






【安装 webots_ros】
首先要下载webots_ros,编译。我用的是webots R2022a。对应的链接如下。
https://github.com/cyberbotics/webots_ros/releases/tag/5.0.1
编译完试运行一下。
roslaunch webots_ros e_puck_line.launch
【菜单】


左边收回,添加节点,视觉选项,保存,快进,目录制视频,声音开关。
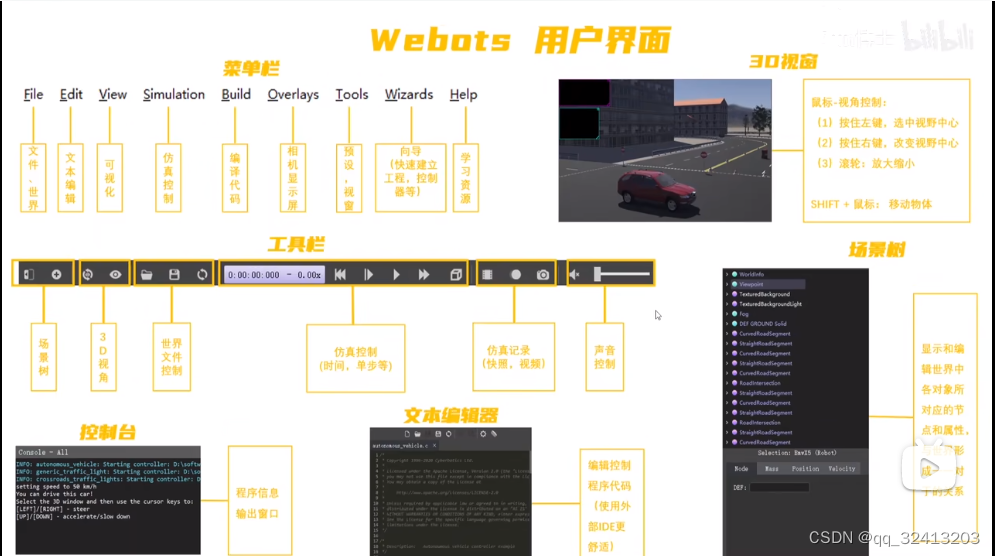
- 调成中文:菜单栏 tools->preferences->general->language 设置成简体中文,然后重启软件就好啦
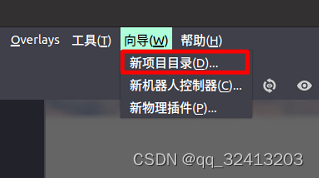
【创建世界】
- 在向导里,创建。
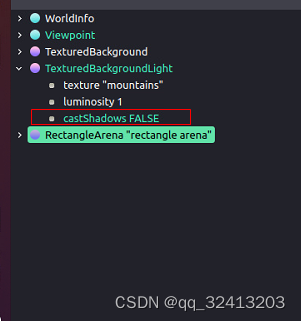
- 关闭阴影在这里
- 你如果要自己导入模型,要注意,一般的模型单位是毫米,但是webots的单位是毫米。
