






摘要
大语言模型 (LLM) 已在不同领域展现出卓越的推理能力。最近的研究表明,增加测试时计算可增强 LLM 的推理能力。这通常涉及在外部 LLM verifier的指导下在推理时进行大量采样,从而形成 two-player 系统。尽管有外部指导,但该系统的有效性证明了单个 LLM 解决复杂任务的潜力。因此,我们提出了一个新的研究问题:我们能否内化搜索能力,从根本上增强单个 LLM 的推理能力?这项工作探索了一个正交方向,重点关注训练后 LLM 的自回归搜索(即具有自我反思和自我探索新策略的扩展推理过程)。为了实现这一目标,我们提出了行动-思维链 (Chain-of-Action-Thought, COAT) 推理和一个两阶段训练范式:1) 小规模格式微调阶段,以内化 COAT 推理格式;2) 利用强化学习的大规模自我改进阶段。我们的方法产生了 Satori,一个基于开源模型和数据进行训练的 7B LLM。大量的实证评估表明,Satori 在数学推理基准上实现了最先进的性能,同时在领域外的任务中表现出很强的泛化能力。代码、数据和模型将完全开源。
1.介绍
大语言模型 (LLM) 在各种推理任务中都表现出色,包括数学问题、编程和逻辑推理。实现这些强大推理能力的关键技术之一是思维链 (CoT) 提示,它允许 LLM 通过生成一系列中间推理步骤来解决复杂任务。因此,许多早期的努力都集中在使用大规模、高质量的 CoT 推理链对 LLM 进行微调,无论是通过人工标注还是通过从更高级的模型中提取合成数据。然而,人工标注极其耗费人力,而蒸馏通常会将模型的推理能力限制到一定水平。
除了扩大训练资源外,最近的研究还集中在测试时扩展上,即分配额外的推理时间计算来搜索更准确的解决方案。这通常涉及大量采样,要么生成多个完整解决方案,要么采样多个中间推理步骤。这些方法通常需要外部反馈来指导搜索过程,通常是通过训练辅助奖赏模型来评估最终解决方案或中间步骤。然而,这种 two-player 框架会产生更多的模型部署成本,并且无法将搜索功能内化到单个 LLM 中。
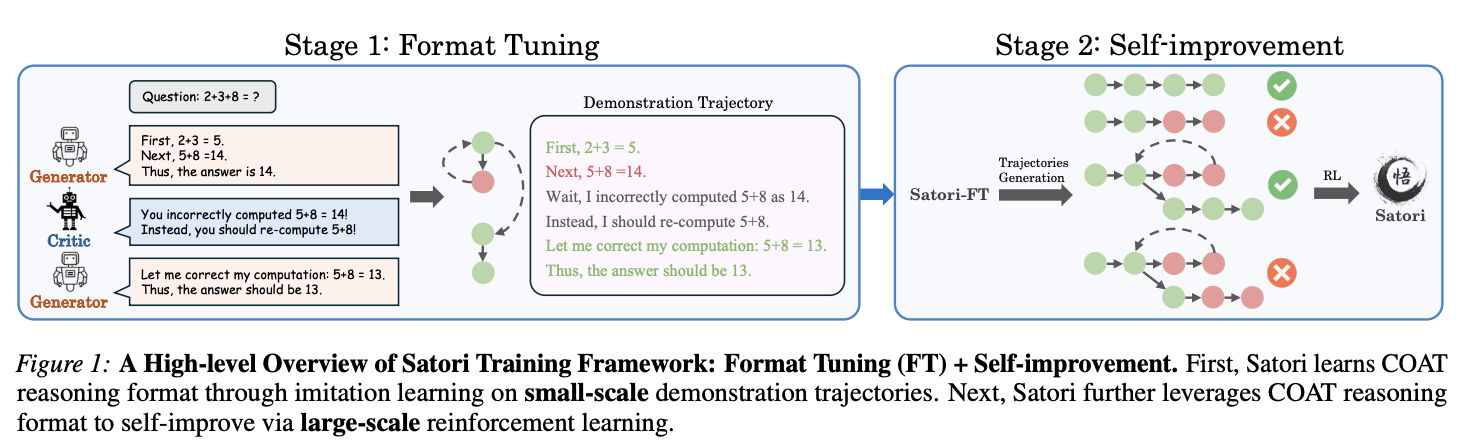
与上述工作正交的是,我们的研究探索了一个新方向,使 LLM 具有自回归搜索功能,即具有自我反思和自我探索新策略的扩展推理过程。具体来说,我们引入了行动-思维链 (Chain-of-Action-Thought, COAT) 机制,使 LLM 能够在解决问题时采取各种元行动。与由大规模有监督微调 (SFT) 和从人类反馈中强化学习 (RLHF) 组成的传统后训练不同,我们提出了一种新的两阶段训练范式:(1) 小规模格式微调 (FT) 阶段,以内化 COAT 推理格式;(2) 大规模自我改进阶段,利用强化学习和“重启和探索”(RAE) 技术。我们的方法促成了 Satori 的开发,这是一个 7B LLM,在开源基础模型和数学数据上进行训练,在领域内和领域外任务上均取得了卓越的表现。总而言之,我们的贡献有三方面,
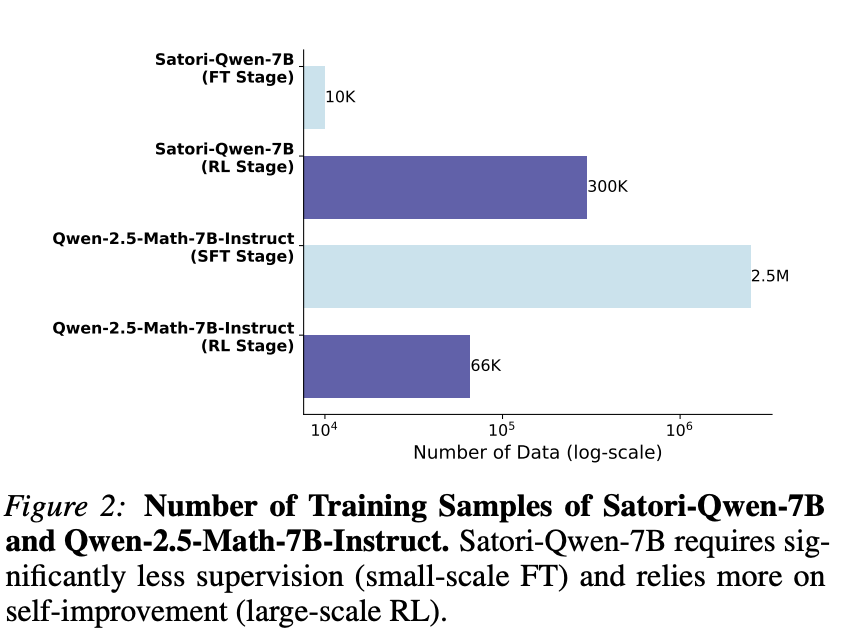
