







零、前言
最近想学电机,个人性格问题(强迫症)要从原理推导,想了想我本科身为电气自动化的人,居然没学过电磁学。好好搞电机的话还是从基本的电磁学开始学吧。但无论教材还是博客很少有从头到尾一点点推出麦克斯韦方程组的,抑或是有推导但我个人感觉不是很满意的(特别是通过毕奥-萨法尔定律推导安培电流定律那一部分,很多通过立体角方法,又或者直接将无线长直导线换成一个闭合回路来证明。这里我参照了文献[1]并添加了部分自己的理解:)
本文为自学的记录,若有错误之处还请留言以便及时更改。
开始!
一、电场的高斯定律
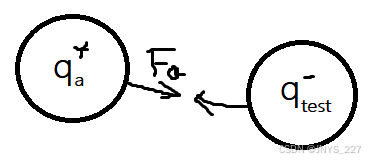
现在,在空间中放置一个 点电荷, 用 q a q_a qa 来表示它的电荷量。这里就叫他小a吧。
首先中学我们学过,电荷量有正有负,同种电荷相互排斥,异种电荷相互吸引。
现在想要验证空间中该点电荷(小a)在不同位置受力大小,这里引入一个测试用的电荷,电荷量为 q t e s t q_{test} qtest。
根据实验能够容易验证:两个电荷之间的力和距离之间呈平方反比关系,和所含电荷量成正比关系。即点电荷(小a)的受力为
F
a
⃗
=
k
q
⋅
q
t
e
s
t
r
2
⋅
a
⃗
(1)
\vec{F_a}=k \frac{q\cdot q_{test}}{r^2} \cdot \vec{a} \tag{1}
Fa=kr2q⋅qtest⋅a(1)
(若两电荷异种,
a
⃗
=
r
⃗
∣
r
∣
\vec{a}=\frac{\vec{r}}{|r|}
a=∣r∣r的方向是从点电荷(小a)指向测试电荷的,同种反之)
当然,我们的目的是验证点电荷的性质,肯定和测试电荷的选取和放置的位置没有关系。因此我们规定了空间中存在一个东西,叫做 场,来描述:即无论选取什么样测试电荷,将测试电荷放到空间某点都能够满足的一个规律。
这里用
E
E
E 来描述空间某处点电荷的场,就叫他电场吧:
E
⃗
=
k
q
r
2
⋅
a
⃗
(2)
\vec{E}=k\frac{q}{r^2}\cdot \vec{a} \tag{2}
E=kr2q⋅a(2)
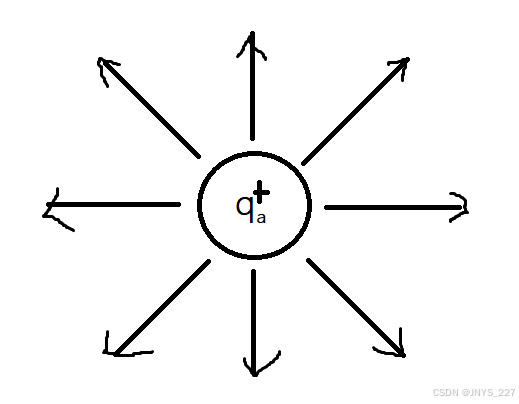
(这里 a ⃗ \vec{a} a的方向规定为:若点电荷是正电荷的话,其方向为该点指向空间某处位置的矢量,反之则是从空间某处指向点电荷)
这样构建出一个电场的模型后,发现电场就是一个点电荷发射(或指向自己)的一大堆矢量箭头,若处于真空中,箭头齐刷刷向四面八方均匀的发射。离得越近,箭头越密集;越远箭头越分散。
聪明的小伙伴很快能够想到,箭头越密集它的电场肯定也就越大啊!Bingo。下面用箭头密度来替代描述一下电场
E ⃗ = q ε 0 S 球 ( r ) a ⃗ = q ε 0 ⋅ 4 π r 2 a ⃗ (3) \vec{E} = \frac{q}{\varepsilon_0 S_{球}(r)} \vec{a} = \frac{q}{\varepsilon_0 \cdot4\pi r^2} \vec{a} \tag{3} E=ε0S球(r)qa=ε0⋅4πr2qa(3)
(其中 ε \varepsilon ε是介质的导电能力,和材料有关。导电性能越强 ε \varepsilon ε越大。真空中由于没有用于导电的物质,因此导电能力最弱,记作 ε 0 \varepsilon_0 ε0。)