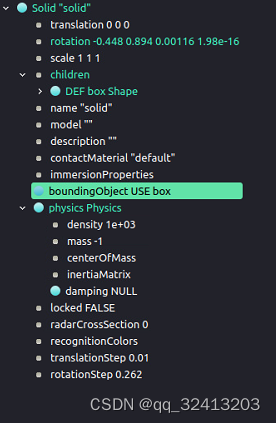
- 添加一个solid一般要关注以下3个重要的属性。
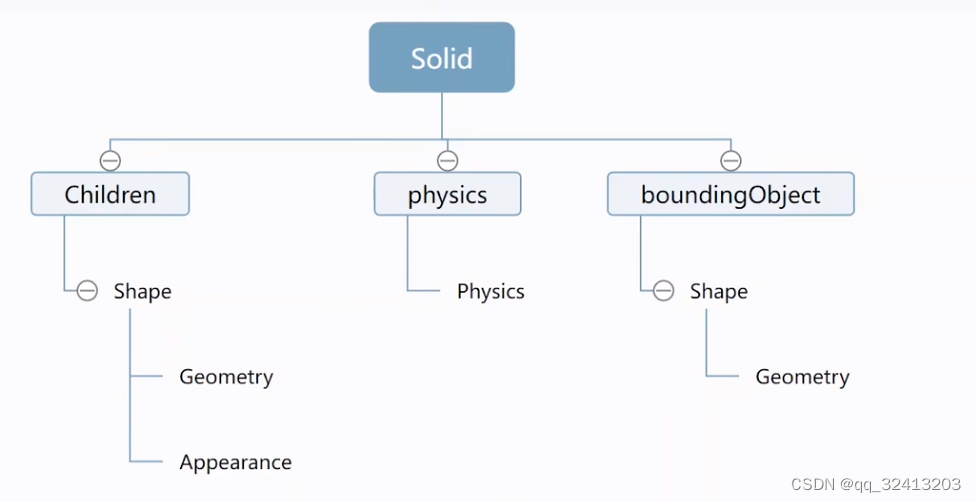
- 首先需要添加一个children。一般是添加shape。点一下shape属性,可以def一个名字,后面给boundingobject使用
- 配置使用boundingobject。选择之前def的名字。
- 配置physics物理属性。一般mass为-1就会使用体积乘密度。
【创建机器人】
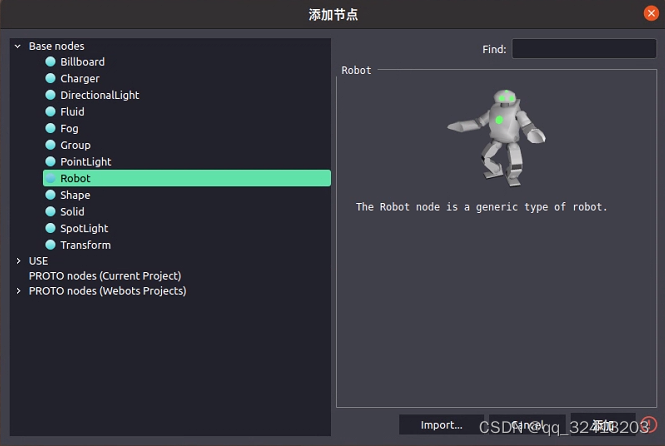
- 首先就是在场景中添加robot节点。
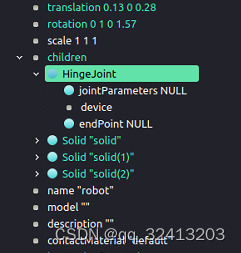
- 在robot的children里添加solid,完善solid的children里的shape,boundingobject和physics。逐步把形状搭建起来。
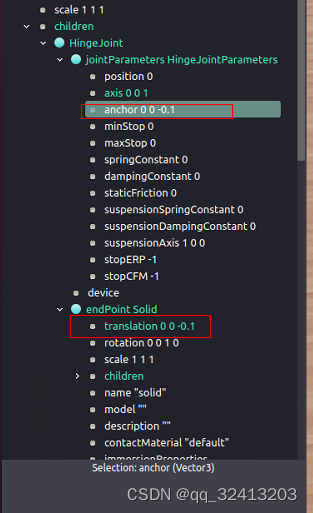
- 添加电机,添加hingejoint节点。
