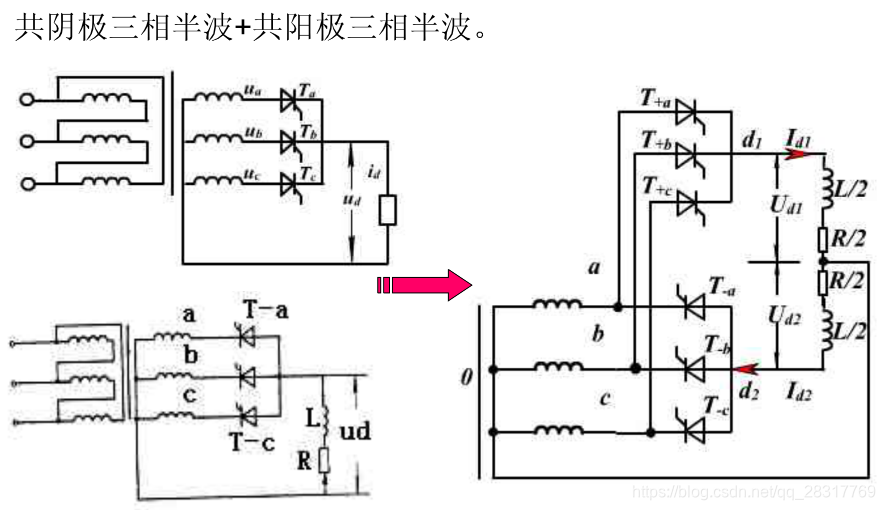

一般变压器一次侧三角型接法,二次侧星型。
图中1、3、5的阴极连接在一起成共阴极组(在正半周触发),同理4、6、2是共阳极组(在负半周触发)。
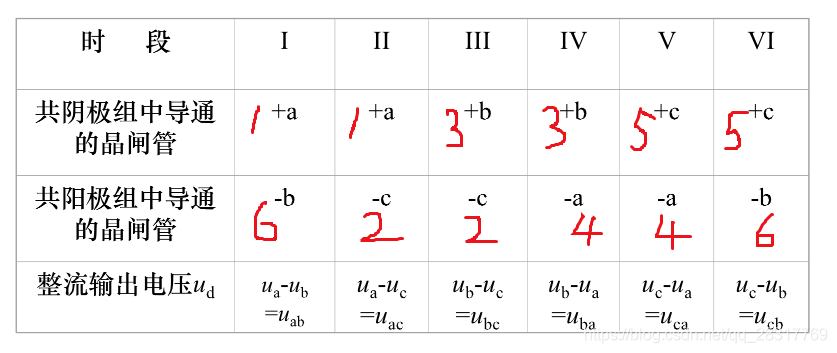
习惯上,导通顺序(分析方便): 1 2 3 4 5 6 ,相位依次差60度,因此如图布置6个晶闸管
在第一时段,a电压最高,共阴极组的1号导通,b最低,共阳极组的6导通。在负载上的整流电压是uab
经过60度,来到第二时段,a还是最高,1号继续通,c变成最低,2号触发导通(电流从b相换到c相),6号承受反向电压而关闭。
2、控制角=0时,阻性负载工作情况
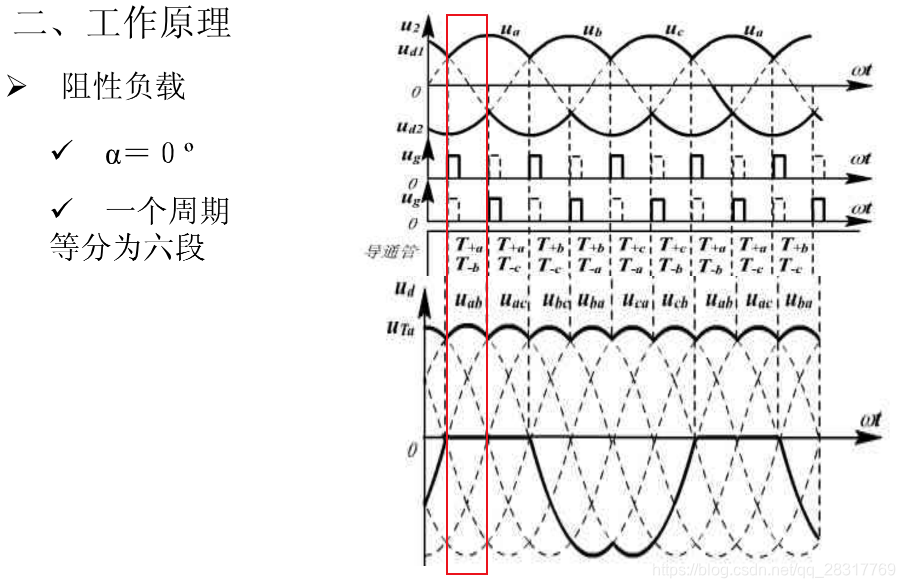
在自然换相点(相电压的交点与线电压的交点在同一角度位置上)换相(红色框内,作为第一个时段,第一个换相点也作为触发角的起点),ua电压开始大于ub、uc电压,此时是晶闸管1和6触发。
三相交流电波形图:阴极所接电压最低的一个导通,阳极所接电压最大的一个导通。