这个公式和(2)式对比可以看出,常数 k k k的值满足 k = 1 ε 0 ⋅ 4 π k=\frac{1}{\varepsilon_0 \cdot4\pi} k=ε0⋅4π1。
多个点电荷凑在一起,它们的电场在某点就是各自的矢量场的叠加。
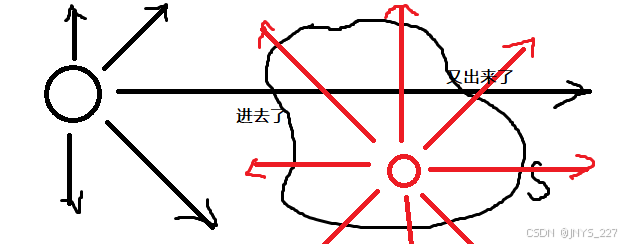
又有仔细观察的小伙伴能够发现,包围一个点电荷的球无论取多大,穿入或穿出的箭头总数目总是固定的。对于真空中的情况下:
E ⋅ 4 π r 2 = q ε 0 (4) E\cdot 4\pi r^2 = \frac{q}{\varepsilon_0 } \tag{4} E⋅4πr2=ε0q(4)
对于包围圈外面的电荷,其生成的电场穿入的箭头总是等于穿出的箭头(因为曲面是封闭的),因此包围圈外面有多少电荷都不会影响上面的公式的计算。
更一般的情况下,对于不是球形曲面,且包围了不止一个点电荷的情况。我们假设闭合曲面包围的总电荷量为 Q = Σ q Q=\Sigma q Q=Σq:
∯
S
E
⃗
d
S
⃗
=
Q
ε
0
(5)
\oiint_S\vec{E}\mathrm{d}\vec{S}=\frac{Q}{\varepsilon_0 } \tag{5}
∬SEdS=ε0Q(5)
OK,高斯定理的积分形式就是(5)式。上式还等价于
∇
⋅
E
⃗
=
ρ
ε
0
(6)
\nabla \cdot\vec{E} = \frac{\rho}{\varepsilon_0 } \tag{6}
∇⋅E=ε0ρ(6)
这里不想看公式可以略过。
其中 ∇ \nabla ∇是Nabla算子,其定义为
∇ : = [ ∂ ∂ x ∂ ∂ y ∂ ∂ z ] \nabla := \begin{bmatrix}\frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z}\end{bmatrix} ∇:=[∂x∂∂y∂∂z∂]
根据高斯定理(指的是曲面积分那个,鬼知道高斯有多少个定理):
∯ S f d S = ∭ V ( ∇ ⋅ f ) d V \oiint_S f\ dS=\iiint_V (\nabla\cdot f)dV ∬Sf dS=∭V(∇⋅f)dV
∭ d i v ( E ⃗ ) d V = ∭ ρ d V ε 0 \iiint div(\vec{E})dV=\frac{\iiint\rho \mathrm{d}V}{\varepsilon_0} ∭div(E)dV=ε0∭ρdV
ρ \rho ρ是空间的电荷密度,两边同时微分,同时根据散度的定义,nabla算子点乘向量可以表示散度。可得公式(6)
二、磁场的高斯定律
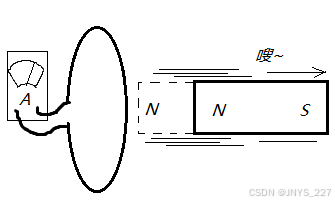
还是从实验入手,现在我们在空间中放一根直直的导线,给他向上通入一个恒定的电流,大小为
i
i
i,然后发现小磁针会按照图中所示的方向偏转。

奥斯特当年也做过的实验:通入 恒定电流 导线的电流会导致测试磁针偏转,保持力和距离之间呈平方反比关系,和通入电流正比关系。
欸,刚才好像在高斯定理见过类似的说明。是不是也可以用场来描述这个现象呢?
于是毕奥-萨伐尔就说了:
电流元 I d l Idl Idl在空间某点 P P P处产生的磁感应强度 d B dB dB的大小与电流元Idl的大小成正比,与电流元 I d l Idl Idl所在处到P点的位置矢量和电流元 I d l Idl Idl之间的夹角的正弦成正比, 而与电流元 I d l Idl Idl到 P P P点的距离的平方成反比。(引自百度百科)
(…啊?)