- Efficiency。Satori 是一个单一的 LLM,能够在没有外部指导的情况下进行自回归搜索(第 6 节和第 A 节)。而且,这是通过最少的监督和大规模的自我改进实现的。
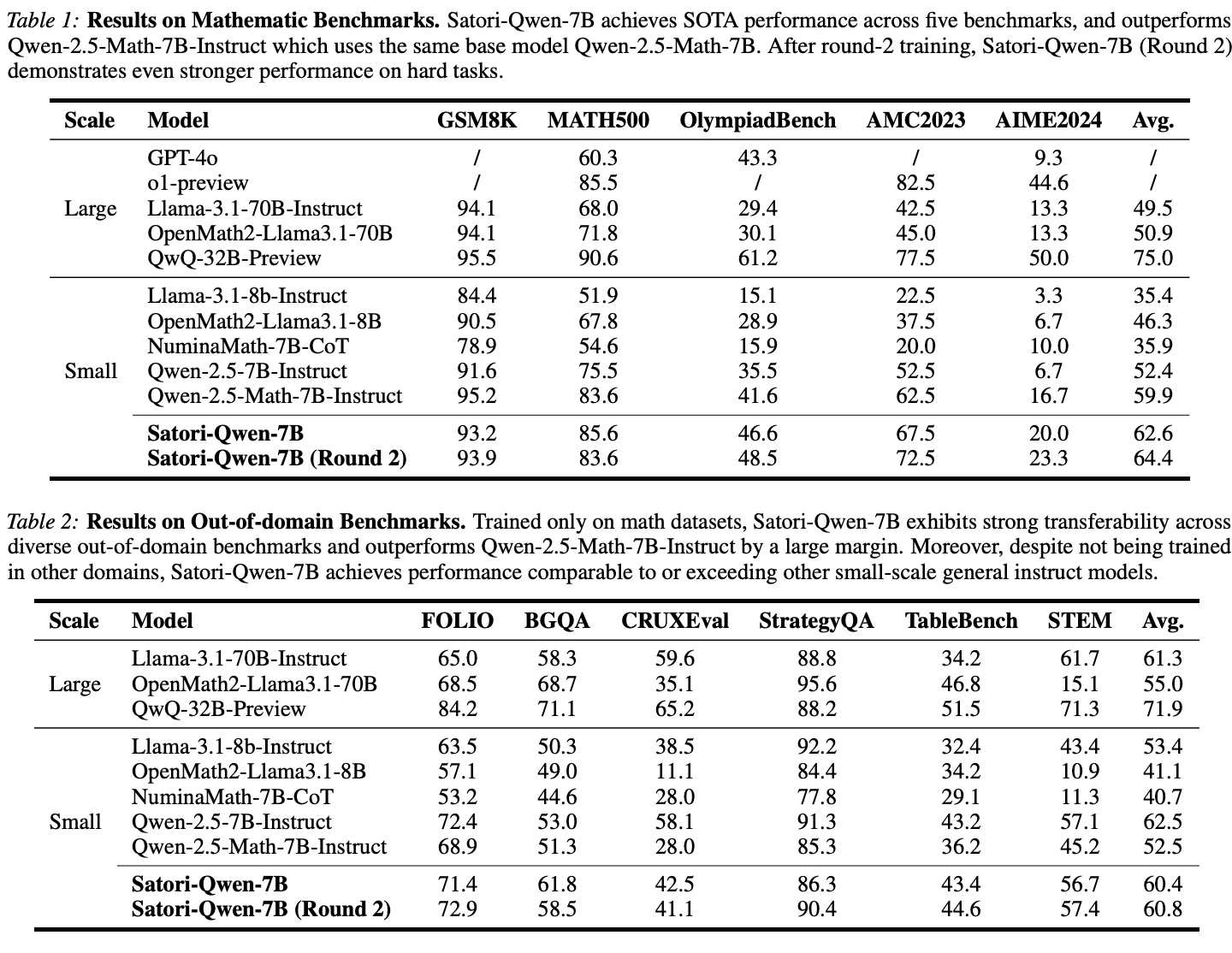
- Effectiveness。Satori 在领域内数学推理任务中表现出优异的性能,并且优于基于相同 base 模型构建的指令模型(第 5.1 节)。
- Generalizability。与最近的数学推理研究不同,Satori 表现出对领域外任务的强大可迁移性,并展示了自我反思和自我探索的通用能力(第 5.2 节)。
2. Related Work
我们总结了与本文范围密切相关的文献(更多讨论请参阅 B 部分)。
Concurrent Work。基于 OpenAI o1 的影响,研究界做出了巨大努力,以增强具有高级推理能力的开源 LLM。最常见的方法依赖于从更强大的教师模型中提取知识。相比之下,Satori 从强化学习 (RL) 的角度解决了这个问题,并且只需要最少的有监督数据(格式微调阶段仅需 10K 个样本)。最相关的并行工作是 DeepSeek 最近发布的 R1,它采用了类似的高级策略,即小规模冷启动 SFT,然后进行大规模 RL 训练。虽然这两项工作在这个高级思想上是一致的,但我们的工作在关键方法上与 R1 不同,包括数据合成框架和 RL 算法。此外,DeepSeek-R1 专注于训练大规模 LLM(671B),而我们的工作为开发用于研究目的的小规模 LLM(7B)提供了见解。最后,作为业界开发的模型,DeepSeek-R1 的技术细节尚未完全公开,因此很难复制,而我们的工作是一项完全透明的研究,旨在开源训练数据和训练方案。
Post-training LLMs for Reasoning。最近的进展集中在广泛的后训练上,以增强推理能力。一些研究专注于构建高质量的指令微调数据集,但标注成本昂贵。最近的研究集中在自我改进方法上,其中模型使用自己生成的数据进行训练。此外,强化学习方法,特别是基于近端策略优化 (PPO) 的方法,已被证明更有效,它们通常利用奖赏模型来指导学习过程。
Enabling LLMs with Searching Abilities。基于提示的方法引导 LLM 通过纠错和探索替代路径来寻找解决方案。然而,这种方法不能从根本上增强 LLM 的推理能力。此外,最近的研究指出了 LLM 在自我纠正方面的困难。最近的研究转向训练 LLM 进行自我探索。一些研究专注于实现轨迹级搜索——迭代地识别以前完整响应中的错误并产生改进的响应。另一条研究路线探索了步骤级搜索,这使 LLM 能够以更细粒度的方式识别和纠正错误。一些人使用另一个模型提供步骤级反馈来实现这一点,但这种 two-player 框架的模型部署成本很高。SoS 是另一项密切相关的工作,它试图训练单个 LLM 以扁平字符串的形式执行树搜索。然而,SoS 的有效性主要体现在简单的符号任务上,其推广到更复杂问题的能力仍有待探索。
3. Preliminaries
我们通过训练语言模型
π
θ
π_θ
πθ 来解决数学问题,给定问题提示
x
\textbf x
