




 本文介绍了列车在曲线区段行驶时的力学原理,包括如何通过设置外轨超高来平衡离心力,确保行车安全与轨道维护。阐述了曲线半径、列车速度与外轨超高的关系。
本文介绍了列车在曲线区段行驶时的力学原理,包括如何通过设置外轨超高来平衡离心力,确保行车安全与轨道维护。阐述了曲线半径、列车速度与外轨超高的关系。
列车通过曲线区段时做向心运动,会产生离心力,为了平衡离心力的重力分量,通常在曲线区段的外轨设置超高h(mm),它是根据该曲线的半径R(m)及列车的速度v(km/h)的大小来确定的。
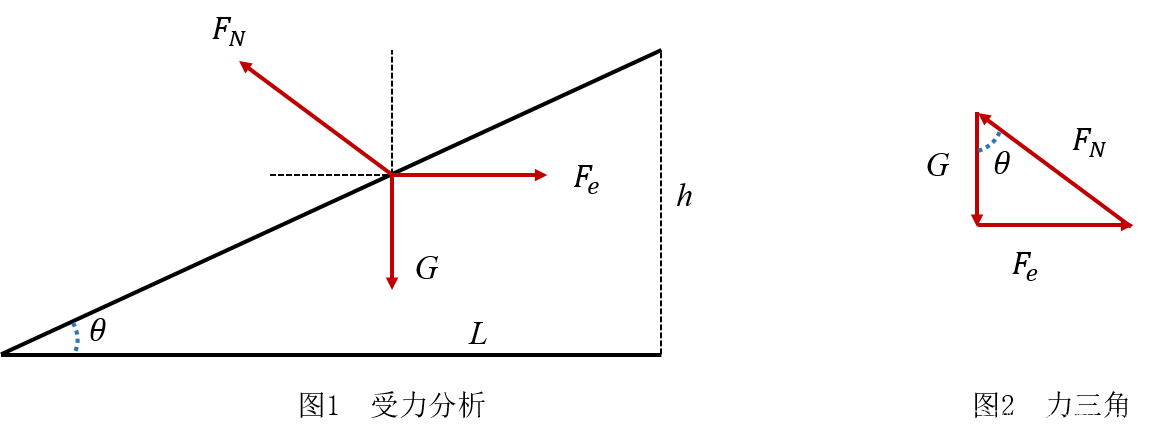
列车在运行到曲线路段时,其受力如图1所示。当轨面支持力F_N、重力G以及离心力F_e达到受力平衡时,构成一个首尾结合的闭合力三角,如图2所示。他们的关系满足
(1)
其中
,
(2)
式中,R表示曲线半径,v表示列车在曲线区段运行的线速度。联立公式(1)和(2)有
(3)
取曲线轨距L=1500mm,则根据公式(3)与力三角平衡状态
可得到
(4)
取,得到曲线半径R(m)、超高值h(mm)与车速v(km/h)的关系
(5)
注意公式(3)和公式(5)的速度,前者m/s,后者是km/h。
因曲线区段的半径R为定值,而列车速度v为变值,于是公式(5)的v应是各列车速度的均方根值。一般超高值取5mm的整数倍,若计算值小于10mm时,可不设超高。合理地设置外轨超高可以减小曲线区段处钢轨的磨损与压溃,延长钢轨的使用年限,同时车辆同一轮对左右两侧垂向力的差别也可以减小。但由于列车实际运行的速度不可能等于设置超高的平均计算速度、必然出现超高不足(欠超高)或超高过剩(过超高)的情况,《铁路工务规则》规定,允许最大未被平衡的超高度为60~75mm,特殊情况下可放宽至90mm。若曲线内轨(或外轨)发现明显的压溃或磨耗,说明超高设置不当,要重新测定列车平均运行速度并调整超高。我国在曲线段所取的最大超高为,在此超高度下若允许未平衡的离心加速度为
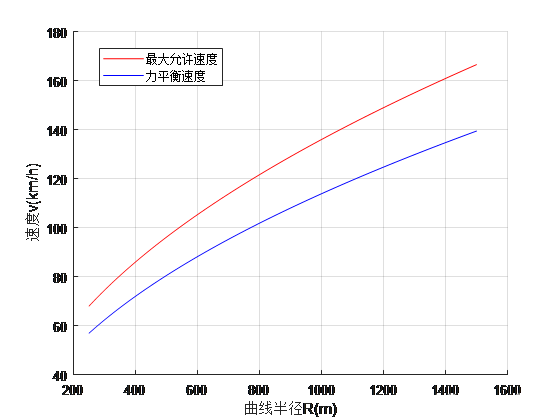
,则在曲线区段允许的最大运行速度为
(6)
在该超高条件下,离心力与向心力平衡时允许的速度为
(7)
现根据公式(6)和(7),可以知道当超高为150mm时候,车速与曲线半径的关系如图3所示。
举一反三:为什么曲线轨距取L=1500mm

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