也就是说,在整根导线上截取一段微元 d l dl dl,通过微元的电流和导线上的电流 I I I一样。因此我们就像点电荷 q q q一样,叫这一小段东西叫做 电流元。
类比点电荷会产生电场,电流元也会产生某种东西,让磁感应的强度发生变化。我们叫这个东西磁感应强度
B
B
B(为啥不是磁场强度?后面再说)。不过电流元的磁场方向需要符合右手螺旋定则。
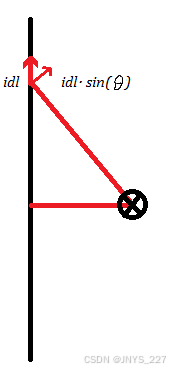
因此这一小节电流元在这个点产生的磁场为:
d
B
=
μ
4
π
r
2
I
d
l
⋅
s
i
n
(
θ
)
=
μ
4
π
r
2
I
d
l
×
e
r
⃗
(7)
\mathrm{d}B=\frac{\mu}{4\pi r^2}I\mathrm{d}l\cdot sin(\theta) = \frac{\mu}{4\pi r^2}I\mathrm{d}l\times \vec{e_r} \tag{7}
dB=4πr2μIdl⋅sin(θ)=4πr2μIdl×er(7)
(
e
r
⃗
\vec{e_r}
er 是从电流微元到该空间点连线的单位长度矢量。将电流元沿连线方向和垂直连线方向进行分解分析。)
因此,对这一条导线 C C C进行积分,即
B ⃗ = ∫ C d B ⃗ = μ I 4 π ∫ C d l ⃗ × e r ⃗ r 2 (8) \vec{B} = \int_C \mathrm{d}\vec{B} = \frac{\mu I}{4\pi }\int_C\frac{\mathrm{d}\vec{l}\times \vec{e_r}}{r^2} \tag{8} B=∫CdB=4πμI∫Cr2dl×er(8)
这就是 毕奥-萨伐尔定律。
那如果我们再照着前面电场高斯定律的形式,取一下散度看看:
∇ ⋅ B ⃗ = μ I 4 π ∫ C ∇ ⋅ ( d l ⃗ × e r ⃗ r 2 ) = μ I 4 π ∫ C ∇ ⋅ ( d l ⃗ × e r ⃗ ) ⋅ r 2 + ∇ ( r 2 ) ( d l ⃗ × e r ⃗ ) r 4 (9) \begin{aligned} \nabla\cdot\vec{B}&=\frac{\mu I}{4\pi }\int_C \nabla\cdot\left(\frac{\mathrm{d}\vec{l}\times \vec{e_r}}{r^2}\right)\\ &=\frac{\mu I}{4\pi }\int_C \frac{\nabla\cdot(\mathrm{d}\vec{l}\times \vec{e_r})\cdot r^2+\nabla (r^2)(\mathrm{d}\vec{l}\times \vec{e_r})}{r^4}\\ \end{aligned} \tag{9} ∇⋅B=4πμI∫C∇⋅(r2dl×er)=4πμI∫Cr4∇⋅(dl×er)⋅r2+∇(r2)(dl×er)(9)
其中, r ⃗ = [ x − a , y − b , z − c ] \vec{r}=[x-a, y-b,z-c] r=[x−a,y−b,z−c]; 因此
∇ ( r 2 ) = ∇ ⋅ ( ( x − a ) 2 + ( y − b ) 2 + ( z − c ) 2 ) 2 = 2 ( x − a ) i + 2 ( y − b ) j + 2 ( z − c ) k = 2 r ⃗ \begin{aligned} \nabla (r^2)&=\nabla\cdot\left( \sqrt{(x-a)^2+ (y-b)^2+(z-c)^2}\right)^2\\ &=2(x-a)i+2(y-b)j+2(z-c)k\\ &=2\vec{r} \end{aligned} ∇(r2)=∇⋅((x−a)2+(y−b)2+(z−c)2)2=2(x−a)i+2(y−b)j+2(z−c)k=2r
所以上半部分的 ∇ ( r 2 ) ( d l ⃗ × e r ⃗ ) = 2 r ⃗ ( d l ⃗ × e r ⃗ ) \nabla (r^2)(\mathrm{d}\vec{l}\times \vec{e_r})=2\vec{r}(\mathrm{d}\vec{l}\times \vec{e_r}) ∇(r2)(dl×er)=2r(dl×er),注意到 r ⃗ \vec{r} r与 ( d l ⃗ × e r ⃗ ) (\mathrm{d}\vec{l}\times \vec{e_r}) (dl×er)向量相互垂直,因此为0。
又
∇ × e r ⃗ = ∣ i j k ∂ ∂ x ∂ ∂ y ∂ ∂ z e x e y e z ∣ = 0 \nabla\times\vec{e_r}=\left|\begin{matrix}i&j&k\\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ e_x& e_y &e_z \end{matrix}\right|=0 ∇×er= i∂x∂exj∂y∂eyk∂z∂ez =0
且由于 d l ⃗ d\vec{l} dl是常量,显然 ∇ × l ⃗ = 0 \nabla\times\vec{l}=0 ∇×l=0
对于前半部分,利用矢量分析的公式 ∇ ⋅ ( F × G ) = ( ∇ × F ) ⋅ G − F ⋅ ( ∇ × G ) \nabla\cdot(\mathbf{F}\times \mathbf{G}) = (\nabla\times\mathbf{F})\cdot\mathbf{G} - \mathbf{F}\cdot(\nabla\times G) ∇⋅(F×G)=(∇×F)⋅G−F⋅(∇×G)可以得到
∇ ⋅ ( d l ⃗ × e r ⃗ ) = ( ∇ × d l ⃗ ) ⋅ e r ⃗ − d l ⃗ ⋅ ( ∇ × e r ⃗ ) = 0 \nabla\cdot(\mathrm{d}\vec{l}\times \vec{e_r})= (\nabla\times\mathrm{d}\vec{l})\cdot \vec{e_r} -\mathrm{d}\vec{l}\cdot(\nabla\times \vec{e_r})=0 ∇⋅(dl×er)=(∇×dl)⋅er−dl⋅(∇×er)=0
因此,公式(9)右半部分全为0。可以得到:
∇
⋅
B
⃗
=
0
(10)
\nabla\cdot\vec{B}=0\tag{10}
∇⋅B=0(10)
高斯磁定律就是这个
三、法拉第电磁感应定律
在推导之前,介绍一个新的物理量:磁通量 Φ \Phi Φ,表示的是磁感线穿过某个曲面A的数量,即
Φ = ∬ A B ⃗ d S (11) \Phi=\iint_A \vec{B}\mathrm{d}S\tag{11} Φ=∬ABdS(11)
如果磁感线穿过曲面的密度和方向处处一致,那么上面的公式可以退化为
Φ = B ⋅ A (12) \Phi = B\cdot A\tag{12} Φ=B⋅A(12)
ok,下面从一个实验说起:
很久很久以前,法拉第在闭合线圈中,通过变化磁场的大小,他竟然发现…线圈中有 感应电流!