x,生成与基本事实
y
∗
\textbf y^*
y∗ 匹配的解决方案
y
~
\tilde {\textbf y}
y~。所有序列
x
,
y
\textbf x, \textbf y
x,y 和
y
∗
\textbf y^∗
y∗ 都由预定词表中的 token 组成。由于我们的方法使用强化学习 (RL) 来训练解决数学问题的模型,我们在下面概述了关键的 RL 概念。
Reinforcement Learning (RL)。RL 涉及 Agent 通过与环境的交互做出连续决策,以最大化期望累积奖赏。在这里,语言模型
π
θ
π_θ
πθ 充当 Agent 的策略。从初始状态
z
0
z_0
z0 开始,在每个步骤
l
l
l,Agent 观察当前状态
z
l
z_l
zl,获得奖励
r
l
r_l
rl,根据
π
θ
π_θ
πθ 选择动作,转换到下一个状态
z
l
+
1
z_{l+1}
zl+1,并继续直到到达终止状态。轨迹是此交互过程中的状态和动作序列。RL 优化策略以最大化期望奖赏
′
∑
l
=
1
L
r
l
'\sum^L_{l=1} r_l
′∑l=1Lrl,其中
L
L
L 是轨迹长度。
4. Method
本节我们将介绍推理的形式,以及如何将推理形式化为一个序列决策问题。Goal:我们希望训练 LLM 通过多步骤推理来解决问题,而不是直接预测最终答案。给定问题陈述
x
\textbf x
x,模型将生成一系列推理步骤
{
y
1
,
y
2
,
.
.
.
,
y
L
}
\{\textbf y_1, \textbf y_2, . . . , \textbf y_L\}
{y1,y2,...,yL},其中
y
L
\textbf y_L
yL 提供最终答案。但是,并非所有中间步骤都有用——重复错误并不能提高准确性。有效的推理需要验证正确性、识别错误并考虑替代解决方案。例如,给定
x
=
“
1
+
1
=
?
”
x =“1 + 1 =?”
x=“1+1=?”,模型可能最初输出
y
1
=
3
\textbf y_1 = 3
y1=3,然后在
y
2
\textbf y_2
y2 识别到错误(例如,“Wait, let me verify…””),然后将其更正为
y
3
=
2
\textbf y_3 = 2
y3=2。
Chain-of-Action-Thought reasoning (COAT)。关键挑战是让模型能够在没有外部干预的情况下确定何时反思、继续或探索替代方案。为了实现这一点,我们引入了特殊的元操作 token,用于指导模型的推理过程,而不仅仅是标准文本生成。这些 token 可作为提示,让模型在继续之前确定何时重新评估其推理。
- Continue Reasoning (<|continue|>):鼓励模型通过生成下一个中间步骤来构建其当前的推理轨迹。
- Reflect (<|reflect|>):提示模型暂停并验证先前推理步骤的正确性。
- Explore Alternative Solution (<|explore|>):向模型发出信号,以识别其推理中的关键缺陷并探索新的解决方案。
每个推理步骤
