







本文编辑:调皮哥的小助理
欢迎前来学习毫米波雷达基本原理。本节课将讲的是毫米波雷达利用MATLAB进行信号处理如何解算目标的距离和速度信息。
很多同学在看完雷达原理的基本公式之后,大致上能够明白雷达测距和测速的基本原理,但是到了真正利用MATLAB做信号处理的时候,可能不是很清楚,为什么经过两次FFT(距离维、速度维)这么做就能够得到目标的距离和速度,其背后的实质物理含义是什么?今天带着这个疑问,我把这个问题研究一下,希望能够从最底层的原理给大家解释清楚,并让大家明白到底MATLAB是如何计算出目标得到距离和速度的。
1. 发射信号模型
可以假设,线性调频连续波(LFMCW) 雷达发射波形的信号形式为调频连续锯齿波,线性调频的含义即调制信号频率随时间线性变化。从时域上看,是一个频率随时间线性变化的波形;从频域上看, 发射信号的频率与时间成正比, 如图1-1所示。
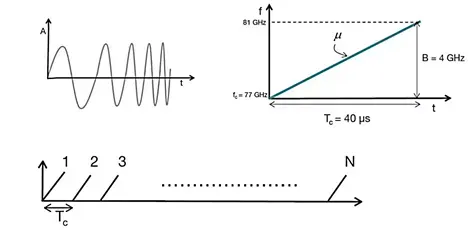
(图1-1 LFMCW锯齿波模型)
由此,可以将LFMCW的发射信号模型用下面公式表示:
s t ( t ) = A cos { 2 π ( f 0 t + u t 2 / 2 ) + ϕ 0 } , t ∈ [ 0 , T ] s_t(t)=A \cos \left\{2 \pi\left(f_0 t+u t^2 / 2\right)+\phi_0\right\}, \quad t \in[0, T] st(t)=Acos{2π(f0t+ut2/2)+ϕ0},t∈[0,T]
其中,发射信号扫频带宽为 B,发射时宽为T,即调频斜率为 B/T,记为u 。所以,单周期 LFMCW 雷达发射信号模型的相位可以写成如下形式:
p t ( t ) = 2 π ( f 0 t + u t 2 / 2 ) + ϕ 0 , t ∈ [ 0 , T ] p_t(t)=2 \pi\left(f_0 t+u t^2 / 2\right)+\phi_0 \quad, t \in[0, T] pt(t)=2π(f0t+ut2/2)+ϕ0,t∈[0,T]
2. 静止情况下测距
假设静止的目标距离雷达的距离为R,电磁波在空气中传输速度为c,则接受天线接受到的信号比发射的信号延迟τ=2R/c,所以理想情况下接受天线接收到的目标回波信号模型如下所示:
S r ( t ) = K A cos { 2 π [ f 0 ( t − τ ) + u ( t − τ ) 2 / 2 ] + ϕ 0 } , t ∈ [ 0 , T ] S_r(t)=K A \cos \left\{2 \pi\left[f_0(t-\tau)+u(t-\tau)^2 / 2\right]+\phi_0\right\}, t \in[0, T] Sr(t)=KAcos{2π[f0(t−τ)+u(t−τ)2/2]+ϕ0},t∈[0,T]
由上述公式可知,回波信号具有和发射信号同样的信号形式,相对于发射信号在时间上有固定延时τ,故而回波信号的相位可以表式为:
p r ( t ) = 2 π [ f 0 ( t − τ ) + u ( t − τ ) 2 / 2 ] + ϕ 0 p_r(t)=2 \pi\left[f_0(t-\tau)+u(t-\tau)^2 / 2\right]+\phi_0 pr(t)=2π[f0(t−τ)+u(t−τ)2/2]+ϕ0
将接收到回波信号Sr(t)和发射信号St(t)进行混频,并经过低通滤波器后就可以得到一个单一频率的正弦波信号,如图中黑色的“IF signal”便是中频信号的频率,如图1-2所示。
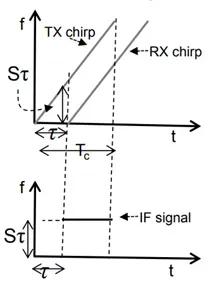
(图1-2 混频)
根据公式推导, 可以得到差频信号的相位表达式为:
