







 16、强化学习强化学习(Reinforcement Learning,简称RL)是机器学习的一个重要分支,前段时间人机大战的主角AlphaGo正是以强化学习为核心技术。在强化学习中,包含两种基本的元素:状态与动作,在某个状态下执行某种动作,这便是一种策略,学习器要做的就是通过不断地探索学习,从而获得一个好的策略。例如:在围棋中,一种落棋的局面就是一种状态,若能知道每种局面下的最优落子动作,...
16、强化学习强化学习(Reinforcement Learning,简称RL)是机器学习的一个重要分支,前段时间人机大战的主角AlphaGo正是以强化学习为核心技术。在强化学习中,包含两种基本的元素:状态与动作,在某个状态下执行某种动作,这便是一种策略,学习器要做的就是通过不断地探索学习,从而获得一个好的策略。例如:在围棋中,一种落棋的局面就是一种状态,若能知道每种局面下的最优落子动作,...
16、强化学习
强化学习(Reinforcement Learning,简称RL)是机器学习的一个重要分支,前段时间人机大战的主角AlphaGo正是以强化学习为核心技术。在强化学习中,包含两种基本的元素:状态与动作,在某个状态下执行某种动作,这便是一种策略,学习器要做的就是通过不断地探索学习,从而获得一个好的策略。例如:在围棋中,一种落棋的局面就是一种状态,若能知道每种局面下的最优落子动作,那就攻无不克/百战不殆了~
若将状态看作为属性,动作看作为标记,易知:监督学习和强化学习都是在试图寻找一个映射,从已知属性/状态推断出标记/动作,这样强化学习中的策略相当于监督学习中的分类/回归器。但在实际问题中,强化学习并没有监督学习那样的标记信息,通常都是在尝试动作后才能获得结果,因此强化学习是通过反馈的结果信息不断调整之前的策略,从而算法能够学习到:在什么样的状态下选择什么样的动作可以获得最好的结果。
16.1 基本要素
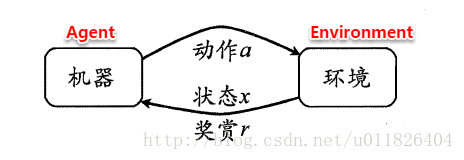
强化学习任务通常使用马尔可夫决策过程(Markov Decision Process,简称MDP)来描述,具体而言:机器处在一个环境中,每个状态为机器对当前环境的感知;机器只能通过动作来影响环境,当机器执行一个动作后,会使得环境按某种概率转移到另一个状态;同时,环境会根据潜在的奖赏函数反馈给机器一个奖赏。综合而言,强化学习主要包含四个要素:状态、动作、转移概率以及奖赏函数。
状态(X):机器对环境的感知,所有可能的状态称为状态空间;
动作(A):机器所采取的动作,所有能采取的动作构成动作空间;
转移概率(P):当执行某个动作后,当前状态会以某种概率转移到另一个状态;
奖赏函数(R):在状态转移的同时,环境给反馈给机器一个奖赏。
因此,强化学习的主要任务就是通过在环境中不断地尝试,根据尝试获得的反馈信息调整策略,最终生成一个较好的策略π,机器根据这个策略便能知道在什么状态下应该执行什么动作。常见的策略表示方法有以下两种:
确定性策略:π(x)=a,即在状态x下执行a动作;
随机性策略:P=π(x,a),即在状态x下执行a动作的概率。
一个策略的优劣取决于长期执行这一策略后的累积奖赏,换句话说:可以使用累积奖赏来评估策略的好坏,最优策略则表示在初始状态下一直执行该策略后,最后的累积奖赏值最高。长期累积奖赏通常使用下述两种计算方法:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 261
261











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