y
l
\textbf y_l
yl 都是一个 token 序列,起始 token 可能是指定的元动作 token 之一。我们将此公式称为动作-思维链推理 (COAT)。具体而言,典型的思维链推理 (CoT) 可视为 COAT 的一个特例,其中 CoT 中的每个推理步骤都仅限于 <|continue|>,而不明确包含其他类型的元动作。
Learning to Reason via RL。我们将推理表述为一个序列决策问题,其中推理是一个逐步构建和细化答案的过程。具体来说,模型
π
θ
π_θ
πθ 从输入上下文
x
x
x(初始状态
z
0
z_0
z0)开始,生成推理步骤
y
l
\textbf y_l
yl(动作),通过附加
y
l
y_l
yl来更新上下文(下一个状态
z
l
+
1
=
z
l
⊕
y
l
z_{l+1} = z_l⊕\textbf y_l
zl+1=zl⊕yl,其中
⊕
⊕
⊕表示字符串连接),并重复此过程,直到产生最终答案
y
L
\textbf y_L
yL。当模型发出完成信号(例如,EOS token)时,推理终止。最简单的奖赏函数可以是
I
{
y
L
=
y
∗
}
\mathbb I\{\textbf y_L = \textbf y^∗\}
I{yL=y∗},评估最终答案
y
L
\textbf y_L
yL 是否与基本事实
y
∗
\textbf y^∗
y∗ 匹配。有了这个公式,我们可以训练模型使用RL进行推理,旨在生成最大化期望奖赏的推理步骤。然而,将RL应用于推理有两个关键挑战:
- Unawareness of meta-action tokens:该模型不理解特殊 token 的用途,也未能认识到遇到特殊元动作 token 可能需要反思或提出替代方案。
- Long horizon and sparse rewards:推理需要长期决策,而奖赏只在最后,这阻碍了学习效果。模型必须采取许多正确的推理步骤才能获得奖赏,而失败会迫使它从初始状态(即问题陈述)重新开始。这让学习变得困难,因为与奖赏相关的训练数据很少,但奖赏对于推动强化学习进步至关重要。
Overview of Proposed Method。为了解决模型最初对元动作 token 的不了解,我们引入了一个热身“格式微调”阶段:我们在一个包含一些已证明的推理轨迹的小型数据集上对预训练的 LLM 进行微调(第 4.1 节)。此步骤使模型熟悉使用和响应元动作 token。其次,为了应对长期和稀疏奖赏的挑战,我们提出了一种“重启和探索”(RAE)策略,灵感来自 Go-explore。在这里,模型从中间步骤重新启动,包括以前推理尝试失败的那些点,使其能够专注于纠正错误而不是从头开始。我们还添加了探索奖赏以鼓励更深入的反思,进一步增加模型得出正确答案的机会(第 4.2 节)。
4.1. Format Tuning Through Imitation Learning
