







 本文旨在实现类似Unity保存和加载场景的功能,原理是将场景实体和组件用文本信息保存与读取。采用YAML存储和解析,将YAML项目作为子模块融入项目,介绍了关键代码、YAML的BeginSeq作用,还记录了运行库不匹配的bug及解决方法。
本文旨在实现类似Unity保存和加载场景的功能,原理是将场景实体和组件用文本信息保存与读取。采用YAML存储和解析,将YAML项目作为子模块融入项目,介绍了关键代码、YAML的BeginSeq作用,还记录了运行库不匹配的bug及解决方法。
文中若有代码、术语等错误,欢迎指正
前言
-
目的
如此节标题,为了实现像unity那样保存场景到本地和从本地加载场景的功能
-
原理
这功能其实就是将场景的实体和组件用文本信息保存起来,加载场景的话就是读取文本信息,根据文本存储的信息,创建实体并且设置组件和组件数据。
-
用什么存储和解析技术实现
用yaml存储和解析yaml。使用第三方库yaml,将为其写premake文件融入到项目中,使用这个库的存储和解析功能。
-
为什么不用其它格式存储
-
二进制
虽然有保护性,但是阅读困难对引擎开发人员来说
-
Json
Cherno说它的格式{},会漏掉{}括号,维护有点麻烦。
-
将yaml项目作为子模块融入项目中
-
cmd
git submodule add https://github.com/TheCherno/yaml-cpp GameEngineLightWeight/vendor/yaml-cpp -
打开yaml-cpp文件夹下的premake.lua,将staticruntime "off"改为
staticruntime "on"目的是使yaml-cpp项目作为静态链接
-
打开项目根目录的premake5.lua,修改的和增加的地方如下:
IncludeDir["yaml_cpp"] = "GameEngineLightWeight/vendor/yaml-cpp/include" -- 用yaml_cpp下划线是因为"%{IncludeDir.yaml_cpp}"只认识_ 不认识- group "Dependencies" include "GameEngineLightWeight/vendor/GLFW" include "GameEngineLightWeight/vendor/Glad" include "GameEngineLightWeight/vendor/imgui" include "GameEngineLightWeight/vendor/yaml-cpp" group "" includedirs{ "%{prj.name}/src", "%{prj.name}/vendor/spdlog/include", "%{IncludeDir.Glad}", "%{IncludeDir.GLFW}", "%{IncludeDir.ImGui}", "%{IncludeDir.glm}", "%{IncludeDir.stb_image}", "%{IncludeDir.entt}", "%{IncludeDir.yaml_cpp}" } links{ "GLFW", "Glad", "ImGui", "yaml-cpp", "opengl32.lib" } -
重新运行脚本生成新项目
关键的代码
-
存储
void SceneSerializer::Serialize(const std::string& filepath) { YAML::Emitter out; out << YAML::BeginMap; out << YAML::Key << "Scene" << YAML::Value << "Untitled"; out << YAML::Key << "Entities" << YAML::Value << YAML::BeginSeq;// 开始序列化 m_Scene->m_Registry.each([&](auto entityID) { Entity entity = { entityID ,m_Scene.get() }; if (!entity) return; // 序列化实体 SerializeEntity(out, entity); }); out << YAML::EndSeq; // 结束序列化 out << YAML::EndMap; std::ofstream fout(filepath); fout << out.c_str(); } static void SerializeEntity(YAML::Emitter& out, Entity entity) { out << YAML::BeginMap; out << YAML::Key << "Entity" << YAML::Value << "12837192831273"; if (entity.HasComponent<TagComponent>()) { out << YAML::Key << "TagComponent"; out << YAML::BeginMap; auto& tag = entity.GetComponent<TagComponent>().Tag; out << YAML::Key << "Tag" << YAML::Value << tag; out << YAML::EndMap; } // 其它组件类似 out << YAML::EndMap; } -
解析
std::ifstream stream(filepath); std::stringstream strStream; strStream << stream.rdbuf(); // strStream流对象中的流重定向到字符串输出流strStream // 转换为node对象 YAML::Node data = YAML::Load(strStream.str()); if (!data["Scene"]) { return false; } std::string sceneName = data["Scene"].as<std::string>(); HZ_CORE_TRACE("Deserializing scene '{0}'", sceneName); auto entities = data["Entities"]; if (entities) { for (auto entity : entities) { uint64_t uuid = entity["Entity"].as<uint64_t>(); std::string name; auto tagComponent = entity["TagComponent"]; if (tagComponent) { name = tagComponent["Tag"].as<std::string>(); } HZ_CORE_TRACE("Deserialized entity with ID = {0}, name = {1}", uuid, name); Entity deserializedEntity = m_Scene->CreateEntity(name);; auto transformComponent = entity["TransformComponent"]; if (transformComponent) { // 添加实体,默认有transform组件 auto& tc = deserializedEntity.GetComponent<TransformComponent>(); tc.Translation = transformComponent["Translation"].as<glm::vec3>(); tc.Rotation = transformComponent["Rotation"].as<glm::vec3>(); tc.Scale = transformComponent["Scale"].as<glm::vec3>(); } ..... -
存储的文件
Scene: Untitled Entities: - Entity: 12837192831273 TagComponent: Tag: Camera B - Entity: 12837192831273 TagComponent: Tag: Camera A ......
