







简介
本例子函数参考了【1】中的函数,增加了解析方法的函数与四阶龙格-库塔方法对比,并计算了百分比误差,最大误差在0.3%左右。
参考
【1】Matlab代码分享-龙格库塔(Runge-Kutta)法
code
四阶龙格-库塔函数
参考自【1】链接
function [t,y]=Runge_Kutta4(fun,tb,te,y0,N,varargin)
%四阶龙格-库塔方法求解一阶微分方程数值解
%fun 微分方程
%tb t的取值范围的左端点
%te t的取值范围的左端点
%y0 y的迭代初始值
%N 步长
%如果函数的输入参数没有N时,步长数N取默认值200
if nargin<4
N = 200;
end
h = (te-tb)/N;%步长
t = tb+(0:N)'*h;
y = zeros(size(t));
y(1) = y0;
for k=1:N
K1 = feval(fun,t(k),y(k));
K2 = feval(fun,t(k)+h/2,y(k)+h/2*K1);
K3 = feval(fun,t(k)+h/2,y(k)+h/2*K2);
K4 = feval(fun,t(k)+h,y(k)+h*K3); %已更正,但未验证,欢迎验证指出是否更正正确
y(k+1) = y(k) + h/6*(K1+2*K2+2*K3+K4);
end
end
微分方程函数
function f=RK4_fun(t,y)
f=-y+t.^2+3;
end
一阶微分方程
d
y
d
t
=
−
y
+
t
2
+
3
\frac{dy}{dt} =-y+t^2+3
dtdy=−y+t2+3
解析解
y
=
−
4
e
−
t
+
t
2
−
2
t
+
5
y=-4e^{-t} +t^2-2t+5
y=−4e−t+t2−2t+5
主程序
clc,clear,close all
%四阶龙格-库塔方法求解一阶微分方程数值解
tb=0;
te=3;
y0=1;
[t,soly]=Runge_Kutta4('RK4_fun',tb,te,y0,100);
disp([t,soly])
%解析法结果对比
tb=0;
te=3;
N=100;
h1=(te-tb)/N;
t1=tb+(0:N)'*h1;
ytrue=-4*exp(-t1)+t1.^2-2*t1+5;%解析法算的解
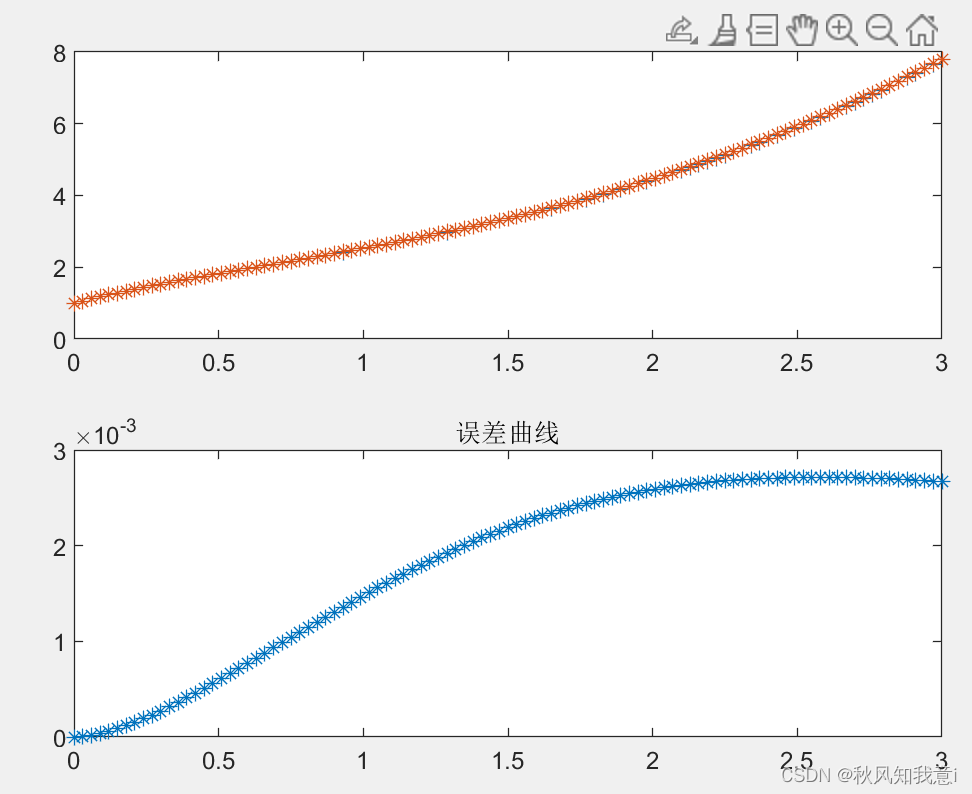
subplot(2,1,1);
plot(t,soly,'+',t1,ytrue,'*');
y_err=abs(soly-ytrue)./ytrue;
subplot(2,1,2);
plot(t,y_err,'*');
title('误差曲线');
结果
分析
从结果图中我们可以看到,绝对值误差在整个区间逐渐增大,最大有0.3%的误差,还是有相当的精度。














 881
881











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