训练基础 LLM π θ π_θ πθ 来执行 COAT 推理是一项重大挑战:LLM 通常不会在包含试错的 COAT 推理数据上进行预训练,因此需要一个后训练阶段来注入此功能。为了解决这个问题,我们引入了格式微调 (FT),这是一种旨在通过模仿学习训练 LLM 模拟专家 COAT 轨迹的方法。模仿学习技术广泛应用于机器人领域,其中使用人类专家提供的演示轨迹来训练 Agent。但是,对于复杂任务而言,为 LLM 生成高质量的演示轨迹成本过高。为了有效地构建演示轨迹数据集 D s y n = { ( x ( i ) , y ~ ( i ) ) } i = 1 N \mathcal D_{syn} = \{(\textbf x^{(i)}, \tilde {\textbf y}^{(i)})\}^N_{i=1} Dsyn={(x(i),y~(i))}i=1N,我们提出了一个利用三个 LLM 的多 Agent 数据合成框架:
- Generator:给定一个输入问题,生成器 π g π_g πg 使用经典的CoT技术为给定的输入问题生成多条推理路径。
- Critic:Critic π c π_c πc评估生成器生成的推理路径的正确性,提供反馈以改进推理并解决次优步骤。
- Reward Model:此外,奖赏模型 π r π_r πr 为细化的推理路径分配分数,并选择最有效的路径作为最终的演示轨迹。
这三个模型协作构建了高质量的演示轨迹(轨迹合成的详细信息见附录 C)。对于这项工作,我们采用最简单的模仿学习方法,即行为克隆,该方法利用有监督微调在专家 COAT 演示轨迹 D s y n \mathcal D_{syn} Dsyn 上训练 LLM 策略。值得注意的是,我们观察到,即使数量较少(10K)的 COAT 演示轨迹也足以使 π θ π_θ πθ 有效遵循 COAT 推理格式。
4.2. Self-improvement via Reinforcement Learning
在格式微调后,LLM 策略
π
θ
π_θ
πθ 采用了 COAT 推理风格,但难以推广,特别是在使用元动作进行自我反思时。这种限制源于格式微调期间样例的稀缺。虽然收集更多样例可能会有所帮助,但这样做成本高昂且耗时。相反,我们探索模型是否可以通过 RL 自我改进其推理。
我们从格式微调后的 LLM 开始,使用广泛使用的 RL 方法 PPO 算法对其进行训练。除了对数据集
D
\mathcal D
D 中的问题
x
\textbf x
x 进行训练外,我们还训练模型
π
θ
π_θ
πθ,使其从格式微调后的 LLM 生成的部分轨迹开始推理。由于推理错误通常源于小错误而不是根本缺陷,因此从头开始重新探索效率低下。相反,我们允许模型从中间步骤重新启动以纠正错误并最终获得正确答案。受 Go-Explore 的启发,我们引入了重启和探索 (RAE) 策略。
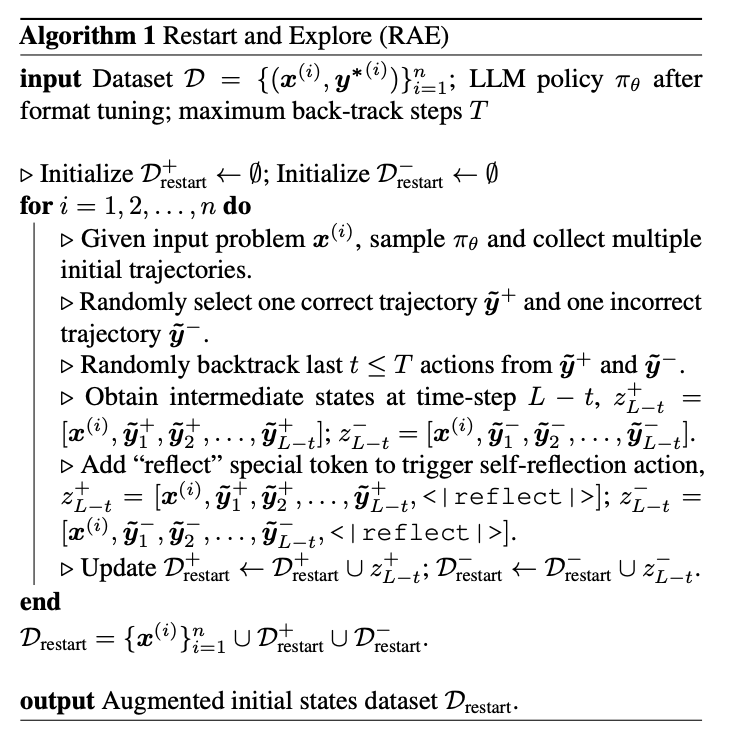
Initial States。RAE 训练模型不仅从问题陈述进行推理,而且从过去轨迹(正确和不正确)中采样的中间步骤进行推理。这使得更深入的探索无需多余的重新计算。如算法 1 所述,给定输入问题
x
∈
D
\textbf x ∈ \mathcal D
x∈D,格式微调后的 LLM 首先生成多个推理轨迹。然后,我们随机回溯
T
≥
0
T ≥ 0