于是法拉第认为,穿过线圈的磁场的变化(也就是磁通的变化)会让线圈中产生了个“压力”,让导体中产生电流。于是叫它感生电动势(
ε
e
\varepsilon_e
εe)吧
表示如下:
ε e = − d Φ d t (13) \varepsilon_e=-\frac{\mathrm{d}\Phi}{\mathrm{d}t}\tag{13} εe=−dtdΦ(13)
方向为负是根据楞次定律判断的。这里就不多讲了。
其实这个感生电动势,就是线圈内的一圈感生电场 E ⃗ \vec{E} E,因此
ε e = ∮ C E ⃗ d l ⃗ = − d Φ d t = − ∬ A d B d t d S (14) \varepsilon_e = \oint_C\vec{E}d\vec{l}=-\frac{\mathrm{d}\Phi}{\mathrm{d}t}=-\iint_A \frac{\mathrm{d}B}{\mathrm{d}t}\mathrm{d}S\tag{14} εe=∮CEdl=−dtdΦ=−∬AdtdBdS(14)
斯托克斯公式(第一类曲线积分格式): ∮ l A d s = ∬ ( ∇ × A ) d s \oint_lAds = \iint(\nabla\times A)\mathrm{d}s ∮lAds=∬(∇×A)ds
左边利用斯托克斯公式:
∬
A
(
∇
×
E
⃗
)
d
S
=
−
∬
A
d
B
d
t
d
S
(15)
\iint_A(\nabla\times\vec{E})\mathrm{d}S =-\iint_A \frac{\mathrm{d}B}{\mathrm{d}t}\mathrm{d}S \tag{15}
∬A(∇×E)dS=−∬AdtdBdS(15)
微分一下,可以得到
∇ × E ⃗ = − d B d t (16) \nabla\times\vec{E} = -\frac{\mathrm{d}B}{\mathrm{d}t}\tag{16} ∇×E=−dtdB(16)
法拉第电磁感应定律完成!
四、安培-麦克斯韦全电流定律
新的物理量又来了:电流密度 J J J,表示通过微元面积 d S \mathrm{d}S dS的电流量,即
J ⃗ = lim A → 0 I ⃗ ( A ) A (17) \vec{J}=\lim\limits_{A\to0}\frac{\vec{I}(A)}{A}\tag{17} J=A→0limAI(A)(17)
也就是说,通过面 S S S的电流可以表示成
I ⃗ = ∬ A J ⃗ d S (18) \vec{I}=\iint_A \vec{J}\mathrm{d}S\tag{18} I=∬AJdS(18)
这样做就不用考虑电流元在不同维度空间的情况,统统用电流密度表示。即
I d l ⃗ = ∬ A J ⃗ ( d l ) 3 I\mathrm{d}\vec{l} = \iint_A \vec{J} (\mathrm{d}l)^3 Idl=∬AJ(dl)3
回忆一下高斯磁定律的推导过程,用到的 毕奥-萨伐尔定律 公式(8)
B ⃗ = μ I 4 π ∫ C d l ⃗ × e r ⃗ r 2 \vec{B} =\frac{\mu I}{4\pi }\int_C\frac{\mathrm{d}\vec{l}\times \vec{e_r}}{r^2} B=4πμI∫Cr2dl×er
按照之前的分析,也找个封闭的东西包一下看看:
因为之前电荷都是点状的,我们可以用封闭曲面进行包围;而这里是无限长的恒流导线,因此我们用闭合线来包围这些导线,闭合曲线的方向按照逆时针方向选取:
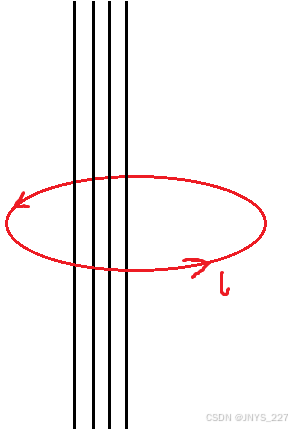
即有向封闭曲线
l
l
l包围的恒流导线为
∮ L B ⃗ d r = μ I 4 π ∮ L ∫ C d l ⃗ × e r ⃗ r 2 d r (19) \oint_{L}\vec{B}\mathrm{d}r=\frac{\mu I}{4\pi } \oint_{L}\int_C \frac{\mathrm{d}\vec{l}\times \vec{e_r}}{r^2}dr \tag{19} ∮LBdr=4πμI∮L∫Cr2dl×erdr(19)
利用斯托克斯公式:
∮ l A d s = ∬ ( ∇ × A ) d s \oint_lAds = \iint(\nabla\times A)\mathrm{d}s ∮lAds=∬(∇×A)ds
带入得到
