






点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达

我们都知道2020年12月17日凌晨,嫦娥五号返回器携带1731克月壤样品返回地球。网上关于火箭、卫星、挖土等方面的介绍比较多,那我是做激光雷达数据处理的,所以今天主要跟大家聊一聊嫦娥系列搭载的激光载荷。
2020年12月1日23时11分,嫦娥五号探测器稳稳地软着陆在月球正面风暴洋吕姆克山脉以北地区,整个过程一气呵成,完美得超出科研人员的想象。落月过程中,嫦娥五号搭载的激光“双雄”——激光测距测速敏感器、激光三维成像敏感器发挥了重要作用。利用这两种激光载荷具备的测距、测速和三维成像功能,在月球表面选择了一块较为平坦的区域,实现了嫦娥五号的软着陆。
从嫦娥一号到嫦娥五号,激光载荷实现了功能的不断增强,从最初的嫦娥一/二号搭载的激光载荷只具备测距功能,到嫦娥三/四号搭载的激光载荷能够实现三维成像,再到嫦娥五号搭载的激光载荷不仅可以测距和三维成像,而且能够测速。下面让我们回顾一下从嫦娥一号到嫦娥五号,激光载荷的发展历程。
1 嫦娥一/二号搭载的激光高度计
说起月球激光高度计的使用,美国早在1971年发射的“阿波罗15号”就开展了月球表面高程的测量。此后的几十年里,美国也将激光高度计用到了火星、水星和地球的三维地形探测当中。
2005年日本也利用激光测距系统对某个小行星的三维形貌进行了探测。
2004年,中国正式开展月球探测工程,并命名为“嫦娥工程”。嫦娥工程分为“无人月球探测”“载人登月”和“建立月球基地”三个阶段。实行“绕”、“落”、“回”三步走战略,并计划在月球建立研究基地。
2007年我国发射嫦娥一号,通过绕月飞行的方式对月探测,搭载了1台激光高度计(见图1),这个载荷由中科院上海技术物理研究所研制。利用嫦娥一号上搭载的激光高度计和CCD立体相机的数据,我国首次获得了月球表面高精度的数字高程模型(DEM)图(见图2),为后续嫦娥系列着陆器的登月选址提供了基本数据。这枚载荷工作至2009年,进行了超过900万次测量,2009年3月1日16时13分,嫦娥一号卫星在控制下成功撞击月球。