T≥0 个步骤并附加一个反思token
<
∣
r
e
f
l
e
c
t
∣
>
<|reflect|>
<∣reflect∣> 以提示模型改进其推理。为了鼓励多样化的探索,正确和不正确的轨迹分别存储在重启缓冲区(
D
r
e
s
t
a
r
t
+
\mathcal D^+_{restart}
Drestart+ 和
D
r
e
s
t
a
r
t
−
\mathcal D^-_{restart}
Drestart−)中。然后,RL 训练优化这些缓冲区以及原始问题数据集的推理,从合并的数据集
D
r
e
s
t
a
r
t
\mathcal D_{restart}
Drestart 中采样初始状态。
Reward Design。RAE 为模型提供了多次改进推理的机会,但有效的反思是利用这些机会的关键。除了使用正确性作为奖赏外,我们还引入了以下奖赏作为提示,以引导模型得出正确答案:
- Rule-based Reward:基于规则的奖赏只是评估最终答案的正确性。
r r u l e ( y ~ L , y ∗ ) = I y ~ L = y ∗ − 1 ∈ { − 1 , 0 } r_{rule}(\tilde{\textbf y}_L,\textbf y^*)=\mathbb I_{\tilde{\textbf y}_L=\textbf y^*}-1\in \{-1,0\} rrule(y~L,y∗)=Iy~L=y∗−1∈{−1,0} - Reflection Bonuses:为了强化自我反思,我们引入了反思奖赏
r
b
o
n
u
s
r_{bonus}
rbonus。如果模型从存储在负重启缓冲区(
D
r
e
s
t
a
r
t
−
\mathcal D^-_{restart}
Drestart−)中的错误推理轨迹开始并成功解决问题,它将获得奖赏,鼓励它纠正过去的错误。相反,如果它从正重启缓冲区(
D
r
e
s
t
a
r
t
+
\mathcal D^+_{restart}
Drestart+)中的正确轨迹开始但未能解决问题,它将受到惩罚,阻止它在已经走上正确轨道时进行不必要的修改。反思奖赏的正式定义为:
r b o n u s ( z , y ~ ) = { β i f z ∈ D r e s t a r t − a n d y ~ L = y ∗ , − β i f z ∈ D r e s t a r t + a n d y ~ L ≠ y ∗ , 0 , o t h e r w i s e , r_{bonus}(z,\tilde{\textbf y})=\begin{cases} \beta & if~z\in\mathcal D^-_{restart}~and~\tilde{\textbf y}_L=\textbf y^*,\\ -\beta & if~z\in\mathcal D^+_{restart}~and~\tilde{\textbf y}_L\ne\textbf y^*,\\ 0, & otherwise, \end{cases} rbonus(z,y~)=⎩ ⎨ ⎧β−β0,if z∈Drestart− and y~L=y∗,if z∈Drestart+ and y~L=y∗,otherwise,