p t ( t ) − p r ( t ) = { 2 π [ f 0 t + u t 2 / 2 ] + ϕ 0 } − { 2 π [ f 0 ( t − τ ) + u ( t − τ ) 2 / 2 ] + ϕ 0 } = 2 π f 0 τ + 2 π u τ t − π u τ 2 \begin{aligned} p_t(t)-p_r(t) &=\left\{2 \pi\left[f_0 t+u t^2 / 2\right]+\phi_0\right\}-\left\{2 \pi\left[f_0(t-\tau)+u(t-\tau)^2 / 2\right]+\phi_0\right\} \\ &=2 \pi f_0 \tau+2 \pi u \tau t-\pi u \tau^2 \end{aligned} pt(t)−pr(t)={2π[f0t+ut2/2]+ϕ0}−{2π[f0(t−τ)+u(t−τ)2/2]+ϕ0}=2πf0τ+2πuτt−πuτ2
此时可以很明显地看出,发射信号和单目标的回波信号的频率差为一个单频信号。根据上式,可以得到中频信号频率fm,如下所示:
f m = u τ = u 2 R c = 2 B R c T f_m=u \tau=\frac{u 2 R}{c}=\frac{2 B R}{c T} fm=uτ=cu2R=cT2BR
对中频信号进行 ADC 采样, 然后做 FFT 提取信号的频率信息, 假设 FFT 得到频谱的谱峰值对应的频率为fm , 则目标的距离信息可以表示如下:
R = c T f m 2 B R=\frac{c T f_m}{2 B} R=2BcTfm
3. 运动目标情况下测距
假设,在电磁波的覆盖区域中,某一目标在t0时刻距离发射天线为R0,以径向v远离天线,以远离天线为正方向,至于为什么后续文章会解释)。那么接受到目标的回波信号模型公式依旧与单目标一致,如下所示:
S r ( t ) = K A cos { 2 π [ f 0 ( t − τ ) + u ( t − τ ) 2 / 2 ] + ϕ 0 } , t ∈ [ 0 , T ] S_r(t)=K A \cos \left\{2 \pi\left[f_0(t-\tau)+u(t-\tau)^2 / 2\right]+\phi_0\right\}, t \in[0, T] Sr(t)=KAcos{2π[f0(t−τ)+u(t−τ)2/2]+ϕ0},t∈[0,T]
但是,τ有所改变,如下所示:
τ = 2 R 0 c = 2 ( R + v t ) c \tau=\frac{2 R_0}{c}=\frac{2(R+v t)}{c} τ=c2R0=c2(R+vt)
此时,通过混频后得到中频信号的相位如下所示:
p t ( t ) − p r ( t ) = { 2 π [ f 0 ( t − τ ) + u ( t − τ ) 2 / 2 ] + ϕ 0 } − { 2 π [ f 0 ( t − τ ) + u ( t − τ ) 2 / 2 ] + ϕ 0 } = 2 π f 0 τ + 2 π u τ t + π u τ 2 \begin{aligned} p_t(t)-p_r(t) &=\left\{2 \pi\left[f_0(t-\tau)+u(t-\tau)^2 / 2\right]+\phi_0\right\}-\left\{2 \pi\left[f_0(t-\tau)+u(t-\tau)^2 / 2\right]+\phi_0\right\} \\ &=2 \pi f_0 \tau+2 \pi u \tau t+\pi u \tau^2 \end{aligned} pt(t)−pr(t)={2π[f0(t−τ)+u(t−τ)2/2]+ϕ0}−{2π[f0(t−τ)+u(t−τ)2/2]+ϕ0}=2πf0τ+2πuτt+πuτ2
代入τ后的等式变为:
p t ( t ) − p r ( t ) = { 2 π [ f 0 t + u t 2 / 2 ] + ϕ 0 } − { 2 π [ f 0 ( t − τ ) + u ( t − τ ) 2 / 2 ] + ϕ 0 } = 2 π f 0 τ + 2 π u τ t − π u τ 2 = 4 π f 0 ( R + v t ) c + 4 π u ( R + v t ) t c − 4 π u ( R + v t ) 2 c 2 = 4 π f 0 ( R + v t ) c + 4 π u ( R + v t ) t c − ( 4 π u R 2 c 2 + 4 π u v 2 t 2 c 2 + 8 π u R v t c 2 ) = 4 π