









简介
最短路径问题是计算机科学中一个经典问题,它涉及找到图中两点之间距离最短的路徑。在实际应用中,最短路径算法用于解决广泛的问题,例如导航、物流和网络优化。
步骤 1:加载道路网络数据
要计算最短路径,我们需要一个表示道路网络的图。我们可以使用 NetworkX 的 read_shp 函数从 Shapefile 文件加载图。
import networkx as nx
g = nx.read_shp("path/to/roads.shp")
步骤 2:定义起点和终点
接下来,我们需要定义起点和终点坐标。我们可以使用 Shapely 的 Point 类来表示这些坐标。
from shapely.geometry import Point
start_point = Point(116.3000, 39.8600)
end_point = Point(116.4500, 39.9000)
步骤 3:寻找最近的节点
由于图中的路径通常链接节点,我们需要找到起点和终点最近的节点。我们可以遍历所有边,并使用 Shapely 的 interpolate 和 project 函数计算距离。
start_nearest_node = None
start_nearest_distance = float('inf')
for edge in g.edges(data=True):
line = wkt_loads(edge[2]['Wkt'])
nearest_point = line.interpolate(line.project(start_point))
distance = nearest_point.distance(start_point)
if distance < start_nearest_distance:
start_nearest_distance = distance
start_nearest_node = list(line.coords)[0]
# 重复上述步骤查找最近的终点节点
步骤 4:计算最短路径
现在,我们可以使用 NetworkX 的 shortest_path 函数计算起点和终点节点之间的最短路径。
shortest_path = nx.astar_path(g, source=start_nearest_node, target=end_nearest_node, weight='length')
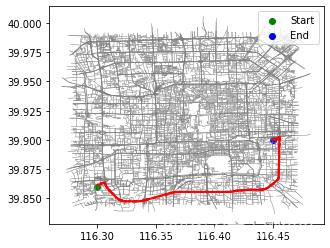
步骤 5:可视化路径
最后,我们可以使用 Matplotlib 绘制最短路径。
import matplotlib.pyplot as plt
fig, ax = plt.subplots()
# 绘制道路边
edges = gpd.read_file("path/to/roads.shp")
edges.plot(ax=ax, color='gray', linewidth=0.5)
# 标记起点和终点
plt.scatter(start_point.x, start_point.y, color='green', label='Start')
plt.scatter(end_point.x, end_point.y, color='blue', label='End')
# 绘制路径
path_geom = []
for u, v in zip(shortest_path[:-1], shortest_path[1:]):
line = wkt_loads(g[u][v]['Wkt'])
path_geom.append(line)
ax.plot(*line.xy, color='red', linewidth=2)
plt.legend()
plt.show()
结论
通过遵循这些步骤,你可以使用 Python 和 NetworkX 生成最短路径。这种技术在各种实际应用中都很有用,例如路线规划、物流优化和网络分析。
代码示例传送门
在哪里
在哪里见过你
你的笑容这样熟悉
我一时想不起
啊 在梦里
















 1081
1081











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