其中 β β β 是奖赏超参数。 - Preference Bonuses:由于在初始训练阶段正确答案很少,因此奖赏信号通常过于稀疏,无法进行有效的 RL 训练。即使经过反思,模型也可能无法生成任何正确的推理轨迹,从而导致稀赏奖励问题。为了缓解这种情况,我们使用 Bradley-Terry (BT) 偏好框架训练结果奖赏模型 (ORM)。ORM 对推理轨迹进行评级,为正确(首选)的轨迹分配更高的值。对于每个问题 x ∈ D \textbf x ∈ \mathcal D x∈D,我们使用 π θ π_θ πθ 生成多个轨迹,并通过配对正确和不正确的输出来构建偏好数据集。训练 BT 模型以最大化这些对之间的分数差距。ORM 的输出 σ ( r ψ ( z , y ~ ) ) ∈ [ 0 , 1 ] σ(r_ψ(z, \tilde{\textbf y}))∈[0, 1] σ(rψ(z,y~))∈[0,1]用作细粒度奖赏信号,帮助模型进一步完善其推理。有关详细信息,请参阅附录 D.3。
对于初始状态
z
∈
D
r
e
s
t
a
r
t
z ∈ \mathcal D_{restart}
z∈Drestart 和采样轨迹
y
~
\tilde{\textbf y}
y~,整体奖赏函数
r
(
z
,
y
~
)
r(z, \tilde{\textbf y})
r(z,y~) 定义为:
r
(
z
,
y
~
)
=
r
r
u
l
e
(
y
~
L
,
y
∗
)
+
σ
(
r
ψ
(
z
,
y
~
)
)
+
r
b
o
n
u
s
(
z
,
y
~
)
r(z, \tilde{\textbf y})=r_{rule}(\tilde{\textbf y}_L,\textbf y^*)+σ(r_ψ(z, \tilde{\textbf y}))+r_{bonus}(z,\tilde{\textbf y})
r(z,y~)=rrule(y~L,y∗)+σ(rψ(z,y~))+rbonus(z,y~)
Iterative Self-improvement。强化学习使策略能够从自我生成的轨迹中进行自我改进,但这也可能导致恶性循环,即策略收敛到局部次优,无法进一步改进。受 (Agarwal et al., 2022; Schmitt et al., 2018) 的启发,我们提出了一种迭代自我改进策略来缓解此问题。具体来说,在每一轮强化学习训练之后,我们通过有监督微调 (SFT) 将当前优化良好的策略的知识蒸馏到基础模型中。然后,从新微调的模型开始,我们再进行一轮强化学习训练。直观地讲,从优化的角度来看,每一轮蒸馏都可以看作是一种参数重置机制,可帮助策略在损失景观中摆脱局部最优,从而继续自我改进(更多细节包含在 D.3 节中)。在下一节中,我们将提供实证证据来验证这种方法。
5. Experiment

















 248
248

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