R f 0 c + 4 π f 0 v t c + 4 π u R t c + 4 π u v t 2 c − 4 π u R 2 c 2 − 4 π u v 2 t 2 c 2 − 8 π u R v t c 2 = 2 π ( 2 f 0 v c + 2 u R c − 4 u R v c 2 ) t + π ( 4 u v c − 4 u v 2 c 2 ) t 2 + 4 π R f 0 c − 4 π u R 2 c 2 \begin{aligned} p_t(t)-p_r(t) &=\left\{2 \pi\left[f_0 t+u t^2 / 2\right]+\phi_0\right\}-\left\{2 \pi\left[f_0(t-\tau)+u(t-\tau)^2 / 2\right]+\phi_0\right\} \\ &=2 \pi f_0 \tau+2 \pi u \tau t-\pi u \tau^2 \\ &=\frac{4 \pi f_0(R+v t)}{c}+\frac{4 \pi u(R+v t) t}{c}-\frac{4 \pi u(R+v t)^2}{c^2} \\ &=\frac{4 \pi f_0(R+v t)}{c}+\frac{4 \pi u(R+v t) t}{c}-\left(\frac{4 \pi u R^2}{c^2}+\frac{4 \pi u v^2 t^2}{c^2}+\frac{8 \pi u R v t}{c^2}\right) \\ &=\frac{4 \pi R f_0}{c}+\frac{4 \pi f_0 v t}{c}+\frac{4 \pi u R t}{c}+\frac{4 \pi u v t^2}{c}-\frac{4 \pi u R^2}{c^2}-\frac{4 \pi u v^2 t^2}{c^2}-\frac{8 \pi u R v t}{c^2} \\ &=2 \pi\left(\frac{2 f_0 v}{c}+\frac{2 u R}{c}-\frac{4 u R v}{c^2}\right) t+\pi\left(\frac{4 u v}{c}-\frac{4 u v^2}{c^2}\right) t^2+\frac{4 \pi R f_0}{c}-\frac{4 \pi u R^2}{c^2} \end{aligned} pt(t)−pr(t)={2π[f0t+ut2/2]+ϕ0}−{2π[f0(t−τ)+u(t−τ)2/2]+ϕ0}=2πf0τ+2πuτt−πuτ2=c4πf0(R+vt)+c4πu(R+vt)t−c24πu(R+vt)2=c4πf0(R+vt)+c4πu(R+vt)t−(c24πuR2+c24πuv2t2+c28πuRvt)=c4πRf0+c4πf0vt+c4πuRt+c4πuvt2−c24πuR2−c24πuv2t2−c28πuRvt=2π(c2f0v+c2uR−c24uRv)t+π(c4uv−c24uv2)t2+c4πRf0−c24πuR2
很显然,根据上述公式可知,对于运动目标的信号的中频信号依然是一个线性调频信号,所以信号的调频斜率Um,载频fm,初相ϕm分别如下:
u m = 4 u v c − 4 u v 2 c 2 f m = 2 f 0 v c + 2 u R c − 4 u R v c 2 ϕ m = 4 π R f 0 c − 4 π u R 2 c 2 \begin{aligned} u_m &=\frac{4 u v}{c}-\frac{4 u v^2}{c^2} \\ f_m &=\frac{2 f_0 v}{c}+\frac{2 u R}{c}-\frac{4 u R v}{c^2} \\ \phi_m &=\frac{4 \pi R f_0}{c}-\frac{4 \pi u R^2}{c^2} \end{aligned} umfmϕm=c4uv−c24uv2=c2f0v+c2uR−c24uRv=c4πRf0−c24πuR2
因为光速c等于3*10^8m/s,所以忽略c的平方项,则中频信号的时宽带宽积Dm为:
B
m
=
u
m
T
=
4
u
v
c
T
=
4
B
v
c