任何时刻,共阳极组提供一个晶闸管导通,共阴极组提供一个晶闸管导通,且不是同相上的晶闸管,形成回路(同时加触发脉冲)。
当延时角=0时,输出电压Ud一周期内的波形是6个线电压的包络线(波头部uab等,线电压一部分),整流电压在一个周期内脉动六次,所以称六脉动整流电路(三相半波整流称3脉动),50HZ * 6 = 300HZ(对于工频电源的脉动频率)。
输出电压6次脉动波形,每隔60度重复出现一次,所以计算输出电压平均值在60度内取平均值就可以了。
可控硅承受线电压的峰值。在1和6导通时,3和4承受反向线电压uba,2号承受反向线电压ubc,5号承受反向线电压uca。
又到一个换相点(此换相点在负方向) ,1和2触发。
3、控制角>0时,阻性负载工作情况
大于0,Ud波形出现缺口,并随着延时角的增大而增大,输出电压平均值降低。
电阻性负载时,延时角=120时,输出电压为0,移相范围0-120度。
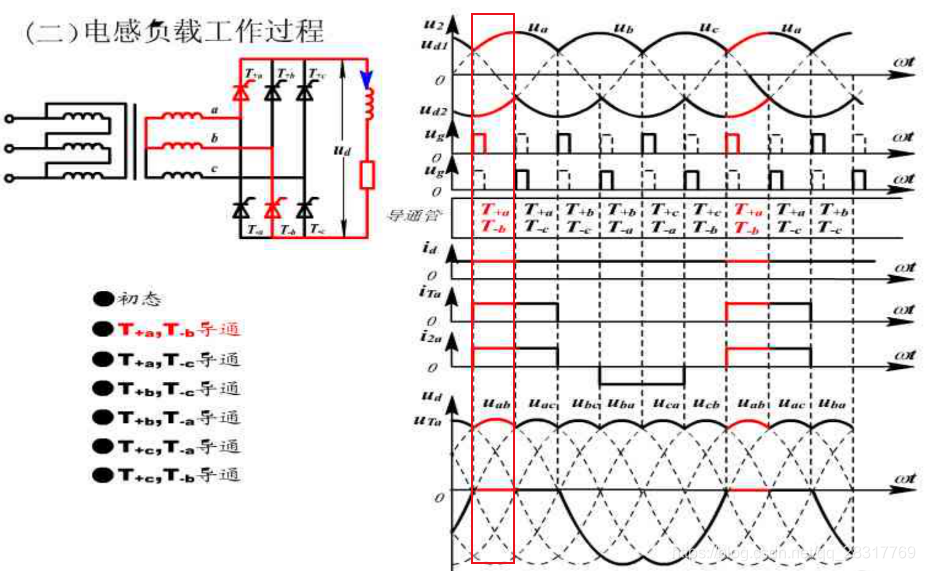
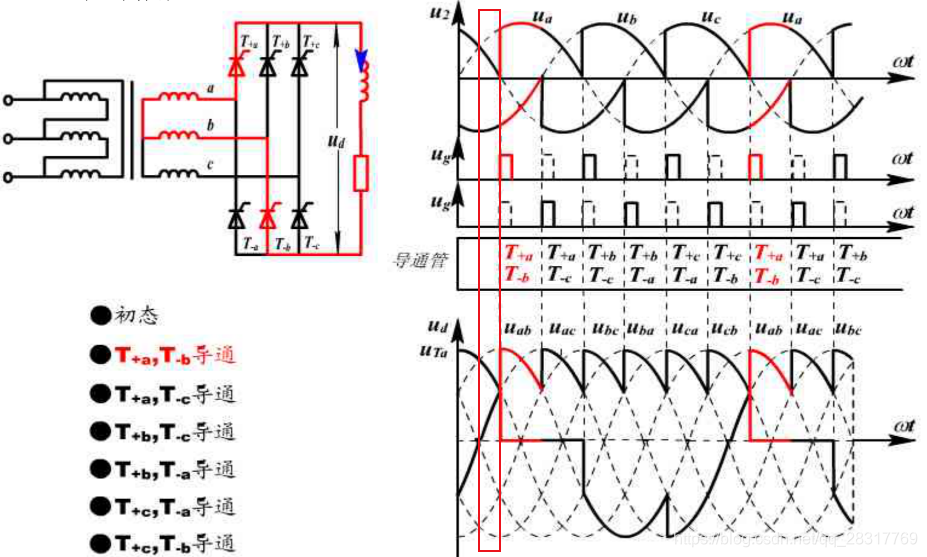
4、控制角=0时,阻感性负载工作情况
