







这篇论文在2012年发表,文章中的模型AlexNet,参加的竞赛是ImageNet LSVRC-2010,该ImageNet数据集有1.2 million幅高分辨率图像,总共有1000个类别。测试集分为top-1和top-5,并且分别拿到了37.5%和17%的error rates,CNN重新引起人们的关注。下面就AlexNet做一下简要的分析。也是记录一下今天一天的学习。
AlexNet的特点:
1:AlexNet一共有八层,五个卷积层和三个全连接层。由于是对ImageNet数据集进行分类,所以最后一层的输出会接上softmax,一共1000个输出(ImageNet一共有1000个类别),softmax会产生1000类标签。
2:在AlexNet中,使用RuLu函数来增加模型的非线性能力。
3:使用了Dropout训练期间选择性的暂时忽略一些神经元,来减小模型的过拟合。(Dropout可以减小模型的过拟合)
4:局部响应归一化层(LRN):提高精度,LRN现在好像用得不多了,一般使用BN。
5:双GPU并行运行,提高训练速度。
下图就是AlexNet的网络构架,下面就其进行简要分析:

输入图像:在论文输入图像的大小是224224,但是在网上有人应该是227227.其实我认为两个都有其道理,假如说是224224的话,那么在第一层的卷积核中将padding设置为2即可,假如是227227的话,padding设置为0;
我用pytorch中的torchvision.model调用了AlexNet,然后将其网络架构输出,如下:

我发现torchvision.model中AlexNet的参数和论文中的参数是不一致的,所以我们还是就论文中的参数进行分析。
第一层:
卷积层:
torch.nn.Conv2d(3, 96, 11, 4, 0)输入图像是227×227×3,一共有96个11×11×3卷积核,生成96个feature map,步长为4,所以由
n
−
f
+
2
p
s
+
1
\frac{n-f+2p}{s}+1
sn−f+2p+1(其中,n为输入图像的大小,f为卷积核大小,p为padding的大小,s为步长,并且向下取整)得到的Feature Map为55×55×96。又由于使用双GPU进行训练,所以分为两组,大小为55×55×48。
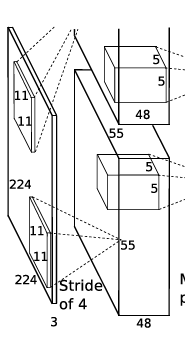
ReLU层:torch.nn.ReLU()然后又将输出的Feature Map经过RuLU层,增加网络中的非线性因素。
池化层+局部响应归一化:torch.nn.MaxPool2d(3,2)然后在经过池化层,使用的是3×3的步长为2的池化单元(这里是重叠池化,步长小于池化单元的大小)由
n
−
f
s
+
1
\frac{n-f}{s}+1
sn−f+1得到输出两组27×27×48的Feature Map。
第二层:
卷积层:
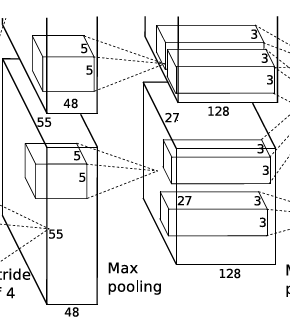
torch.nn.Conv2d(96, 256, 5, 1, 2)输入是两组27*27*48的Feature Map,这一层一共有256个5×5×3卷积核,生成256个feature map,步长为1,padding为2,所以由
n
−
f
+
2
p
s
+
1
\frac{n-f+2p}{s}+1
sn−f+2p+1(其中,n为输入图像的大小,f为卷积核大小,p为padding的大小,s为步长),每组得到的Feature Map为27×27×128。
ReLU层:torch.nn.ReLU()然后又将输出的Feature Map经过RuLU层,增加网络中的非线性因素。
池化层+局部响应归一化:torch.nn.MaxPool2d(3,2)由卷积层二得到的Feature Map,将其经过池化层,使用3×3的步长为2的池化单元,由
n
−
f
s
+
1
\frac{n-f}{s}+1
sn−f+1得到每组的输出为13×13×128。
第三层:
卷积层:
torch.nn.Conv2d(256,384, 3, 1, 1)输入是两组13×13×128的Feature Map,这一层一共有384个3×3×3卷积核,生成384个feature map,步长为1,padding为1,所以由
n
−
f
+
2
p
s
+
1
\frac{n-f+2p}{s}+1
sn−f+2p+1(其中,n为输入图像的大小,f为卷积核大小,p为padding的大小,s为步长),每组得到的Feature Map为13×13×384。