B_m=u_m T=\frac{4 u v}{c} T=\frac{4 B v}{c}
Bm=umT=c4uvT=c4Bv
D
m
=
B
m
T
=
4
v
c
D
D_m=B_m T=\frac{4 v}{c} D
Dm=BmT=c4vD
其中,Bm中频信号的调频带宽,为D为发射信号时宽带宽积。上述公式可以表明,即使目标在几百米每秒的高速运动情况下,中频信号的时宽带宽积仅有原来的10^-6 倍,在毫米波雷达发射极大时宽带宽积(106)的信号情况下,中频信号Dm的数量级也只有100 。因此,可近似认为回波差拍信号是一单频信号,通过频谱分析(FFT)即能得到其中心频率。所以TI的官方文档中,将中频信号近似地写成:
S ( t ) = A sin ( 2 π f 0 t + ϕ 0 ) S(t)=A \sin \left(2 \pi f_0 t+\phi_0\right) S(t)=Asin(2πf0t+ϕ0)
并说明了这个公式是近似值,其中f0等效fm。TI官方给出的中频信号中心频率和相位的公式如下:
f 0 = S 2 d c , ϕ 0 = 4 π d λ f_0=\frac{S 2 d}{c}, \phi_0=\frac{4 \pi d}{\lambda} f0=cS2d,ϕ0=λ4πd
其中,d为目标距雷达的距离R,S为调频斜率。下面由上述推导的公式来证明,为什么最终会是这个简单的公式呢?将下面的公式去掉光速的平方项,做近似。
B m = 4 u v c − 4 u v 2 c 2 f m = 2 f 0 v c + 2 u R c − 4 u R v c 2 . ϕ m = 4 π R f 0 c − 4 π u R 2 c 2 \begin{aligned} B_m &=\frac{4 u v}{c}-\frac{4 u v^2}{c^2} \\ f_m &=\frac{2 f_0 v}{c}+\frac{2 u R}{c}-\frac{4 u R v}{c^2} . \\ \phi_m &=\frac{4 \pi R f_0}{c}-\frac{4 \pi u R^2}{c^2} \end{aligned} Bmfmϕm=c4uv−c24uv2=c2f0v+c2uR−c24uRv.=c4πRf0−c24πuR2
近似写成:
B m = 4 u v c − 4 u v 2 c 2 ≈ 4 u v c f m = 2 f 0 v c + 2 u R c − 4 u R v c 2 ≈ 2 f 0 v c + 2 u R c = 2 u R c + 2 v λ ϕ m = 4 π R f 0 c − 4 π u R 2 c 2 ≈ 4 π R f 0 c = 4 π R λ \begin{aligned} B_m &=\frac{4 u v}{c}-\frac{4 u v^2}{c^2} \approx \frac{4 u v}{c} \\ f_m &=\frac{2 f_0 v}{c}+\frac{2 u R}{c}-\frac{4 u R v}{c^2} \approx \frac{2 f_0 v}{c}+\frac{2 u R}{c}=\frac{2 u R}{c}+\frac{2 v}{\lambda} \\ \phi_m &=\frac{4 \pi R f_0}{c}-\frac{4 \pi u R^2}{c^2} \approx \frac{4 \pi R f_0}{c}=\frac{4 \pi R}{\lambda} \end{aligned} Bmfmϕm=c4uv−c24uv2≈c4uv=c2f0v+c2uR−c24uRv≈c2f0v+c2uR=c2uR+λ2v=c4πRf0−c24πuR2≈c4πRf0=λ4πR
如果忽略多普勒频率对对中频信号频率的影响,则有:
f m = 2 u R c = S 2 d c = f 0 , ϕ m = 4 π R λ = 4 π d λ = ϕ 0 , R = d f_m=\frac{2 u R}{c}=\frac{S 2 d}{c}=f_0, \phi_m=\frac{4 \pi R}{\lambda}=\frac{4 \pi d}{\lambda}=\phi_0 \quad, R=d fm=c2uR=cS2d=f0,ϕm=λ4πR=λ4πd=ϕ0,R=d