∮ L B ⃗ d r = μ I 4 π ∬ S ∇ × ( ∫ C d l ⃗ × e r ⃗ r 2 ) d A = μ I 4 π ∬ S ( ∫ C ∇ × ( d l ⃗ × e r ⃗ ) r 2 ) d A (20) \begin{aligned} \oint_{L}\vec{B}\mathrm{d}r &= \frac{\mu I}{4\pi } \iint_S \nabla\times\left(\int_{C} \frac{\mathrm{d}\vec{l}\times \vec{e_r}}{r^2} \right)\mathrm{d} A \\ &= \frac{\mu I}{4\pi } \iint_S \left(\int_{C} \frac{\nabla\times\left(\mathrm{d}\vec{l}\times \vec{e_r}\right)}{r^2} \right)\mathrm{d} A \end{aligned}\tag{20} ∮LBdr=4πμI∬S∇×(∫Cr2dl×er)dA=4πμI∬S ∫Cr2∇×(dl×er) dA(20)
左右微分,然后利用公式:
∇ × ( F × G ) = ( G ⋅ ∇ ) ⋅ F − ( ∇ ⋅ F ) ⋅ G + ( ∇ ⋅ G ) ⋅ F − ( F ⋅ ∇ ) ⋅ G \nabla\times(F\times G) = (G\cdot\nabla)\cdot F - (\nabla\cdot F)\cdot G +(\nabla\cdot G)\cdot F-(F\cdot\nabla)\cdot G ∇×(F×G)=(G⋅∇)⋅F−(∇⋅F)⋅G+(∇⋅G)⋅F−(F⋅∇)⋅G
则 ∇ × ( d l ⃗ × e r ⃗ ) \nabla\times\left(\mathrm{d}\vec{l}\times \vec{e_r}\right) ∇×(dl×er)部分可以化简为
∇ × ( d l ⃗ × e r ⃗ ) = ∇ × ( F × G ) = ( e r ⃗ ⋅ ∇ ) ⋅ d l ⃗ − ( ∇ ⋅ d l ⃗ ) ⋅ e r ⃗ + ( ∇ ⋅ e r ⃗ ) ⋅ d l ⃗ − ( d l ⃗ ⋅ ∇ ) ⋅ e r ⃗ \nabla\times\left(\mathrm{d}\vec{l}\times \vec{e_r}\right) = \\ \nabla\times(F\times G) = (\vec{e_r}\cdot\nabla)\cdot \mathrm{d}\vec{l} - (\nabla\cdot \mathrm{d}\vec{l})\cdot \vec{e_r} +(\nabla\cdot \vec{e_r})\cdot \mathrm{d}\vec{l}-(\mathrm{d}\vec{l}\cdot\nabla)\cdot \vec{e_r} ∇×(dl×er)=∇×(F×G)=(er⋅∇)⋅dl−(∇⋅dl)⋅er+(∇⋅er)⋅dl−(dl⋅∇)⋅er
特别注意:
( ∇ ⋅ F ) G = ( ∂ F x ∂ x + ∂ F y ∂ y + ∂ F z ∂ z ) [ G x , G y , G z ] = ( ∂ F x ∂ x + ∂ F y ∂ y + ∂ F z ∂ z ) G x e x ⃗ + ( ∂ F x ∂ x + ∂ F y ∂ y + ∂ F z ∂ z ) G y e y ⃗ + ( ∂ F x ∂ x + ∂ F y ∂ y + ∂ F z ∂ z ) G z e z ⃗ \begin{aligned}(\nabla\cdot F)G&=\left(\frac{\partial F_x}{\partial x}+\frac{\partial F_y}{\partial y}+\frac{\partial F_z}{\partial z}\right)[G_x,G_y,G_z]\\ &=\left(\frac{\partial F_x}{\partial x}+\frac{\partial F_y}{\partial y}+\frac{\partial F_z}{\partial z}\right)G_x\vec{e_x}+\\ &\qquad\left(\frac{\partial F_x}{\partial x}+\frac{\partial F_y}{\partial y}+\frac{\partial F_z}{\partial z}\right)G_y\vec{e_y}+\\ &\qquad\left(\frac{\partial F_x}{\partial x}+\frac{\partial F_y}{\partial y}+\frac{\partial F_z}{\partial z}\right)G_z\vec{e_z} \end{aligned} (∇⋅F)G=(∂x∂Fx+∂y∂Fy+∂z∂Fz)[Gx,Gy,Gz]=(∂x∂Fx+∂y∂Fy+∂z∂Fz)Gxex+(∂x∂Fx+∂y∂Fy+∂z∂Fz)Gyey+(∂x∂Fx+∂y∂Fy+∂z∂Fz)Gzez