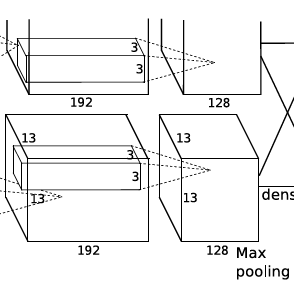
ReLU层:torch.nn.ReLU()然后又将卷积层输出的Feature Map经过RuLU层。输出是13×13×384,分为两组,每组为13×13×192.
第四层:
卷积层:
torch.nn.Conv2d(384,384, 3, 1, 1)输入是两组13×13×192的Feature Map,这一层一共有384个3×3×3卷积核,生成384个feature map,步长为1,padding为1,所以由
n
−
f
+
2
p
s
+
1
\frac{n-f+2p}{s}+1
sn−f+2p+1(其中,n为输入图像的大小,f为卷积核大小,p为padding的大小,s为步长),每组得到的Feature Map为13×13×192。

ReLU层:torch.nn.ReLU()然后又将卷积层输出的Feature Map经过RuLU层。输出是13×13×384,分为两组,每组为13×13×192.
第五层:
卷积层:
torch.nn.Conv2d(384,256, 3, 1, 1)输入是两组13*13*192的Feature Map,这一层一共有256个5×5×3卷积核,生成256个feature map,步长为1,padding为2,所以由
n
−
f
+
2
p
s
+
1
\frac{n-f+2p}{s}+1
sn−f+2p+1(其中,n为输入图像的大小,f为卷积核大小,p为padding的大小,s为步长),每组得到的Feature Map为13×13×128。
ReLU层:torch.nn.ReLU()然后又将输出的Feature Map经过RuLU层,增加网络中的非线性因素。
池化层+局部响应归一化:torch.nn.MaxPool2d(3,2)由卷积层二得到的Feature Map,将其经过池化层,使用3×3的步长为2的池化单元,由
n
−
f
s
+
1
\frac{n-f}{s}+1
sn−f+1得到每组的输出为6×6×128。总的输出为6×6×256
第六层:
全连接层:
这一层是卷积->全连接的连接:torch.nn.Linear(9216, 4096) 输入为6×6×256,该层有4096个卷积核,每个卷积核的大小为6×6×256。由于卷积核的尺寸刚好与待处理特征图(输入)的尺寸相同,即卷积核中的每个系数只与特征图(输入)尺寸的一个像素值相乘,一一对应,因此,该层被称为全连接层。由于卷积核与特征图的尺寸相同,卷积运算后只有一个值,因此,卷积后的像素层尺寸为4096×1×1,即有4096个神经元。

ReLU:这4096个运算结果通过ReLU激活函数生成4096个值
Dropout:torch.nn.Dropout(0.5)随机的断开断开50%神经元的连接,从而防止过拟合现象。
第七层:
全连接层:
这一层是全连接->全连接的连接:torch.nn.Linear(4096, 4096)
ReLU:这4096个运算结果通过ReLU激活函数生成4096个值
Dropout:torch.nn.Dropout(0.5)随机的断开50%神经元的连接,从而防止过拟合现象。
第八层:
输出层:第七层输出的4096个数据与第八层的1000个神经元进行全连接,输出一个元素个数为1000的一维向量。
pytorch实现:
import torch
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 96,11,4,0) # 定义conv1函数的是图像卷积函数:输入为图像(3个频道,即彩色图),输出为6张特征图, 卷积核为5x5正方形
self.pool = nn.MaxPool2d(3, 2)
self.conv2 = nn.Conv2d(96, 256, 5, 1, 2)
self.Conv3 = nn.Conv2d(256, 384, 3, 1, 1)
self.Conv4 = nn.Conv2d(384,384, 3, 1, 1)
self.Conv5 = nn.Conv2d(384,256, 3, 1, 1)
self.drop = nn.Dropout(0.5)
self.fc1 = nn.Linear(9216, 4096)
self.fc2 = nn.Linear(4096, 4096)
self.fc3 = nn.Linear(4096, 100)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = F.relu(self.conv3(x))
x = F.relu(self.conv4(x))
x = self.pool(F.relu(self.conv5(x)))
x = x.view(-1, self.num_flat_features(x))
x = self.drop(F.relu(self.fc1(x)))
x = self.drop(F.relu(self.fc2(x)))
x = self.fc3(x)
return x
def num_flat_features(self, x):
size = x.size()[1:] # all dimensions except the batch dimension
num_features = 1
for s in size:
num_features *= s
return num_features
net = Net()
print(net)

明天继续修改一下细节。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