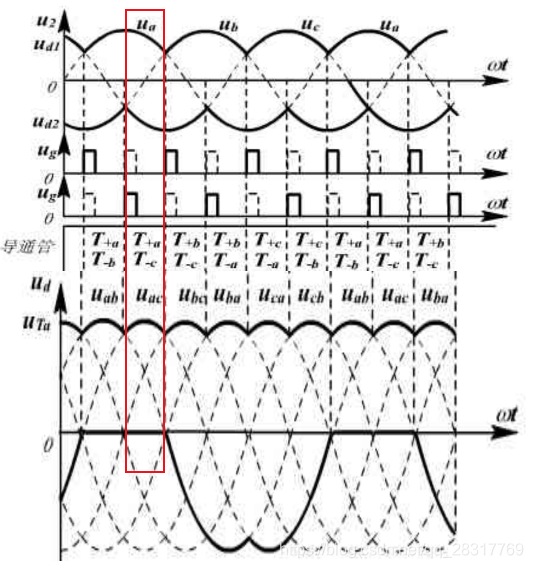
5、控制角=30时,阻感性负载工作情况
大红框部分的代表延时30度
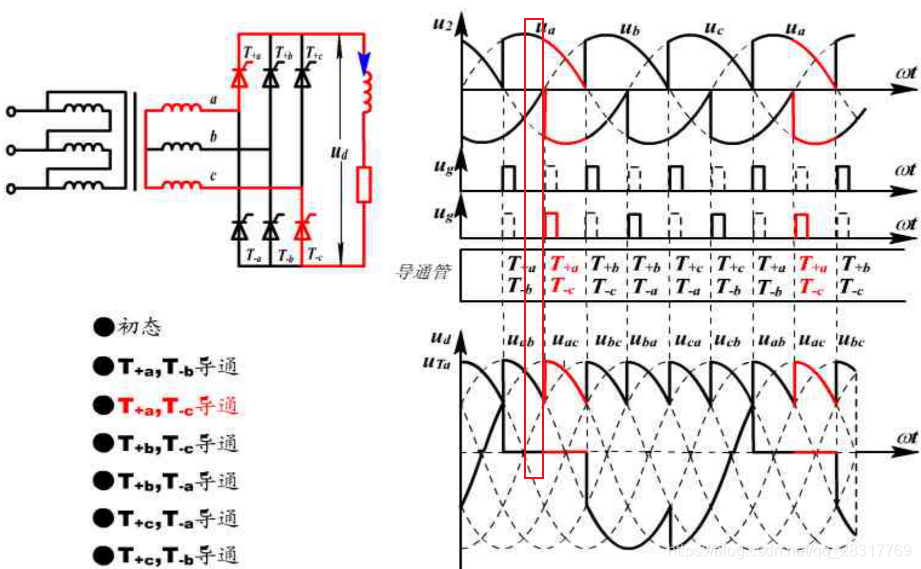
大红框部分的代表延时30度
控制角=30时,每个晶闸管都是从自然换相点后移30度才开始换相。输出线电压uac时,经过a相和b相的自然换相点,虽然b的电压开始大于a相,但是3号晶闸管没有在换相点触发,因此uac继续输出电压。
6、控制角=60时,阻感性负载工作情况

大红框代表延60度。
7、控制角=90时,阻感性负载工作情况
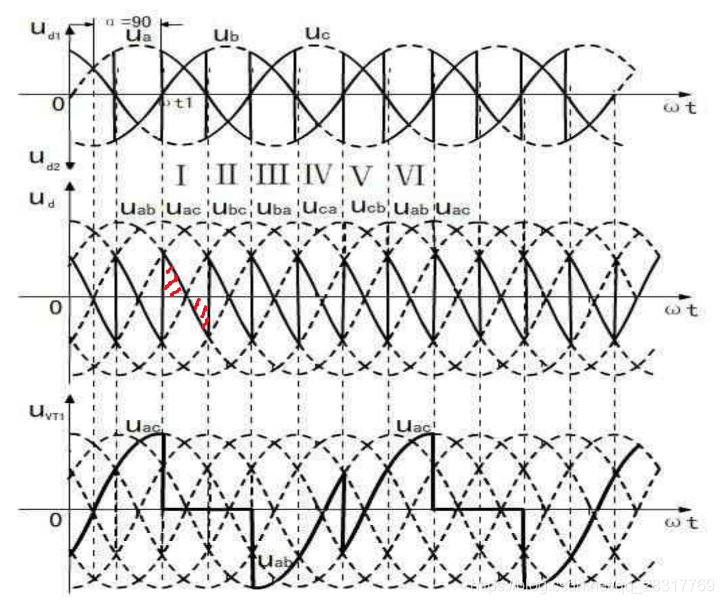
输出电压平均值为0
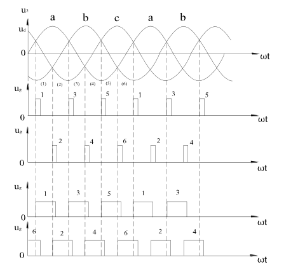
8、触发脉冲
双脉冲触发:在触发1号晶闸管的时候,同时给6号晶闸管补发一个脉冲,相当于两个窄脉冲替代大于60度的宽脉冲。

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