( G ⋅ ∇ ) F = ( ( G x ) ∂ ∂ x + ( G y ) ∂ ∂ y + ( G z ) ∂ ∂ z ) F = ( ( G x ) ∂ F x ∂ x + ( G y ) ∂ F x ∂ y + ( G z ) ∂ F x ∂ z ) e x ⃗ + ( ( G x ) ∂ F y ∂ x + ( G y ) ∂ F y ∂ y + ( G z ) ∂ F y ∂ z ) e y ⃗ + ( ( G x ) ∂ F z ∂ x + ( G y ) ∂ F z ∂ y + ( G z ) ∂ F z ∂ z ) e z ⃗ = ( G x ) ∂ F x ∂ x e x ⃗ + ( G y ) ∂ F y ∂ y e y ⃗ + ( G z ) ∂ F z ∂ z e z ⃗ \begin{aligned}( G \cdot \nabla)F&=\left((G_x)\frac{\partial}{\partial x}+(G_y)\frac{\partial}{\partial y}+(G_z)\frac{\partial}{\partial z}\right)F\\ &= \left((G_x)\frac{\partial F_x}{\partial x}+(G_y)\frac{\partial F_x}{\partial y}+(G_z)\frac{\partial F_x}{\partial z}\right)\vec{e_x}+\\ &\qquad\left((G_x)\frac{\partial F_y}{\partial x}+(G_y)\frac{\partial F_y}{\partial y}+(G_z)\frac{\partial F_y}{\partial z}\right)\vec{e_y}+\\ &\qquad\left((G_x)\frac{\partial F_z}{\partial x}+(G_y)\frac{\partial F_z}{\partial y}+(G_z)\frac{\partial F_z}{\partial z}\right)\vec{e_z}\\ &=(G_x)\frac{\partial F_x}{\partial x}\vec{e_x}+(G_y)\frac{\partial F_y}{\partial y}\vec{e_y}+(G_z)\frac{\partial F_z}{\partial z}\vec{e_z} \end{aligned} (G⋅∇)F=((Gx)∂x∂+(Gy)∂y∂+(Gz)∂z∂)F=((Gx)∂x∂Fx+(Gy)∂y∂Fx+(Gz)∂z∂Fx)ex+((Gx)∂x∂Fy+(Gy)∂y∂Fy+(Gz)∂z∂Fy)ey+((Gx)∂x∂Fz+(Gy)∂y∂Fz+(Gz)∂z∂Fz)ez=(Gx)∂x∂Fxex+(Gy)∂y∂Fyey+(Gz)∂z∂Fzez
其中:
- ∇ ⋅ d l ⃗ = 0 \nabla\cdot \mathrm{d}\vec{l}=0 ∇⋅dl=0,
- ( e r ⃗ ⋅ ∇ ) ⋅ d l ⃗ = ( e r x ∂ ∂ x + e r y ∂ ∂ y + e r z ∂ ∂ z ) d l ⃗ = 0 , (\vec{e_r}\cdot \nabla) \cdot \mathrm{d}\vec{l}=(e_{rx}\frac{\partial }{\partial x}+e_{ry}\frac{\partial }{\partial y}+e_{rz}\frac{\partial }{\partial z})\mathrm{d}\vec{l}=0, (er⋅∇)⋅dl=(erx∂x∂+ery∂y∂+erz∂z∂)dl=0,
- ( d l ⃗ ⋅ ∇ ) e r ⃗ = ( d l r x ) ∂ e r x ∂ x e x ⃗ + ( d l r y ) ∂ e r y ∂ y e y ⃗ + ( d l r z ) ∂ e r z ∂ z e z ⃗ \begin{aligned}( \mathrm{d}\vec{l} \cdot \nabla) \vec{e_r} &=(\mathrm{d}l_{rx})\frac{\partial{e_{rx}}}{\partial x}\vec{e_x}+ ( \mathrm{d}l_{ry})\frac{\partial {e_{ry}}}{\partial y}\vec{e_y}+ ( \mathrm{d}l_{rz})\frac{\partial {e_{rz}}}{\partial z}\vec{e_z}\\ \end{aligned} (dl⋅∇)er=(dlrx)∂x∂erxex+(dlry)∂y∂eryey+(dlrz)∂z∂erzez
由于 d l ⃗ \mathrm{d}\vec{l} dl是方向固定的一个微元,而不是变量。可以看作对 e r ⃗ \vec{e_r} er关于无限长直导线各个坐标"求导"。即
( d l ⃗ ⋅ ∇ ) e r ⃗ = D ∗ ( e r ⃗ ) (\mathrm{d}\vec{l} \cdot \nabla) \vec{e_r} =D^*(\vec{e_r}) (dl⋅∇)er=D∗(er)