关于上述TI官方给出的中频信号的近似值,就是这么得到的。近似公式忽略 IF 信号的频率与物体速度的依赖关系。在快速 FMCW 雷达中,其影响通常非常小,且在处理完成多普勒 FFT 后,即可轻松对其进行进一步校正,这就是多普勒相位补偿。
4. MATLAB解算距离和速度
假设单个扫描周期 ADC采样点数为 N, 采样频率为Fs, 式中 n 为 FFT 谱峰对应的频点, 根据 T、 Fs、 N 之间的关系,距离与频率关系的公式可进一步化简为:
R = c T f m 2 B = c T 2 B F s N n = c 2 B T F s N n = Δ R ∗ 1 ∗ n = Δ R ∗ n R=\frac{c T f_m}{2 B}=\frac{c T}{2 B} \frac{F_s}{N} n=\frac{c}{2 B} \frac{T F_s}{N} n=\Delta R^* 1 * n=\Delta R^* n R=2BcTfm=2BcTNFsn=2BcNTFsn=ΔR∗1∗n=ΔR∗n
式中,c/2B为雷达的距离分辨率ΔR, 可见中频信号的 FFT 谱峰对应的频点,即目标距离门号,乘以距离分辨率就可得到目标的距离。
上述公式就是在用MATLAB计算目标的距离的时候,我们通常得到的是点的序号(距离门号),而不是直接得到目标的距离,因此需要通过这个公式将距离门号转换成目标真实的距离。
但是请注意,因为上述的采样点刚好是2的次幂,因此,计算之后系数K刚好为1,假如采样点数不是2的次幂,如200个点,然后256个点的FFT,那么K值就不能等于1了,如下公式所示:
R = c T f m 2 B = c T 2 B F s N n = c 2 B T F s N n = Δ R ∗ K ∗ n = K ∗ Δ R ∗ n R=\frac{c T f_m}{2 B}=\frac{c T}{2 B} \frac{F_s}{N} n=\frac{c}{2 B} \frac{T F_s}{N} n=\Delta R * K * n=K * \Delta R * n R=2BcTfm=2BcTNFsn=2BcNTFsn=ΔR∗K∗n=K∗ΔR∗n
在MATLAB中,对于距离维做FFT,目的就是找出中频频率峰值和频点,然后根据峰值所在的距离门号,解算出目标的距离,具体如图2-1所示。
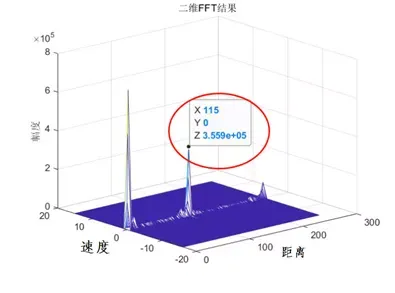
(图2-1 距离解算前)
例如,上述数据的雷达发射信号的真实带宽=调频斜率*(ADC采样点数/采样率)=68*(256/5500)=3165MHz;真实距离分辨率:ΔR = C/2B=0.048m,所以对应点目标的距离为:
R = (n-1)ΔR = 114*0.047=5.47m,MATLAB起始点是从1开始的,所以是n-1。即可得到距离解算的结果,如图2-2所示。
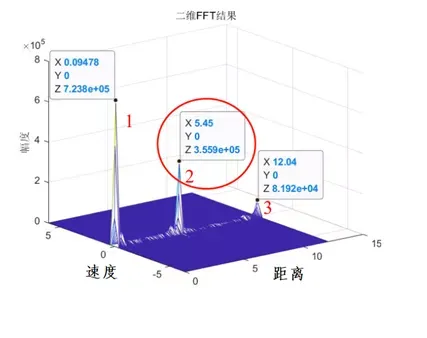
(图2-2 距离解算后)
至此,我们推导并论证了线性调频连续波测距原理的来龙去脉,大概讲清楚了从信号发射、回波信号、混频、低通滤波、中频信号,到距离估计的整个脉络,同时梳理清楚了由TI官方给出的公式近似值的背后隐藏的一些理论,并展现了我们为什么要这么做,背后的含义是什么的解释。最后也为大家推导的公式,为后续做相位补偿提供了理论依据。之前的文章写过线性调频连续波测速的基本原理,是利用多个脉冲之间的相位差,然后做FFT得到的。重现上述推导的公式如下:
B
m
=
4
u
v
c
−
4
u
v
2
c
2
≈
4
u
v
c
B_m=\frac{4 u v}{c}-\frac{4 u v^2}{c^2} \approx \frac{4 u v}{c}
Bm=c4uv−c24uv2≈c4uv
f
m
=
2
f
0
v
c
+
2
u
R
c
−
4
u
R
v
c
2
≈
2
f
0
v
c
+
2
u
R
c
=
2
u
R
c
+
2
v
λ
f_m=\frac{2 f_0 v}{c}+\frac{2 u R}{c}-\frac{4 u R v}{c^2} \approx \frac{2 f_0 v}{c}+\frac{2 u R}{c}=\frac{2 u R}{c}+\frac{2 v}{\lambda}