图1 嫦娥一号卫星搭载的激光高度计
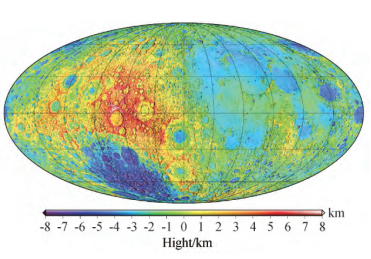
图2 嫦娥一号激光高度计探测的全月面DEM图
嫦娥一号所搭载的激光高度计工作于 Nd:YAG(掺钕钇铝石榴石晶体)激光器的基频光,波长1064nm,激光单脉冲能量为150mJ,激光经扩束后,月面光斑直径为600m。嫦娥一号上搭载的激光高度计的重复频率为1Hz,月面回波由直径为134mm 的望远镜接收,经窄带滤光片后汇聚到硅基雪崩光电二极管上(图1 为嫦娥一号卫星激光高度计的实物图)。嫦娥一/二号上搭载的激光高度计均具备以5m 精度(3σ置信度)探测月球表面高程的能力。
2010年我国发射嫦娥二号,激光高度计的参数与嫦娥一号相当,激光重频由1Hz调整到了5Hz,携带的CCD相机分辨率提高很多,嫦娥一号是120米分辨率,而嫦娥二号在100公里圆轨道运行时分辨率优于10米,进入100公里×15公里的椭圆轨道时,其分辨率能达到1米,已超过了原先预定的1.5米的指标。
通过嫦娥一/二号的激光高度计测量,我国获得了月球表面高精度的数字高程模型图(DEM),为嫦娥三号的月面软着陆提供了重要参考。
2 嫦娥三/四号搭载的激光三维成像系统
2013年,嫦娥三号发射,为实现嫦娥三号着陆器的软着陆,嫦娥三号上安装了激光三维成像敏感器。当着陆器悬停在月面100m高度时,该载荷可对下方三维地形进行精确探测,指导着陆器规避障碍并准确着陆在平坦区域。该载荷同样由中科院上海技术物理研究所研制,采用16波束并行扫描的方式,实现4帧/s的三维地形扫描,激光器单波束的能量为5μJ,激光重复频率为50kHz,接收系统直径为33mm,载荷的3σ测距精度优于0.15m,平面分辨率为0.2m,扫描视场达到33°×29°,该载荷成功保障了嫦娥三号月面软着陆任务的顺利实施。
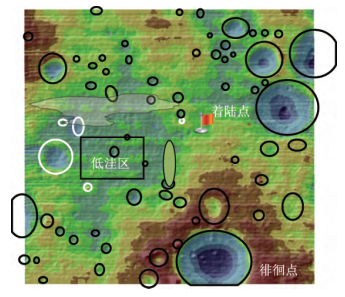
图3 嫦娥三号月面软着陆过程悬停阶段
激光三维成像敏感器测量结果及着陆点
图3为嫦娥三号软着陆最后阶段探测到的着陆点下方三维地形图。由图可以看出,最终着陆点选择在图中所示的相对平坦区。稳稳当当地在月球表面实现“软”着陆是一个难题。 “嫦娥一号”是撞月“硬”着陆。“嫦娥三号”是“软”着陆,不能使用降落伞,因此需要在接近月球表面时首先利用反作用力缓冲,然后让“嫦娥三号”自由落体实现降落。此次嫦娥三号把我国首辆月球车——“玉兔号”也带上了月球,玉兔号在月球恶劣的条件下开展工作。
嫦娥四号于2018年发射,是嫦娥三号的备份星,选择在月球背面降落,并把玉兔二号带上了月球。
3 嫦娥五号搭载的激光“双雄”
2020年发射的嫦娥五号搭载了激光测距测速敏感器和激光三维成像敏感器。嫦娥五号的落月分为三个阶段:当距离月面15千米时,激光测距测速敏感器的测距功能启动,通过大能量、窄脉宽激光来测量着陆器和月面间的距离;当着陆器距离月面约2.5千米时,激光测距测速敏感器的测速功能开始工作,通过探测激光回波的频率信息来测量着陆器相对月面的速度;当着陆器下降到距离月面100米,进入悬停状态时,激光三维成像敏感器开机工作,识别障碍物并为确定何处落月提供依据。
和嫦娥三/四号同类产品相比,嫦娥五号首次在着陆器上增加了激光测速功能。激光测速精度可达0.1米/秒,将三个方向的多普勒激光测速的结果反馈给导航系统,可确保航天器着陆更平稳。通过增加激光测速这一新载荷,多普勒激光测速技术也首次在太空导航上得到应用,空间激光应用系统实现从能量探测模式向频率探测模式的开拓。
4 嫦娥五号搭载的微波雷达
当嫦娥五号完成挖土任务,需要利用上升器来运送月壤样本。在嫦娥五号上升器和轨道器的交会对接阶段,使用的载荷却不是激光雷达,而是微波雷达。通常我们认为激光雷达的精度更高,对于交会对接这样太空中穿针引线的工作,为什么不用激光雷达呢?这是因为交会对接需要雷达在100公里以外就开机工作,一直到完成交会对接任务,距离跨度相当大,因此微波雷达更加适合。
中国航天科工集团二院25所研制的嫦娥五号交会对接微波雷达,作为中远距离测量的唯一手段,为此次交会对接“牵线搭桥”。
该雷达是一组成对产品,由雷达主机和应答机组成,分别安装在嫦娥五号轨道器和上升器上。当两器相距约100公里时,该雷达开始工作,不断为导航控制分系统提供两器之间的相对运动参数,并进行双向通信。两器根据雷达提供信号调整飞行姿态,直至对接机构捕获、锁定。

图4 交会对接
在我国载人航天工程任务中,航天器在近地轨道进行过多次交会对接,都应用了25所微波雷达。不同的是,这次交会对接是在38万公里之外的月球轨道,难度更大。与近地轨道相比,月球轨道没有卫星导航等服务资源,微波通信是中远距离测量的唯一手段。同时月轨环境更复杂,要克服月球引力影响,因此自动交会对接对微波雷达提出的要求极为苛刻。
此次交会对接是体量相差巨大的“大追小”复杂受力过程,采用了抱爪式的弱撞击对接机构,这要求微波雷达的测角精度更高。通过采用误差补偿算法,将微波雷达的测角精度从0.15°提高到了0.1°。精度的提高,大幅提升了精准对接的胜算。
参考文献
[1]舒嵘,孔伟.空间主动光电遥感现状及发展[J].上海航天,2019,36(03):1-14.
[2]嫦娥五号带着月壤从月球起飞回家,这些上海载荷为“挖土”助力http://www.whb.cn/zhuzhan/kjwz/20201204/382813.html
[3]交会对接!样品转移!嫦娥五号是怎样完成这次“深情拥抱”的?https://www.thepaper.cn/newsDetail_forward_10289298
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「计算机视觉工坊」公众号后台回复:深度学习,即可下载深度学习算法、3D深度学习、深度学习框架、目标检测、GAN等相关内容近30本pdf书籍。
下载2
在「计算机视觉工坊」公众号后台回复:计算机视觉,即可下载计算机视觉相关17本pdf书籍,包含计算机视觉算法、Python视觉实战、Opencv3.0学习等。
下载3
在「计算机视觉工坊」公众号后台回复:SLAM,即可下载独家SLAM相关视频课程,包含视觉SLAM、激光SLAM精品课程。
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有ORB-SLAM系列源码学习、3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、深度估计、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的知识点汇总、入门进阶学习路线、最新paper分享、疑问解答四个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~ 















 3497
3497











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