注意到分母上还有一个 r 2 r^2 r2项,其在积分时的变化量远大于单位矢量,因此无穷长度的长直导线的积分。即
∫ C ( d l ⃗ ⋅ ∇ ) e r ⃗ r 2 = 0 \int_{C} \frac{(\mathrm{d}\vec{l} \cdot \nabla) \vec{e_r}}{r^2}=0 ∫Cr2(dl⋅∇)er=0
又有,
∇ ⋅ 1 ∣ r ⃗ ∣ = − r ⃗ ∣ r ⃗ ∣ 3 , ∇ 2 ⋅ 1 ∣ r ⃗ ∣ = − 4 π δ ( r ⃗ ) \begin{aligned} \nabla\cdot\frac{1}{|\vec{r}|}&=-\frac{\vec{r}}{|\vec{r}|^3},\\ \nabla^2\cdot\frac{1}{|\vec{r}|}&=-4\pi\delta(\vec{r}) \end{aligned} ∇⋅∣r∣1∇2⋅∣r∣1=−∣r∣3r,=−4πδ(r)
因此,将上述1,2,3结论带入公式(20)可以得到:
∮ L B ⃗ d r = μ I 4 π ∬ S ∫ C ( ∇ ⋅ e r ⃗ ) r 2 ⋅ d l ⃗ d A = μ I 4 π ∬ S ∫ C ( ∇ ⋅ r ⃗ ) ∣ r ⃗ ∣ 3 ⋅ d l ⃗ d A = − μ I 4 π ∫ C ∬ S ∇ ⋅ ( ∇ ⋅ 1 ∣ r ⃗ ∣ ) ⋅ d l ⃗ ⋅ d A = μ I ∫ C ∬ S δ ( r ⃗ ) ⋅ d l ⃗ ⋅ d A \begin{aligned} \oint_{L}\vec{B}\mathrm{d}r&= \frac{\mu I}{4\pi } \iint_S \int_C \frac{(\nabla\cdot \vec{e_r})}{r^2}\cdot \mathrm{d}\vec{l} \ \mathrm{d} A \\ &= \frac{\mu I}{4\pi } \iint_S \int_C \frac{(\nabla\cdot \vec{r})}{|\vec{r}|^3}\cdot \mathrm{d}\vec{l} \ \mathrm{d} A \\ &=-\frac{\mu I}{4\pi } \int_C \iint_S \nabla\cdot(\nabla\cdot\frac{1}{|\vec{r}|})\cdot d\vec{l} \cdot dA\\ &=\mu I \int_C \iint_S \delta(\vec{r})\cdot d\vec{l} \cdot dA \end{aligned} ∮LBdr=4πμI∬S∫Cr2(∇⋅er)⋅dl dA=4πμI∬S∫C∣r∣3(∇⋅r)⋅dl dA=−4πμI∫C∬S∇⋅(∇⋅∣r∣1)⋅dl⋅dA=μI∫C∬Sδ(r)⋅dl⋅dA
因此,只有当画的线包围住导线时,其内部曲面S中才会存在一点使得 r ⃗ = 0 \vec{r}=0 r=0,其余点的积分皆为0。因此当曲线套住电流时,有
∫ C ∬ S δ ( r ⃗ ) ⋅ d l ⃗ ⋅ d A = 1 \int_C \iint_S\delta(\vec{r})\cdot d\vec{l} \cdot dA = 1 ∫C∬Sδ(r)⋅dl⋅dA=1
因此能够得到
∮
L
B
⃗
d
r
=
μ
I
(21)
\oint_{L}\vec{B}\mathrm{d}r=\mu I\tag{21}
∮LBdr=μI(21)
对于(21)式子左边:
∮ L B ⃗ d r = ∬ S ′ ∇ × B ⃗ d A \oint_{L}\vec{B}\mathrm{d}r=\iint_{S^\prime}\nabla\times\vec{B}\ \mathrm{d}A ∮LBdr=∬S′∇×B dA
右边:
μ I = μ ∬ S J d A = ∬ S ′ μ J d A ( S ′ 的其余部分电流密度为 0 ) \mu I = \mu\iint_S J \mathrm{d}A=\iint_{S^\prime}\mu J \mathrm{d}A\qquad(S^\prime 的其余部分电流密度为0) μI=μ∬SJdA=∬S′μJdA(S′的其余部分电流密度为0)
微分后,能够得到微分形式
∇
×
B
⃗
=
μ
J
(22)
\nabla\times\vec{B}=\mu J \tag{22}
∇×B=μJ(22)
但是这一切都建立在 I I I是个常量(即静磁学范围内),它才能在积分内外进进出出,当电流时变时,就不一定正确了。如下实验:
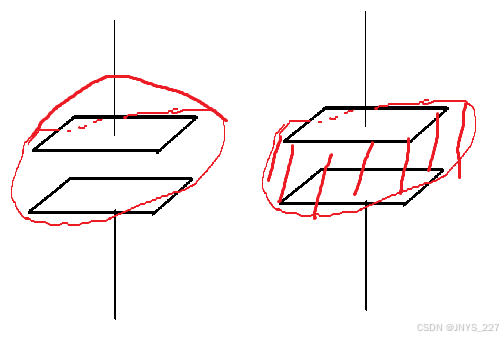
在长直导线中间加一个平板电容器,有电流给它充电。但是若曲面选右图,则通过曲面电流为0!左图通过曲面则不为0。明明说曲面是任意选的,怎么会有两个完全不同的结果了?
