






P为空间中某点,在世界坐标系中坐标为(Xw,Yw,Zw),在摄像机坐标系中坐标为(Xc,Yc,Zc),在图像坐标系上的坐标为(x,y,z),像素坐标为(u,v)
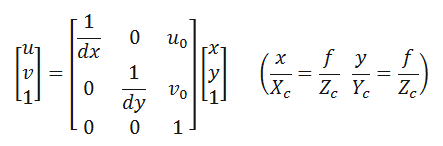
摄像机坐标与图像坐标的转换:

图像坐标与像素坐标的转换:
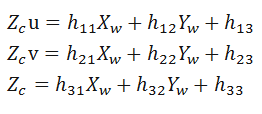
世界坐标与摄像机坐标的转换:

假设世界坐标系中Zw为0(一张标定板上所有标定点都在一个平面上)得到


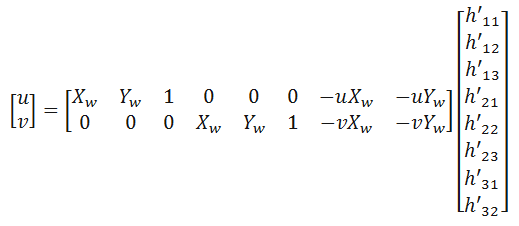
输入至少2n=8个图像坐标和世界坐标系中的点可得到矩阵H,当2n>8时,相当于求解超定方程组
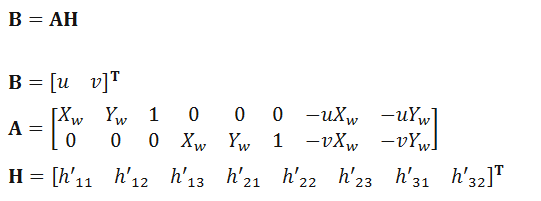
在matlab中可以很方便地求解
P为空间中某点,在世界坐标系中坐标为(Xw,Yw,Zw),在摄像机坐标系中坐标为(Xc,Yc,Zc),在图像坐标系上的坐标为(x,y,z),像素坐标为(u,v)
摄像机坐标与图像坐标的转换:
图像坐标与像素坐标的转换:
世界坐标与摄像机坐标的转换:
假设世界坐标系中Zw为0(一张标定板上所有标定点都在一个平面上)得到
输入至少2n=8个图像坐标和世界坐标系中的点可得到矩阵H,当2n>8时,相当于求解超定方程组
在matlab中可以很方便地求解
 1万+
1466
433
7398
2012
1万+
1466
433
7398
2012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