一个轴,一个末端机构,一个驱动
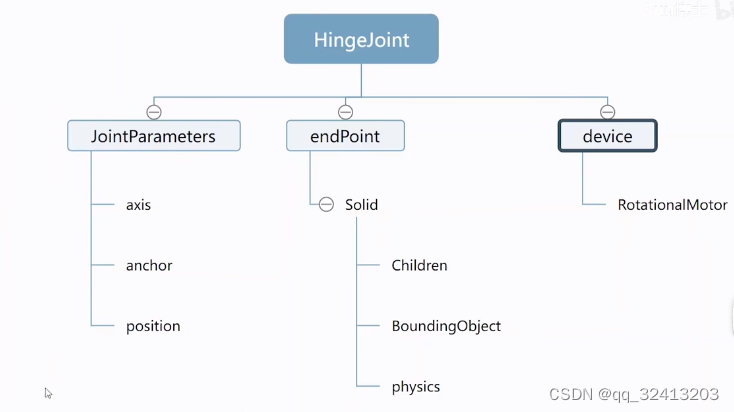
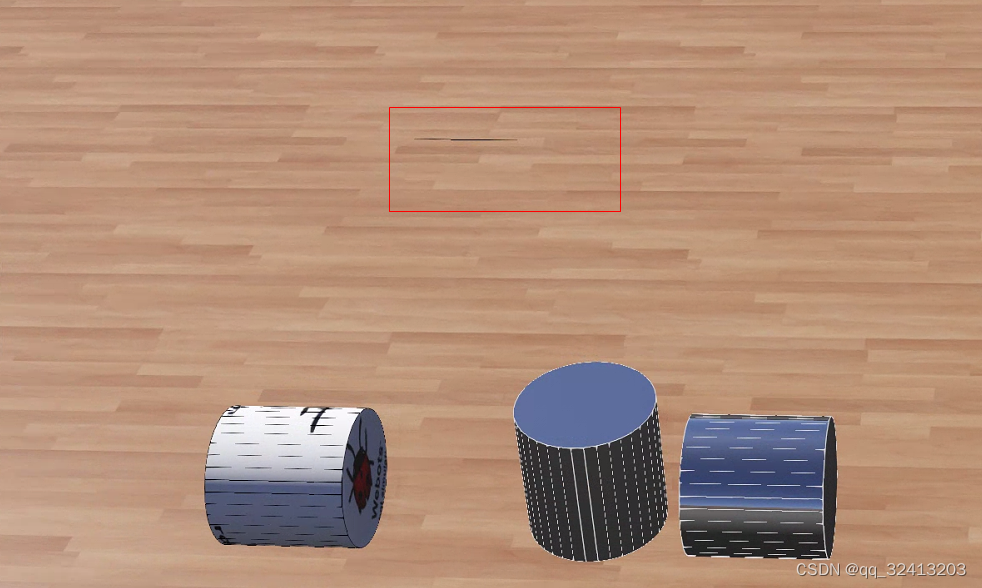
- jointparameters轴的anchor锚点一定要和endpoint的translation保持一致。 anis是调旋转轴向的。anchor就是轴那个位置。可以可视化看那个轴。
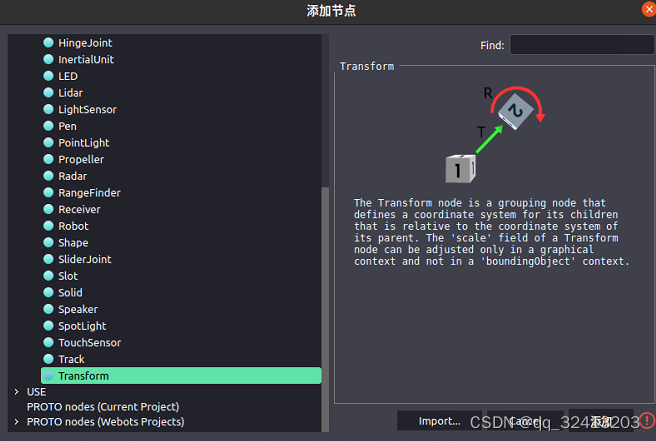
5. 有的时候你需要一个shape对shape的位置的变化,那你可以添加一个transform,然后再把shape放进transform里就好。
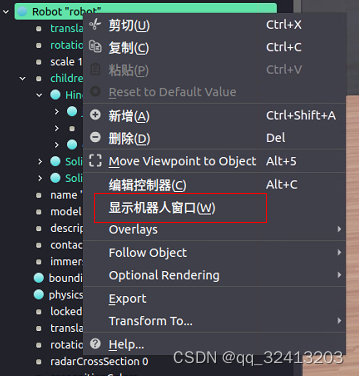
- 当你把传感器安装好以后可以右键机器人打开机器人窗口进行调试。
- 添加机器人控制器。
使用ros控制器就好。















 473
473

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