关于yaml的BeginSeq
开了<< YAML::BeginSeq
Scene: Untitled
Entities:
- Entity: 12837192831273
TagComponent:
Tag: Camera B
- Entity: 12837192831273
TagComponent:
Tag: Camera A
- Entity: 12837192831273
TagComponent:
Tag: Green Square Entity
- Entity: 12837192831273
TagComponent:
Tag: Red Square Entity
没开<< YAML::BeginSeq
Scene: Untitled
Entities:
Entity: 12837192831273
TagComponent:
Tag: Camera B
? Entity: 12837192831273
TagComponent:
Tag: Camera A
: Entity: 12837192831273
TagComponent:
Tag: Green Square Entity
? Entity: 12837192831273
TagComponent:
Tag: Red Square Entity
可以看出,BeginSeq是在实体信息前加一个**“-”**,代表着是一个实例
记录bug
-
问题详情
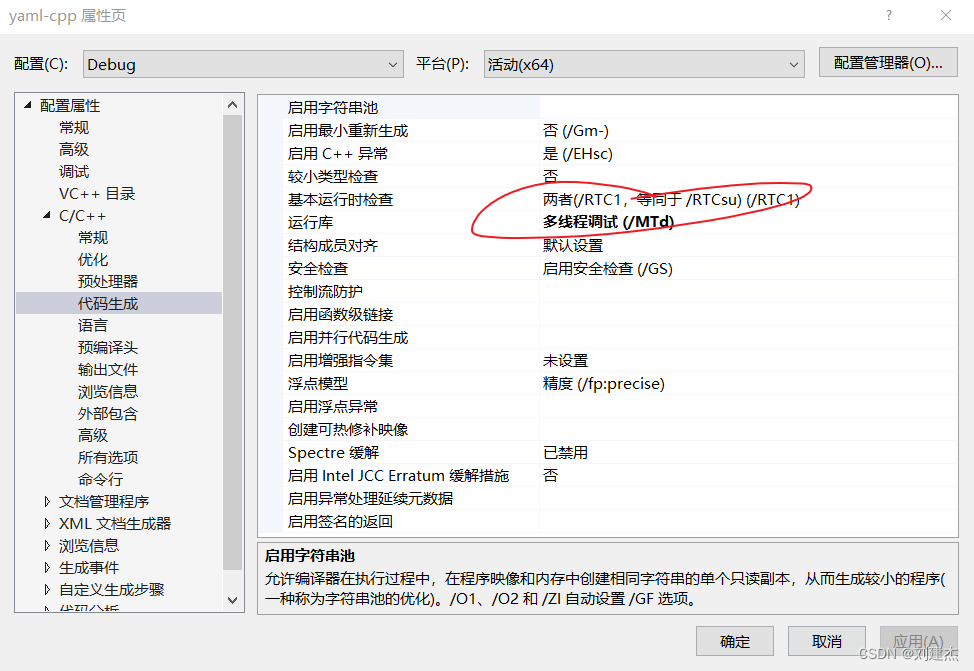
error LNK2038: 检测到“RuntimeLibrary”的不匹配项: 值“MDd_DynamicDebug”不匹配值“MTd_StaticDebug”(EditorLayer.obj 中)
-
解决方法
将yaml-cpp项目的运行库改为MTD;
-
为什么有这个bug
因为在yaml-cpp项目的premake5.lua
filter "system:windows" systemversion "latest" cppdialect "cpp17" staticruntime "off"staticruntime “off”,代表不是静态链接,所以生成了动态链接dll的选项MDd
要修改成
filter "system:windows" systemversion "latest" cppdialect "cpp17" staticruntime "on"才是静态链接


















 859
859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