fm=c2f0v+c2uR−c24uRv≈c2f0v+c2uR=c2uR+λ2v
ϕ
m
=
4
π
R
f
0
c
−
4
π
u
R
2
c
2
≈
4
π
R
f
0
c
=
4
π
R
λ
\phi_m=\frac{4 \pi R f_0}{c}-\frac{4 \pi u R^2}{c^2} \approx \frac{4 \pi R f_0}{c}=\frac{4 \pi R}{\lambda}
ϕm=c4πRf0−c24πuR2≈c4πRf0=λ4πR
f
m
=
2
u
R
c
=
S
2
d
c
=
f
0
,
ϕ
m
=
4
π
R
λ
=
4
π
d
λ
=
ϕ
0
,
R
=
d
f_m=\frac{2 u R}{c}=\frac{S 2 d}{c}=f_0, \phi_m=\frac{4 \pi R}{\lambda}=\frac{4 \pi d}{\lambda}=\phi_0 \quad, R=d
fm=c2uR=cS2d=f0,ϕm=λ4πR=λ4πd=ϕ0,R=d
对于两个相邻周期的信号,由于周期间隔时间Tc较短,距离分辨率有限,两个周期内距离维FFT谱中的峰值位置几乎没有发生变化,但是由于相位比距离更加敏感,即周期间微小的距离变化会引起中频信号的初相的变化。由傅里叶变换特性,信号的初相体现在峰值处的复数值对应的相位,计算相邻周期的相位差,即可得到目标的速度:
ϕ 0 = 4 π d λ Δ ϕ = 4 π v T c λ \begin{aligned} \phi_0 &=\frac{4 \pi d}{\lambda} \\ \Delta \phi &=\frac{4 \pi v T_c}{\lambda} \end{aligned} ϕ0Δϕ=λ4πd=λ4πvTc
其中,两个脉冲相邻的微小距离变化为v*Tc,所以两个脉冲间的速度为:
v = λ Δ ϕ 4 π T c v=\frac{\lambda \Delta \phi}{4 \pi T_c} v=4πTcλΔϕ
推广到多个脉冲,如128个,那么相位的变化是呈周期性的,速度维度做128点FFT后的峰值就是相位差,即获取速度对应的峰值和频点再通过解算便可获得目标的速度,这个过程就是速度维FFT。接下来进行速度解算。上述公式经过推导可以变为:
Δ
v
=
λ
2
N
T
c
\Delta v=\frac{\lambda}{2 N T_c}
Δv=2NTcλ
v
=
λ
Δ
ϕ
4
π
T
c
=
λ
4
π
T
c
2
π
N
n
=
λ
2
N
T
c
n
=
Δ
v
⋅
n
v=\frac{\lambda \Delta \phi}{4 \pi T_c}=\frac{\lambda}{4 \pi T_c} \frac{2 \pi}{N} n=\frac{\lambda}{2 N T_c} n=\Delta v \cdot n
v=4πTcλΔϕ=4πTcλN2πn=2NTcλn=Δv⋅n
其中,相位的最大值为2π。由此,速度的解算依赖于速度分辨率和速度门号,速度门号即为速度维FFT之后拿到的峰值所对应的下标(频点)。例如图3-1所示,为速度解算过程。
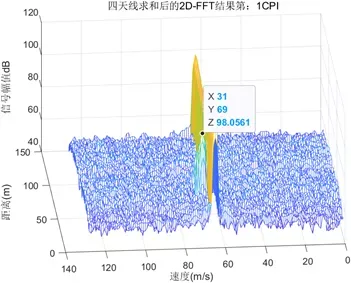
(图3-1 速度解算前)
其中,X轴是距离,Y轴是速度,上图X=31,Y=69;距离分辨率为0.48m,速度分辨率为0.083m/s。所以根据上述推导的公式,n=31-1=30;R=ΔRn =1.41m,速度分根据目标运动方向分为正负,这里一共是128个脉冲,零速通道是第64个脉冲,所以69为正速通道,具体速度通道号为Y=69-64=5;n=5-1=4;v =Δvn=0.33m/s,如图3-2所示。
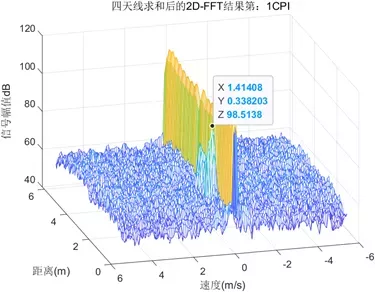
(图3-2 速度解算后)
至此,关于目标的距离估计、速度估计的解算方法解释完毕!如有疑问,请联系我。觉得写得不错,请记得点赞哦。
源码可以参考这个:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