因此麦克斯韦在安培定律后面添加了一个修正项,因为电流的变化产生了磁场的变化,其效果与电流传到的效果近似等效,他假设一个物理量位移电流 I w I_w Iw:
I w = ∬ S ( ∂ D ⃗ ∂ t ) d A (23) I_w=\iint_S(\frac{\partial \vec{D}}{\partial t})\mathrm{d}A\tag{23} Iw=∬S(∂t∂D)dA(23)
加上修正项,新的全电流定律为:
∮ L B ⃗ d r = μ I + ∬ S ( ∂ D ⃗ ∂ t ) d A = ∬ S ( μ J ⃗ + ∂ D ⃗ ∂ t ) d A (24) \oint_{L}\vec{B}\mathrm{d}r=\mu I +\iint_S(\frac{\partial \vec{D}}{\partial t})\mathrm{d}A =\iint_S (\mu \vec{J}+\frac{\partial \vec{D}}{\partial t})\mathrm{d}A\tag{24} ∮LBdr=μI+∬S(∂t∂D)dA=∬S(μJ+∂t∂D)dA(24)
同样,取微分形式为
∇ × B ⃗ = μ J ⃗ + ∂ D ⃗ ∂ t (25) \nabla\times\vec{B}=\mu\vec{J}+\frac{\partial \vec{D}}{\partial t}\tag{25} ∇×B=μJ+∂t∂D(25)
Ok,最后公式(6)(10)(16)(25)组成了麦克斯韦方程组。
{
∇
⋅
E
⃗
=
ρ
ε
0
(
电场高斯定律
)
∇
⋅
B
⃗
=
0
(
磁场高斯定律
)
∇
×
E
⃗
=
−
d
B
d
t
(
法拉第电磁感应定律
)
∇
×
B
⃗
=
μ
J
⃗
+
∂
D
⃗
∂
t
(
安倍
−
麦克斯韦全电流定律
)
(26)
\left\{ \begin{aligned} \nabla \cdot\vec{E} &= \frac{\rho}{\varepsilon_0 }\quad&(电场高斯定律)\\ \nabla\cdot\vec{B}&=0\quad&(磁场高斯定律)\\ \nabla\times\vec{E} &= -\frac{\mathrm{d}B}{\mathrm{d}t}\quad&(法拉第电磁感应定律)\\ \nabla\times\vec{B}&=\mu\vec{J}+\frac{\partial \vec{D}}{\partial t}\quad&(安倍-麦克斯韦全电流定律) \end{aligned}\right.\tag{26}
⎩
⎨
⎧∇⋅E∇⋅B∇×E∇×B=ε0ρ=0=−dtdB=μJ+∂t∂D(电场高斯定律)(磁场高斯定律)(法拉第电磁感应定律)(安倍−麦克斯韦全电流定律)(26)
这里特别感谢下面的作者
参考文献:
[1]. 安培环路定理的一种简明证明方法[J].大学物理,1993,12(1):36-37.
[2]. 吴春晓.稳恒磁场安培环路定理的证明[J].萍乡高等专科学校学报,1998,15(4):48-49
网页引用:
[1]. ZhiHu, “史上最透彻讲解:伟大且完美的麦克斯韦方程组”, 数学达人上官正申 ,URL(version: 2024-12-02) https://www.zhihu.com/tardis/zm/art/580205680,
[2]. ZhiHu, “安培环路定理的证明”, 仰望星空 ,URL(version: 2021-12-22)https://zhuanlan.zhihu.com/p/448284033,
[3]. stackexchange, “Proving Ampere’s Circuital Law”, Indrayudh Roy, URL (version: 2014-02-28): https://physics.stackexchange.com/q/101277
[4]. ZhiHu, “Nabla 算符 ∇ 的运算律以及常用公式”, 東雲正樹 ,URL(version: 2022-06-03)https://zhuanlan.zhihu.com/p/52834609,

















 2069
2069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









