







 本文深入探讨SLAM中的Extended Kalman Filter(EKF),它是SLAM早期常用的方法,虽然现代SLAM技术已发展,但理解EKF仍很重要。EKF通过线性化非线性模型,保持在高斯分布假设下的滤波效果,适用于处理机器人定位与地图构建中的非线性问题。
本文深入探讨SLAM中的Extended Kalman Filter(EKF),它是SLAM早期常用的方法,虽然现代SLAM技术已发展,但理解EKF仍很重要。EKF通过线性化非线性模型,保持在高斯分布假设下的滤波效果,适用于处理机器人定位与地图构建中的非线性问题。
这是SLAM最传统的基础,是SLAM最原始的方法,虽然现在使用较少,但是还是有必要了解。
What’s Kalman Filter
这是一个贝叶斯滤波器,估计线性高斯模型,是对线性模型和高斯分布的优化方法。
高斯分布
首先,回顾一下高斯分布:

高斯分布的一些性质:
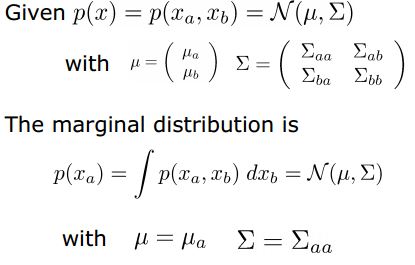
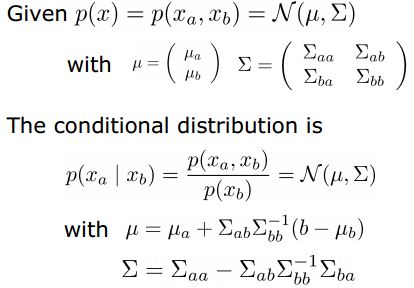
如果原变量为高斯分布,则边缘化和条件概率仍然满足高斯分布。
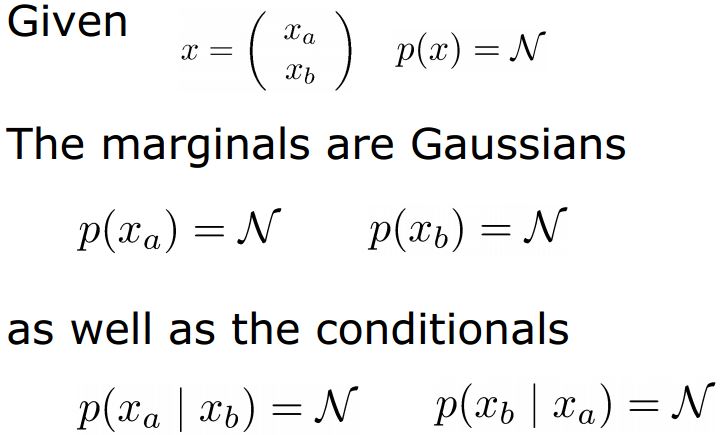
边缘分布和条件分布的模型:
卡尔曼滤波器的主要参数
卡尔曼滤波器假设x(paths), z(observations)都为线性高斯的:
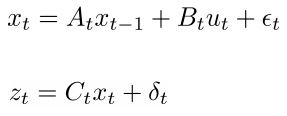
主要参数:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









